(54) СИСТЕМА С ПЕРЕМЕННОЙ СТРУКТУРОЙ
| название | год | авторы | номер документа |
|---|---|---|---|
| СЛЕДЯЩАЯ СИСТЕМА | 1978 |
|
SU1840029A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ РЕЖИМОВ РАБОТЫ ГАЗОТУРБИННОГО ДВИГАТЕЛЯ | 1990 |
|
SU1802581A1 |
| СИСТЕМА УПРАВЛЕНИЯ С ПЕРЕМЕННОЙ СТРУКТУРОЙ | 1992 |
|
RU2034695C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| Следящая система | 1977 |
|
SU734610A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Следящая система | 1984 |
|
SU1216773A1 |
| Устройство для регулирования скоростидВигАТЕля | 1979 |
|
SU798748A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| Система адаптивного управления параметром технологического процесса | 1988 |
|
SU1620989A1 |
1 I
Изобретение относится к системе с переменной структурой и может быть использовано для управления объектами, обладающими большой инерционностью.
Известа система с переменной структурой, содержащая последовательно соединенные згщатчик, измеритель рассогласования, суммирующее устройство, исполнительный механизм и . объект регулирования, выход которого соединен со .вторым вxoдo irизмepителя рассогласова:ния и первшм входом блока формирования функции переключения, второй вход которого - с первым входом измерителя рассогласования, а выход через функциональный преобразователь - со вторым входом . суммирующего устройства, в котором значение функции переключения сравнивается с некоторым заданным пороговым значением и в зависимости от результатов сравнения осуществляется переключение к системе 11 и 2J.
Известна также система, содержащая последовательно соединенные задатчик, измеритель рассогласования, усилитель, сумма,тор, исполнительный механизм, выход которого соединен со вторым входом измерителя рассогласования и через датчик скорости с первым и вторым функциональными преобразователями, выход измерителя рассогласования соединен через последовательно соединенные пороговое устройство и первый элемент И со вторым входом первого функционального преобразователя и непосредственно - с первым входом компаратора,
второй вход которого соединен с выходом второго функционального преобразователя, а выход которого через элемент НЕ - со вторым входом первого элемента И, а также с первым
входом второго элемента И, второй вход которого соединен с выходом порогового устройства, а выход через первый функциональный преобразователь - со вторым входом сумматора.
Система такого вида позволяет добиться повыяенйя быстродействия и значительного умейшени я перерегулирования при управлении объектами,обладающими большими инерциониостями
13J. .
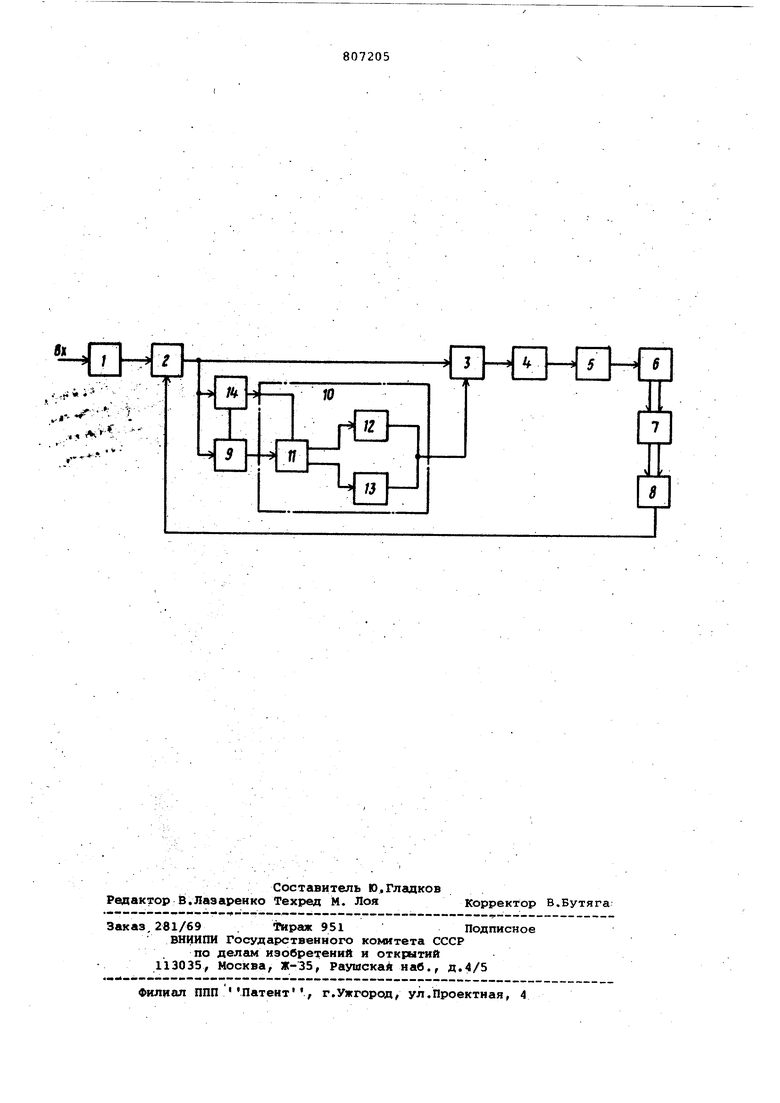
Наиболее близкой по технической сущности является система с переменной структурой, содержащая последрвательно соединенные задатчик, feMe;ритель рассогласования, сумматор. преобразователь код-аналог, усилитель мощности, исполнительный механизм, редуктор и цифровой датчик, выход которого соединен со вторым входом измерителя рассогласования, .выход которого соединен с первым входом первого функционального преобразователя и через последовательно соединенные блок формирования функции переключения и второй функциональный преобразователь - со вторым входом сумматора Г4. Недо.статком известной системы является ее низкое быстродействие при отработке больших рассолгасований (до 1800) . Цель изобретения - уменьшение перерегулирования и повышение быстродействия системы. Поставленная цель достигается те что в системе второй вход первого функционального преобразователя сое динен со вторым выходом блока, фсэрми рования функции переклю 1ения, а выход - со вторым входом второго функ ционального преобразователя. На чертеже.приведена блок-схема предлагаемой системы. Системасодержит задатчик 1, измеритель 2 рассогласования, сумма тор 3, преобразователь 4 код-аналог усилитель 5 мощности, исполнительный механизм б, редуктор 7, цифрово датчик 8, первый 9 и второй 10 функ циональные преобразователи,переключатель II, первый 12 и второй 13 корректирующие усилители, блок 14 формирования функции переключения. Система работает следующим образом. Задатчик 1 вырабатывает сигнал fbgxB виде двоичного кода. Входной сигнал система, изменяясь по синусо идальному, пилообразному, ступенуатому или какому-либо другому закон в зависимости от режима работы, скл дывается в измерителе 2 рассогласов ния с сигналом обратной связи поступающим с цифрового датчика 8 также в виде двоичного кода. Сигнал рассогласования Л fi, вычисленный в измерителе 2 рассогласования по фор муле ДР Рвх-р&ых поступает на входы сумматора 3, бло 14 формирования функции переключени и функционального преобразователя 9 В блоке 14 формирования функции переключения происходит вычисление скорости изменения сигнала рассогла сования по формуле jVMV-1 др, где AfJf, иДД .- значения сигнала ра согласования в п-й и (п-1)-ый моменты времени соответственн с - временной интервал квантования. Полученное значение Л(- сравниватся с заданным минимальным порог-овым значением скорости изменения сигнала рассолгасования лВцор . ри выполнении неравенства Лр Дрпор К ВЫХОДУ функционального преобразователя 9, при помощи переключателя 11, подключается корректирующий усилитель 13, в противном случае - корректирующий усилитель 12. Переключатель 11 и корректирующие усилители 12 и 1-3 входят в состав второго функционального преобразователя. В свою очередь сигнал др, вычисленный в блоке 14 формирования функции переключения, поступает на второй вход функционального преобразователя 9, который является - цифровым логическим устройством, предназначенным для вычисления корректирующих коэффициентов, зависящих от скорости изменения сигнала рассогласования 4,i и величины сигнала рассогласования Д , поступающей на первый вход функционального преобразователя У., Вычисление корректирующих коэффициентов Кд, К производится по следующим формулам - npMJaftUuf3nop , ПрЦ/Д(Ъ/ 4 АРПор -- ,при Б 4 , при/лр/Ж , постоянные величины, подбираемые в процессе настройки системы; заданное максимальМАХное пороговое значение скорости изменения сигноша рассогласования, На выходе функционального преобразователя 9 появляется сигнал,стабилизирующий работу системы, , который поступает на вход либо усилителя 12,, либо усилителя 13, в зависимости от состояния переключателя 11, определяемого неравенством (3) . Усилители 12 и 13 способствуют осуществлению грубой и точной коррекции величины и знака управляющего воздействия и имеют постоянные коэффициенты усиления, причем ,з ,(7)
где К
коэффициент усиления уси12лителя 12 для осуществления грубой коррекции; коэффициент усиления лителя 13 для осуществления точной коррекции,
и К
К подбираются в процессе
13 настройки системы. В зависимости от скоростид и величины ошибкиД К,и К, определяют момент включ ения торможения после разгона объекта и точность отслеживания входного сигнала Ь
С выхода функционального преобразователя 10 сигнал
Кор
, приработе
12, усилителя
1
, приработе
13(8) усилителя
поступает на вход сумматора 3,где, складываясь с сигналом измерителя 2 рассогласования, образуе Т управляющее воздействие
1
...
При воздействии на систему большого сигнала рассогласования выполняется неравенство
/ P l /f vopl. Это способствует свободному разгону объекта управления, а следовательно, и быстрой отработке имеющегося рассогласования.
В момент времени, когда
|й{ 1Ириор1,
наступает этап торможения, продолжающийся до.тех пор, пока выполняется условие
/д(/-|р:ор|.
При достижении сигналом рассогласования скоростилр,( 14 формирования функции перетаючения выдает сигнал на переключение с усилителя 12 на усилитель 13 с меньшим коэффициентом усиления.
Так как к этому моменту сигнал рассогласования лр и скорость изменения сигнала рассогласования д (5 малы, то данное переключение снижает вес , что в целом уменьшает колебательность и величину максимального перерегулирования переходного процесса в системе. Предлагаемая система без какого-либо изменения функциональной структуры может-быть выполнена как в цифровом, так и в аналоговом виде,
,Использование предлагаемого изобретения при управлении объектом с большими инерционностями сокращает длительность переходного процесса системы при отработке больших рас0согласований на 10-15%, что приводит к повышению быстродействия системы.
формула изобретения
15
Система с переменной структурой, содержащая последовательно соединенные задатчик, измеритель рассогласования, сумматор, преобразователь код-аналог, усилитель мощности, ис0полнительный механизм, редуктор и цифровой датчик, выход которого соединен со вторым входом измерителя рассогласования, выход которого соединен с первым входом первого функ5ционального преобразователя и через последовательно соединенные блок формирования функции переключения и второй функциональный преобразователь - со втоЕИлм входом сумматора,
0 отличающаяс я тем, что, с целью уменьшения перерегулирования и повышения быстродействия системы, в ней второй вход первого функционального преобразователя соединен
5 со вторым выходом блока формирования функции переключения, а выход со вторым входом второго функционального преобразователя.
Источники информации,
0 принятые во внимание при экспертизе
№ 334551., кл. G 05 В 13/02, 05.04.71.
№ 551609, кл. G 05 В 13/02, 15.04.75..
5 по заявке № 2439991/18-24,
кл. G 05 В 11/01, 03.01.77.
0
с.56-64, (303-326 (прототип).
.., ,..
t т
..
