Изобретение относится к гидфоприводу транспортных средств и может быть пpи 4юнeнo в гидрообъемных трансмиссиях колесных тракторов автомашин и сельскохозяйственных машин.
Известен двухконтурный гида)авлический привод, содержащий гидронасос, сообщенный напорной гидролинией с делителем потока объемного типа,гидромашин которого соединены гидролиниями с гидромоторами и с устройством регулирования l.
Однако машины с таким приводом, работая на поперечном склоне, имеют плохую курсовую устойчивость.
Известен также гидравлический привод кс песной машины, содержащий гидронасос, напорная гидролиния которого соединена с делителем потока, выполненным в виде двух гидромашин, подвижные элементы которых кинематически связаны между собой, причем, каждая гидромашина гидравлически соединена с гидромоторами и устройством регулирования, выполненным в виде гид15онасоса переменной производительности с приводом от подвижных элементов гидромашин, при этом регулятор гидронасоса переменной произ.водительности кинематически связан
с рулевьм управлением колесной машины И .
Недостатком этого привода является то, что курсовая устойчивость машии без стабилизации остова, снабженных таким приводом, на поперечном склоне очень плохая, так как, например, низкоклиренсный трактор, обрабатывающий междурядья пропашных культур, на поперечном склоне в процессе движения сползает вниз по склону под действием бснсовых сил и наезжает на рядки пропашных культур.
Цель изобретения - улучшение управляемости путем повьЕиения курсовой устойчивости при движении машины поперек склона..
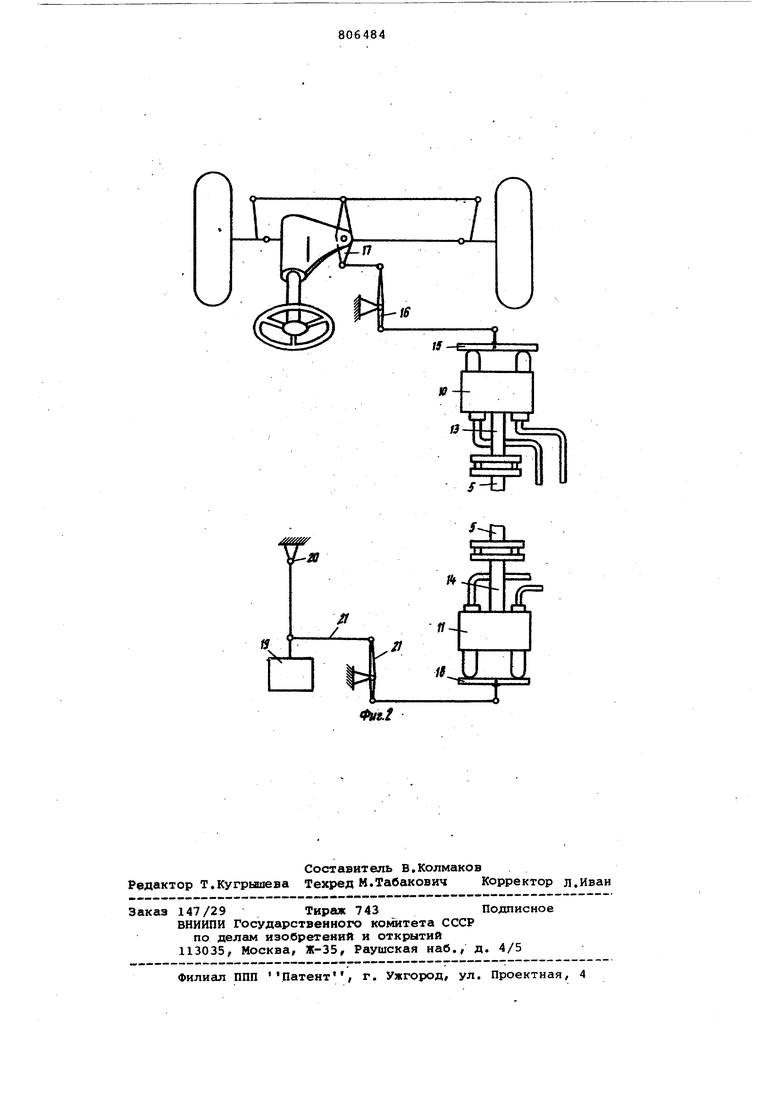
Указанная цель достигается тем, что привод снабжен вторым гидронасосом переменной производительности и датчиком угла склона, причем второй гидронасос переменной производительности гидравлически связан с обоими гидромоторами, его подвижный элемент кинематически связан с подвижными элементами упомянутых гид: ромгшшн, а регулятор второго насоса переменной производительности связан с датчиком угла склона. На фиг. 1 показана гидравлическая устройства; на фиг, 2 - гидромеханическая схема регулирования. Гидравлический привод содержит гидронасос 1, сообщенный напорной линией 2 с делителем потока объемного типа, гидромашины 3 и 4 которого механически связаны между собой с по мошью вала 5. Гидромашины 3 и 4 такж соединены при помопщ гида олиний б я 7с гидромоторами 8 и 9, которые сов местно с гидромашинами 3 и 4 образуют два контура гидропередачи. Кроме того, гидролинии б и 7 сообщены между собрй с помощью насоси 10 и насоса 11, а гидромоторы 8 и 9 с помощью гидролинии 12 сообщены с гида онасосо 1. Вал 5 объемного делителя потока соединен с валом 13 гидронасоса 10 и с валом 14 гидронасоса 11. Регулятор производительности насоса 10, например шайба 15, кинематически свя зан с помощью передаточного механизма 16 с рулевым управлением машины 17. Регулятор производительности на coca 11,. например шайба 18, связан с датчиком угла склона, например с маятником 19 подвешенным на оси 20 с помощью передаточного механизма 21« Гидравлический привод имеет также систему подпитки, содержащую гидробак 22, насос 23 подпитки, фильтр 24 и клапан 25,: Гидравлический привод работает следующим образом. Жидкость из напорной гидромашины 2 поступает к гидромашвнам 3 и 4 и данее к гидромоторам 8 и 9, Производительность насосов 10 и 11 определя ется положением регулятора производи тельности, т.е. положением шайбы 15 и шайбы 18, и скоростью вращения валов 5, 13 и 14. при движении манганы по-прямой на горизонтальной поверхности производи тельность насосов 10 и 11 равна нулю Расходы жидкости через гидромашины 3 и 4 одинаковы, а следовательно, и ча тоты вращения гиДромоторов 8 и 9 рав ны между собой. Если сцепление с поч вой одного из колес ухудшается, то уменьшается перепад давлений на соот ветствующем гидромоторе, например 8, 8связи с этим увеличивается перепад давлений на гидромашине 3, которая начинает работать в режиме гидродвигателя и создает крутящий момент на валу 5. При этом гидромашина 4 начинает работать в насосном режиме давление в гидролинии 7 увеличивается. Повышение давления вызывает соот ветствующее увеличение крутящего момента гидромотора 9 правого контура гидропередачи. Следовательно, частот вращения гидромоторов 8 и 9 остается одинаковой, а крутящий момент перераспределяется между гидромоторами. При этом суммарная сила тяги колес остается неизменной, что обеспечивает высокую проходимость машины. При движении машины на повороте каждый регулятор производительности изменяет свое положение в соответствии с положением рулевого.управления. При этом насос 10 начинает перекачивать часть жидкости из одного контура гидропередачи в другой, а производа€тельность насзоса 11 равна нулю. Гидромоторы 8 и 9 начинают вращатьтгя с различными частотами вращения, что и необходимо для поворота машины. Соотношение скоростей, определяется производительностью насоса 10.. Если при повороте сцепление одного из колес ухудшается, то крутящий момент одного колеса уменьшается, а щ угого увеличивается. Однако расходы гидромашин. 3 и 4 остаются одинаковыми, как и При движении мшиины по прямой, а производительность насоса 10 при неизменном положении рулевого управления зависит от частоты вращения вала 13. При движении на поперечном, например, правом склоне машина наклоняется и маятник 19, стремясь под действием силы тяжести сохранить свое равнов.есие, поворачивается против часовой стрелки вокруг оси 20 и воздействует через передаточный механизм 21 на наклонную шайбу 15 гидронасоса 11 так что гидронасос 11 начинает перекачивать часть жидкости из левого, т.е. верхнего по склону контура гидропередачи в правый, т.е. нижний по склону контур гидропередачи. В результате этого гйдромотор 8 начинает Ечращаться медленнее, а гидромотор 9 быстрее,и машина постоянно поворачивается вверх по склону с определенным радиусом, компенсируя тем самым ее сползание вниз по склону. Ращиус поворота машины зависит от отклонения маятника 19 от своего первоначального положения. При движении на левомрсклоне машина наклоняется влево и маятник 19 поворачивается вокруг оси 20 по часовой стрелке и воздействует через передаточный механизм 21 на наклонную шайбу 15 гидронасоса 11, так что он начинает пере.качивать часть жид.кости из правого контура гидропередачи в левый, обеспечивая поворот машины вверх по склону. При повороте машины на поперечном склоне вверх по склону насос 10 перекачивает жидкость в ту же сторону, что и насос 11, Следовательно, разность частот вращения гидромоторов 8 и 9 еще больще увеличивается, что и необходимо для поворота. При повороте Мсццины на поперечном склоне вниз по склону насос 10 перекачивает жидкость в направлении, противоположном направлению перекачивания насоса 11, Следовательно, разность частот вращения гидромотора 8 и 9 уменьшается и, в зависимости от крутизны склона, может поменять знак. Путем подбора передаточных отношений связей между положениями рулевого управления, датчика угла склона и регуляторами производительности насосов 10 и 11 можно добиться необходимого соотношения частот вргицения гидромоторов 8 и 9. При использовании предлагаемого гидравлического привода повышается курсовая устойчивость машин при работе на поперечном склоне, в результате чего снижается повреждаемость пропашных культур при работе в между рядье, улучшается качества обработки и пошлаается рабочая скорость, Формула изобретения Гидравлический привод колесной ма Ьшны, содержащий гидфонасос, ншюрва гидрблиния которого соединена с делителем потока,выполненным в виде двух гищ омашин, подвижные элементы кото|)bfx кинематически связаны ,между соОой причем каждая гидррмёштна гидфавличес ки соединена с гидро.моторами и устройством регулирования, выполненным в виде.гидронасоса переменной пройэводитедьности с приводом от подвижных элементов гилромашин, при этом регулятор гидронасоса переменной гфоизводительиости кинематически связан с рулевьач управлением колесной машины, отличающийся, тем, что/ с целью улучшения управляемкостипутем покянения курсовой устойчивости при движении машины попе рек склонаг он снабжен вторым гидронасосом переиекной производительности и датчиком угла склона, причем второй гидронасос переменной производительности гидравлически связан с обоими ги;в с к торами, его подвижный элемент кинематичвскя связан с подвижными элементами упомянутых гйдромашин, а регулят ф второго насоса переменной прояэводятельиости связан с датчиком угла склона. Источники инф01Я4ации, принятые во внимание при экспертизе 1,патент 4 анции 2199836, кл, F 16 Н 39/00, 1974, 2,Авторское свидетельство СССР 38181, кл. Pits Н 39/46, 1974 (прототип).
s-U

| название | год | авторы | номер документа |
|---|---|---|---|
| Двухконтурный гидравлический при-ВОд КОлЕС ТРАНСпОРТНОгО СРЕдСТВА | 1979 |
|
SU821238A1 |
| Двухконтурный гидравлический привод колес транспортного средства | 1981 |
|
SU954263A1 |
| Транспортное средство | 1987 |
|
SU1414666A2 |
| Транспортное средство | 1986 |
|
SU1337288A1 |
| Объемная гидропередача транспортного средства | 1976 |
|
SU654459A1 |
| Гидрообъемный привод транспортного средства | 1987 |
|
SU1414665A1 |
| САМОХОДНАЯ МАШИНА С ОБЪЕМНОЙ ГИДРОПЕРЕДАЧЕЙ | 2002 |
|
RU2241609C2 |
| ГИДРАВЛИЧЕСКАЯ ПЕРЕДАЧА | 2014 |
|
RU2557105C1 |
| Гидрообъемно-механическая трансмиссия тяжеловозного транспортного средства | 2016 |
|
RU2613143C1 |
| ГИДРООБЪЕМНАЯ ПЕРЕДАЧА | 2004 |
|
RU2274787C2 |