Изобретение относится к машиностроению и может быть применено в качестве ведущего элемента передач с гибкой связью в различных станках и машинах.
Цель изобретения - повьшение надежности работы привода путем обеспечения автоматического натяжения гибкой связи независимо от угла ее наклона к горизонту.
На фиг. 1 представлен привод, общий вид.; на фиг. 2 - вид А на фиг.1; на фиг. 3 - вид Б на фиг. 2; на фиг. 4 - схема смещения оси двигателя при регулировании; на фиг, 5 - силы, действующие на привод.
Самонатяжной привод включает основание 1, размещенные на нем стой- ки 2, направляющие 3 и 4, выполненные в виде наклонных пазов, ползуны -(5 и 6, взаимодействуюище с соответ- ствующей направляющей 3 и 4, электродвигатель 7 с установленным на его валу шкивом, опираюпщйся на плиту 8, два винта 9 и 10, расположенные эксцентрично оси двигателя и имеющие резьбу противоположного направления. 1а винтах установлены гайки 11 и 12, каждая из которых связана с соответствующим ползуном 5 и 6.
Привод снабжен валом 13, установленным коаксиально винтам 9.и 10, выполненным в виде втулок, жестко связанных посредством плиты 8 с элек тродвигателем 7. На вал 13 навиты в противоположных направлениях две ленты 14 и 15, один из концов каждой из которой закреплен на валу 13, а другой - на основании 1. Гайки 11 и 12 установлены с возможностью поворота относительно ползунов 5 и 6 во втулках 16 и 17, охватывающих гайки и жестко связанных с ползунами посредством цапф 18, а также имеют возможность возвратно-поступательного движения вдоль вала 13 и зафиксированы от поворота относительно последнего посредством шпонок 19, взаимодействующих с пазами крьшек 20 гаек 11 и 12. Направляющие 3 и 4 выполнен в стойках 2.
Привод может быть снабжен двумя рычагами 21, каждый из которых жестк связан одним концом с соответствую- щим ползуном 5, 6 посредством втулок 16, 17 и цапф 18, а другим подпружинен к электродвигателю 7 посредством пружины 22, упирающейся одним концом
0
40
в плиту 8, другим - в подпятник 23, размещенный на оси 24, связывающей концы рычагов 21.
Привод работает следуюш 1м образом. При появлении нагрузки на ведомом валу ременной передачи на валу электродвигателя 7 появляется крутящий момент ,a на корпусе - равньй ему
Q и противоположный по направлению реактивный момент М , который поворачивает двигатель относительно оси вала 13 на угол If . Винты 9 и 10, поворачиваясь в гайках 11 и 12, пере5 мещают последние вдоль вала 13, а ползуны 5 и 6 - вдоль пазов 3 и 4 на величину О O j . Одновременно ленты 14 и 15 вследствие этого смещения поворачивают вал 13, компенсируя поворот на угол Ч и вызывая дополнительное смещение 0 Og. В результате суммирования этих смещений происходит перемещение оси вращения вала электродвигателя А А ДН по прямой,
где
5 соответствующей условию F 1 И , где 1 - величина смещения оси двигателя относительно оси вала 13, а F - сила натяжения гибкой связи, которая таким образом автоматически 0 меняется в зависимости от момента, передаваемого ременной передачей.Для выполнения этого условия необходимо соблюдение равенства , Ч- д Н
360 d - диаметр вала 13 в месте
крепления.лент 14 и 15. Пружина 22 обеспечивает уравновешивание веса электродвигателя 7, исключая его влияние на натяжение гибкой связи.
Формула изобретения
1. Самонатяжной привод, содержащий основание, размещенные на нем стойки, направляющие в виде наклонных к основанию пазов, ползуны, взаимодействующие с соответствующей нап50 равляющей, электродвигатель с установленным на его валу шкивом, два винта, расположенные эксцентрично оси электродвигателя и именщиё резьбу противоположного направления, ус55 тановленные на. винтах гайки, каждая из которых связана с ползуном, отличающийся тем, что, с целью повышения надежности работы привода путем обеспечения автоматичес45
3128
кого натяжения гибкой связи независимо от угла ее наклона к горизонту, винты выполнены в виде втулок, жестко связанных с электродвигателем, привод снабжен валом, установленным коаксиально втулкам, двумя лентами, навитыми на вал в противоположных направлениях, один из концов каждой из которых закреплен на валу, а другой - на основании, гайки связаны с ползунами с возможностью поворота
74
относительно последних и зафиксированы от поворота относительно вала, а направляющие выполнены в стойках.
2. Привод по п. 1, отличаю- щ и и с я тем, что он снабжен двумя рычагами, каждый из которых жестко связан одним концом с соответствующим ползуном, а другим подпружинен к электродвигателю.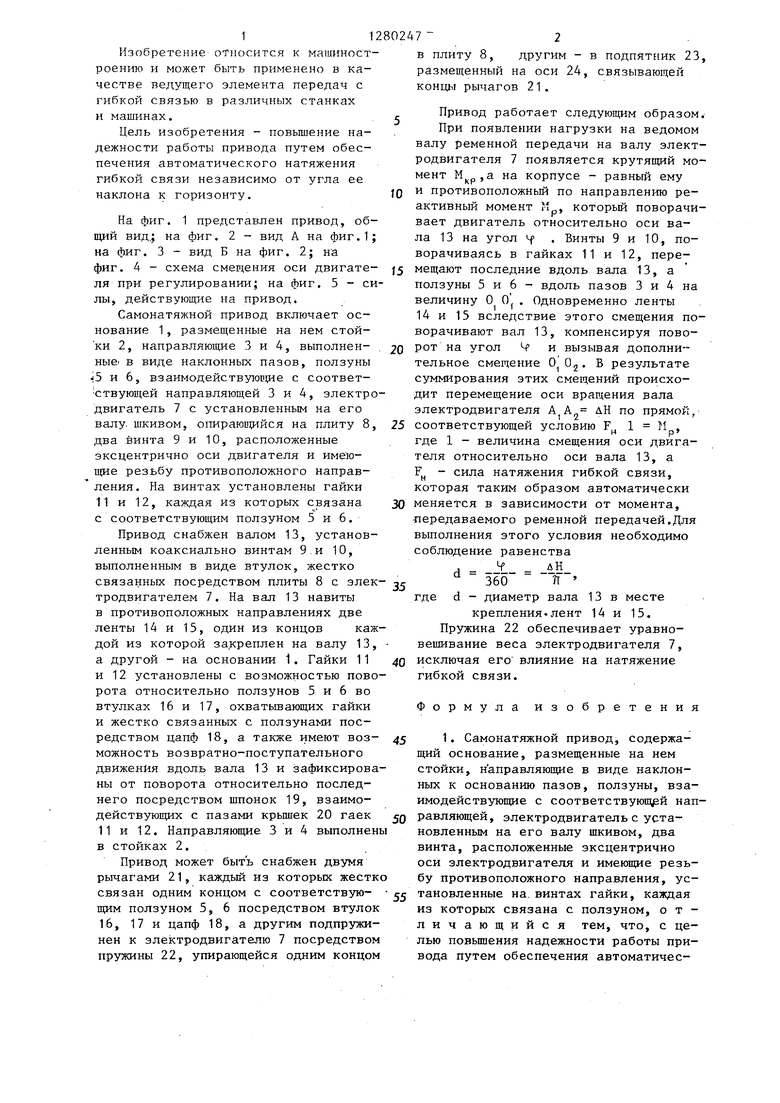
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ ЗАКРУГЛЕНИЯ ЛЕНТЫ РАСШИРЕННОГО ГРАФИТА НА РЕБРО | 2001 |
|
RU2201544C1 |
| Вайма для сборки рамок корпусов струнных музыкальных инструментов | 1987 |
|
SU1444146A1 |
| Станок для пробивки в ленте отверстий и последующей намотки ее в рулон | 1979 |
|
SU1114322A3 |
| Регулируемая передача | 1983 |
|
SU1132083A1 |
| СТАНОК ШЛИФОВАЛЬНЫЙ ШИРОКОЛЕНТОЧНЫЙ | 2001 |
|
RU2182073C1 |
| Стенд для исследования воздействия срезающего аппарата капустоуборочных машин на растение | 1981 |
|
SU1006959A1 |
| Самонатяжной привод с гибкой связью | 1980 |
|
SU937836A1 |
| УНИВЕРСАЛЬНЫЙ КРУГЛОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2050248C1 |
| Универсальный деревообрабатывающий станок | 1990 |
|
SU1797567A3 |
| Станок для надрезания гибких неметаллических лент с двух сторон | 1990 |
|
SU1750945A1 |


Самонатяжной привод относится к машиностроению и может быть применен в качестве ведущего элемента передач с гибкой связью в различных станках и машинах. Цель изобретения - повьшге- ние надежности работы привода путем обеспечения автоматического натяжения гибкой связи независимо от угла ее наклона к горизонту. Привод содержит электродвигатель 7,установленный эксцентрично на винтах 9,10, выполненных в виде полых втулок и посредством гаек 11,12 связанных с ползунами, взаимодействующими с наклонными направляющими стоек. Внутри винтов 9,10 установлен вал 13, связанный с основанием 1 посредством лент 14,15. Гайки 11,12 жестко связаны с рычага ш, подпружиненными к электродвигателю 7. При изменении крутящего момента на валу электродвигателя 7 происходит поворот винтов 9,10 в гайках 11,12 и смещение, ползунов по пазам, что приводит к автоматическому изменению усилия на- тяжения гибкой связи. Пружина 22 служит для компенсации электродвигателя 7. 1 з.п. ф-лы, 5 ил. СЛ 15 1017 П 23 to 00 о to 4i 1 V 22 9 № //
Фиг.г
ejpf/г.З
/)//:
Л
HP
Редактор М. Бандура
Составитель В. Карасев
Техред М.Ходанич- Корректоре. Шекмар
Заказ 7041/35Тираж 880Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г, Ужгород, ул. Проектная, 4
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Приспособление в центрифугах для регулирования количества жидкости или газа, оставляемых в обрабатываемом в формах материале, в особенности при пробеливании рафинада | 0 |
|
SU74A1 |
| Авторское свидетельство СССР №884272, кл | |||
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
