1
.Изобретение относится к станкостроению и может быть использовано в металлорежущих станках для поддержания необходимого усилия поджима заднего центра к обрабатываемому изделию .
Известна задняя бабка металлообрабатывающего станка, содержащая установленные в ее корпусе пиноль и щ иводной вал, связанные через упругий элемент, механизм перемещения пиНОЛи с приводом и устройство автоматического управления усилием поджима изделия с датчиками контроля этого усилия и элементом включения привода l .
Недостатком известного устройства является сложность конструкции и недостаточная надежность работы.
Целью изобретения является упрощение конструкции и повышение надежности работы.
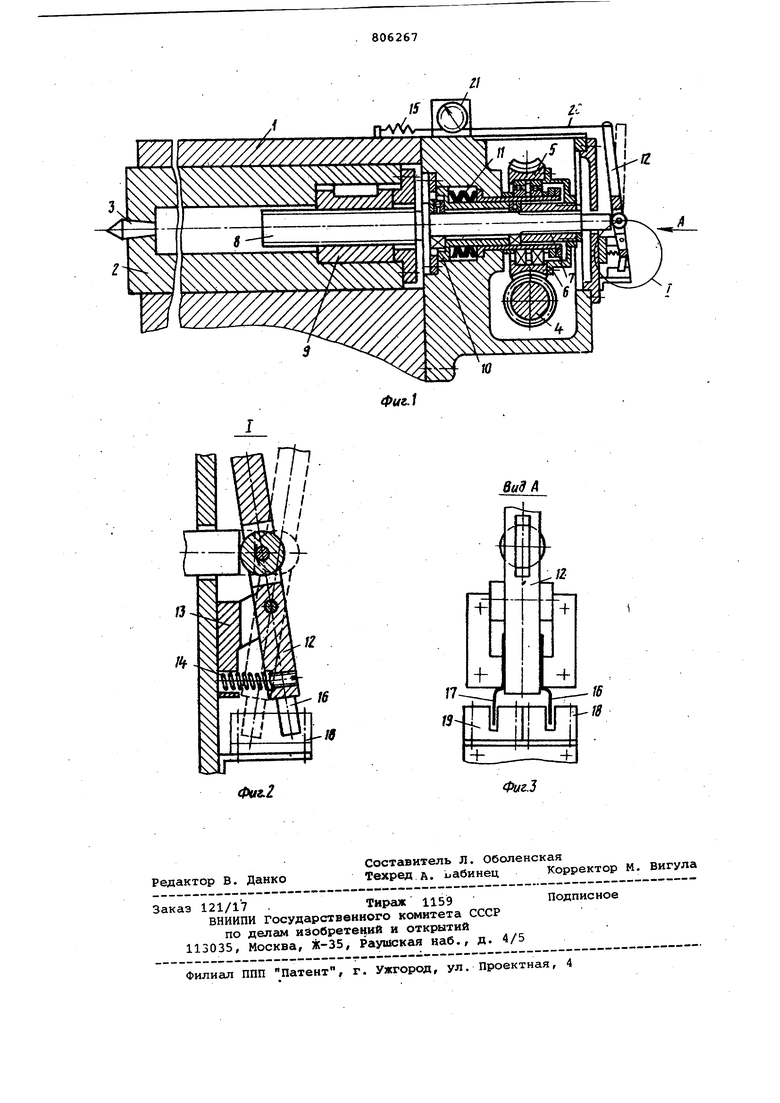
Указанная де.пь достигается тем, что в известной задней бабке датчик устройства автоматического управления усилием поджима выполнен в виде поджатого к заднему торцу приводного вала пинали коромысла, одно плечо которого связано с указателем усилия зажима, а другое - с элементом включения привода перемещения пиноли , взаимодействующей через ее приводной вс1Л и упругий элемент с коромыслом. На фиг. 1 изображена задняя бабка, общий вид; на фиг. 2 - вид 1 на фиг. 1, на фиг. 3 - вид А на фиг. 1.
Задняя бабка содержит смонтированные в ее корпусе 1 пиноль 2, подвижную в осевом направлении , установленный в пиноли 2 поджимной вращающийся центр 3 и механизм перемещения пиноли 2, приводимый в действие электродвигателем (последний на чертеже не показан). Механизм перемещения пиноли 2 включает в себя червяк 4, находящийся в постоянном зацеплении с червячным колесом 5, связанным с помощью муфты 6 и шлицевой втулки 7 с приводным валом 8 пиноли
2. Вал 8 имеет возможность осевого перемещения влево и вправоотносительно застопоренного от этого колеса 5. Передний (левый по чертежу) конец вала В имеет резьбу, посредством которой он взаимодействует с гайкой 9, связанной с помощью шпонки с пинолью 2. Автоматическое поддержание необходимого усилия поджима 3 к обрабатываемому изделию
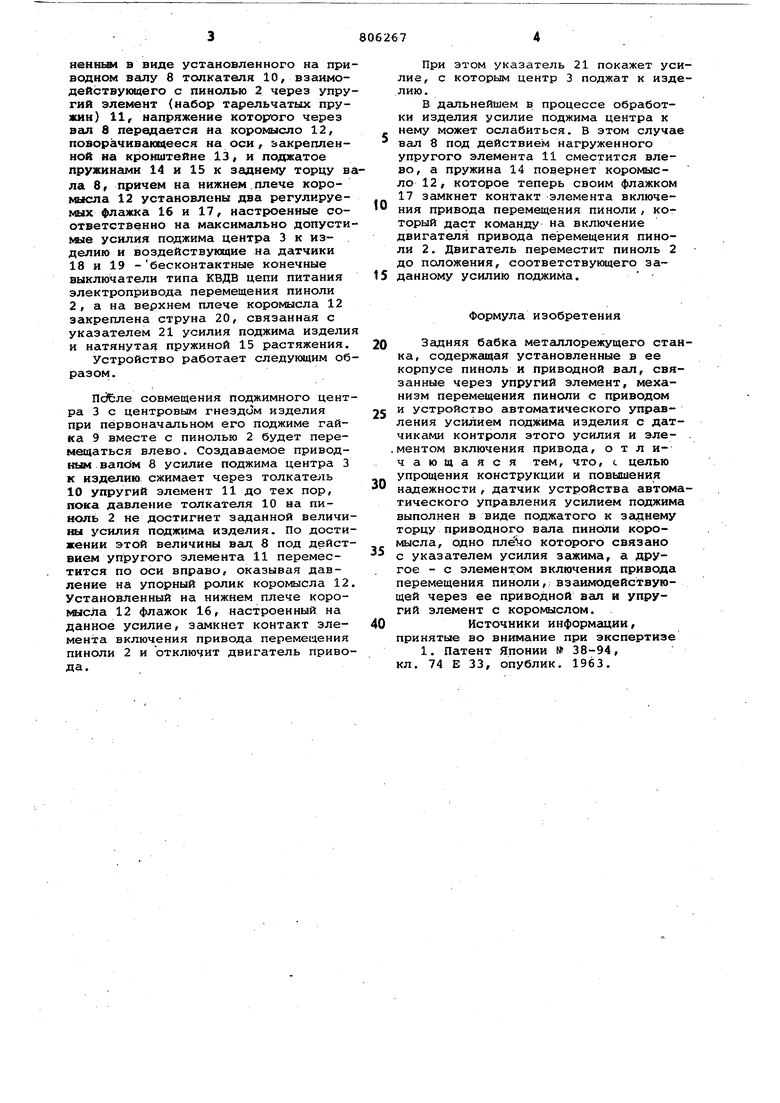
обеспечивается устройством, -ыполненным в виде установленного на приводном валу 8 толкателя 10, взаимодействующего с пинолью 2 через упругий элемент (набор тарельчатых пружин) 11, напряжение KOTOpforo через вал 8 передается на коромысло 12, поворачивающееся на оси , закрепленной на кронштейне 13, и поджатое прхжинс1ми 14 и 15 к заднему торцу вла 8, причем на нижнем.плече коромысла 12 установлены два регулируемых флажка 16 и 17, настроенные соответственно на максимально допустикые усилия поджима центра 3 к изделию и воздействующие на датчики 18 и 19 -бесконтактные конечные выключатели типа КВДВ цепи питания электропривода перемещения пиноли 2, а на верхнем плече коромысла 12 закреплена струна 20, связанная с указателем 21 усилия поджима издели и натянутая пружиной 15 растяжения.
Устройство работает следующим образом.
ПЛле совмещения поджимного центра 3 с центровым гнездом изделия при первоначальном его поджиме гайка 9 вместе с пинолью 2 будет перемещаться влево. Создаваемое приводным в а adM 8 усилие поджима центра 3 к изделию сжимает через толкатель 10 упругий элемент 11 до тех пор, пока давление толкателя 10 на пиноль 2 не достигнет заданной величины усилия поджима изделия. По достижении этой величины вал 8 под действием упругого элемента 11 переместится по оси вправо, оказывая давление на упорный ролик коромысла 12. Установленный на нижнем плече коромысла 12 флажок 16, настроенный на данное усилие, замкнет контакт элемента включения привода перемещения пиноли 2 и отключит двигатель привода.
При этом указатель 21 покажет усилие, с которым центр 3 поджат к изделию.
В Дсшьнейшем в процессе обработки изделия усилие поджима центра к нему может ослабиться. В этом случае вал 8 под действием нагруженного упругого элемента 11 сместится влево, а пружина 14 подернет коромысло 12, которое теперь своим флажком 17 замкнет контакт элемента включения привода перемещения пиноли , который даст команду на включение двигателя привода перемещения пиноли 2 . Двигатель переместит пиноль 2 до положения, соответствующего заданному усилию поджима.
Формула изобретения
0 Задняя бабка метгшлорежущего станка, содержс1щая установленные в ее корпусе пиноль и приводной вгип, связанные через упругий элемент, механизм перемещения пиноли с приводом
5 и устройство автоматического управления усилием поджима изделия с датчиками контроля этого усилия и эле.ментом включения привода, отличающаяся тем, что, с целью упрощения конструкции и повышения
надежности , датчик устройства автоматического управления усилием поджима выполнен в виде поджатого к заднему торцу приводного вала пиноспи коромысла, одно которого связано с указателем усилия зажима, а другое - с элементом включения привода перемещения пиноли,: взаимодействующей через ее приводной вал и упругий элемент с коромыслом.
0 Источники информации,
принятые во внимание при экспертизе
1. Патент Японии № 38-94, кл. 74 Е 33, опублик. 1963.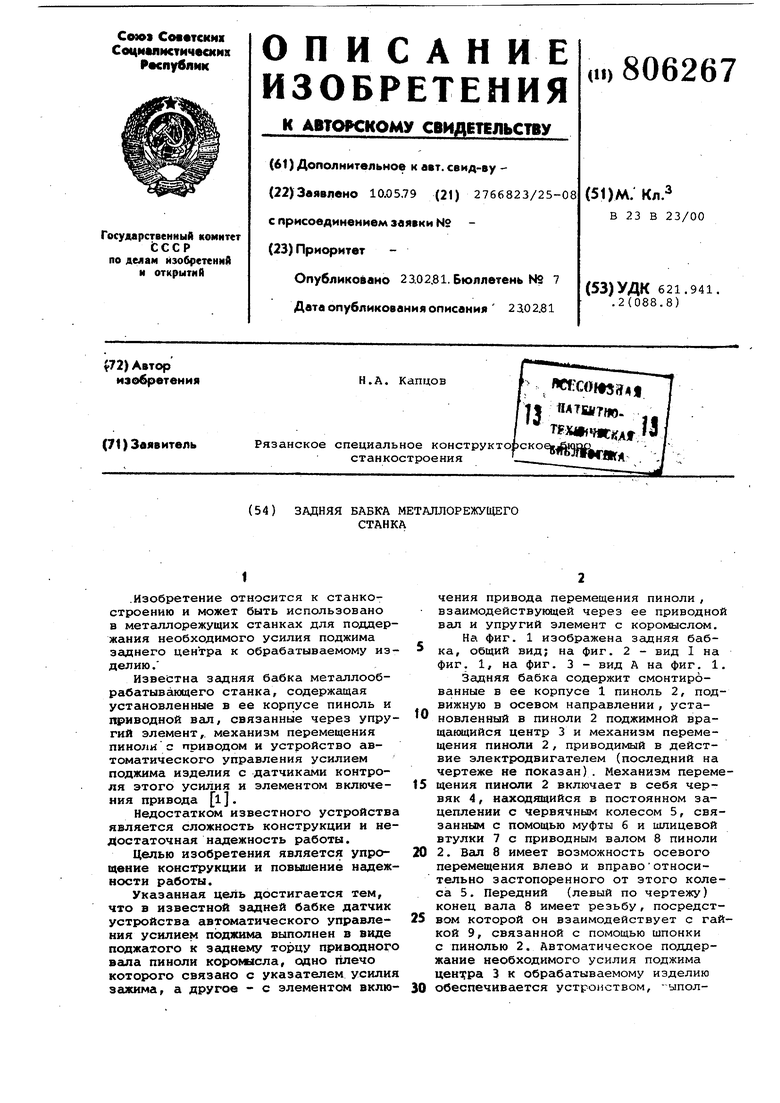
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ГИБКИ ТРУБ | 2010 |
|
RU2434703C1 |
| Центр | 1976 |
|
SU667332A1 |
| Задняя бабка с электроприводом | 1988 |
|
SU1646690A1 |
| Задняя бабка с электроприводом пиноли | 1982 |
|
SU1238892A1 |
| СПОСОБ ГИБКИ ТРУБ И СТАНОК ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2010 |
|
RU2422229C1 |
| ЗАДНЯЯ БАБКА ТОКАРНОГО СТАНКА | 1971 |
|
SU307850A1 |
| Круглошлифовальный станок | 1988 |
|
SU1546235A1 |
| Люнет | 1989 |
|
SU1731577A1 |
| Устройство для круглого шлифования | 1990 |
|
SU1780999A1 |
| Поводковый патрон | 1983 |
|
SU1110556A1 |