дом пятого элемента ИЛИ, третий вытход - с первым входом шестого элемента ИЛИ, второй выход - с первым входом седьмого элемента ИЛИ и с информационнь м входом пятнадцатого элемента И, а четвертый выход - с пер- . вым входом восьмого элемента ИЛИ и с информационным входом десятого элемента И,-подключенного выходом к первому входу девятого элемента ИЛИ, второй вход которого связан с выходом пятнадцатого элемента И, а выход - с информационными входами четвертого и пятого элементов И, первый и третий выходы блока интерполяции программы снятия припуска соединены со вторыми входами седьмого и восьмого элементов ИЛИ соответственно, второй выход - со вторым входом пятого элемента ИЛИ и с информационным входом шестнадцатого элемента И, а четвертый выход - со вторым входом шес-1 того элемента ИЛИ и с информационным входом девятого элемента И,подключенного выходом к первому входу десятого элемента ИЛИ, второй вход которого соединен с выходом шестнадцатого элемента И, а- выход - с информационными входами третьего и шестого элементов И, суммирующий вход реверсивного счетчика подключен к выходу одиннадцатого, а вычитающий входк выходу двенадцатого элементов ИЛИ, информационные входы двенадцатого и тринадцатого элементов И соединены с выходами пятого и шестого элементов ИЛИ соответственно, а выходы со входами двенадцатого элемента ИЛИ, информационные входы четырнадцатого и одиннадцатого элементов И соединены с выходами восьмого и с дьмого элементов ИЛИ соответственно, а выходы - со входами одиннадцатого элемента ИЛИ, причем выходы первого, второго, третьего и четвертого коммутаторов подключены ко входам соответствующих блоков вывода информации.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для двухкоординатного программного управления | 1981 |
|
SU962857A1 |
| Система программного управления | 1984 |
|
SU1200245A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для программного управления | 1984 |
|
SU1255993A1 |
| Устройство для коррекции положения резца на станке с программным управлением | 1981 |
|
SU983651A1 |
| Устройство для программного управления | 1986 |
|
SU1376065A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для программного управления | 1986 |
|
SU1397878A1 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
| Устройство для программного управления | 1984 |
|
SU1193643A1 |
ПРОГРАММНОЕ ЗАДАКЩЕЕ УСТРОЙСТВО ДЛЯ ТОКАРНОГО СТАНКА.С ПРОГРАММНЫМ УПРАВЛЕНИЕМ, содержащее блоки вывода информации, блок задания скорости, блок интерполяции программы снятия припуска, первый и второй выходы которого подключены к информационным входам первого коммутатора, а третий и четвертый выходы-- к информационным, входам второго коммутатора, блок интерполяции программы чистовой обработки, соединенный первым и вторым выходами с информационными входами третьего коммутато- р.а, а третьим и четвертым выходами с информационными входами четвертого коммутатора, отличающееся тем, что, с целью упрощения подготовки и отладки программны и упрощения устройства, оно содержит генератор импульсов, задатчик ведущей координаты, элементы И, ИЛИ, триггер, реверсивный счетчик, элемент НЕ и дешифратор, вход которого .соединен с выходами реверсивного счетчика, а выход - со входом элемента НЕ и с управляющими входами первого, второго, третьего и четвертого элементов И и третьего и четвертого коммутаторов, выход элемента НЕ подключен к управляющим входам пятого, шестого, седьмого и восьмого элементов И и первого и второго коммутаторов, первый выход задатчика ведущей координаты соединен с управляющими входами девятого, десятого, одиннадцатого и двенадцатого элементов И, а второй выход - с управляющими входами тринадцатого, четырнадцатого, пятнадцатого и шестнадцатого элементов И, входы первого элемента ИЛИ. подключены к выходам седьмого и второго элементов И, а выход - к управляющему входу блока интерполяции программы снятия припуска, вь1хода1 четвертого и шестого элементов И соединены со входами второго элемента ИЛИ, а выходы третьего и пятого элементов И - со входами третьего элемента .ИЛИ, выход которого и выход второго элемента ШШ подключены соответственно to к инверсному и прямому входам тригф гера, связанного прямым выходом с управляющим входом семнадцатого эле00 00 мента И, информационный вход которого подключен к выходу генератора импульсов, а выход - к информационным входам второго и восьмого элементов И, выход блока задания скорости подключен к информационным входам седьмого элемента И и первого элемента И, связанного выходом с первым входом четвертого элемента ИЛИ, второй вход которого подсоединен к выходу восьмого элемента И, а выход - к управляющему входу блока интерполяции программы чистовой обработки, первый выход которого соединен с первым вхо
Изобретение относится к области автоматики и вычислительной техники и может быть использовано в системах числового программного управления станками.
Известно устройство для программного управления станком, содержащее блок ввода программы, соединенный с блоком задания скорости, интерполятор, связанньш с блоком ввода програ(мы и блоком задания скорости, а выходы интерполятора подключены ко входам блока управления приводами. В этом устройстве все движения инструмента, которые необходимо выполнять в процессеобработки детали, т.е. черновые проходы и холостые ходы, задаются отдельными кадрами программы. Недостатком данного устройства является сложность подготовки и отладки программ, так как каждое движение инструмента задается отдельным кадром программы, поэтому объем информации программы во много раз превосходит объем информации, содержащейся в чертеже детали. Кроме
того, при необходимости изменить (откорректировать) какой-либо размер детали приходится корректировать не только кадры чистового прохода,
но также и кадры всех промежуточных черновых проходов и холостых ходов, что значительно усложняет отладку iпрограмм. Кроме того, большая длина программных перфолент значительно
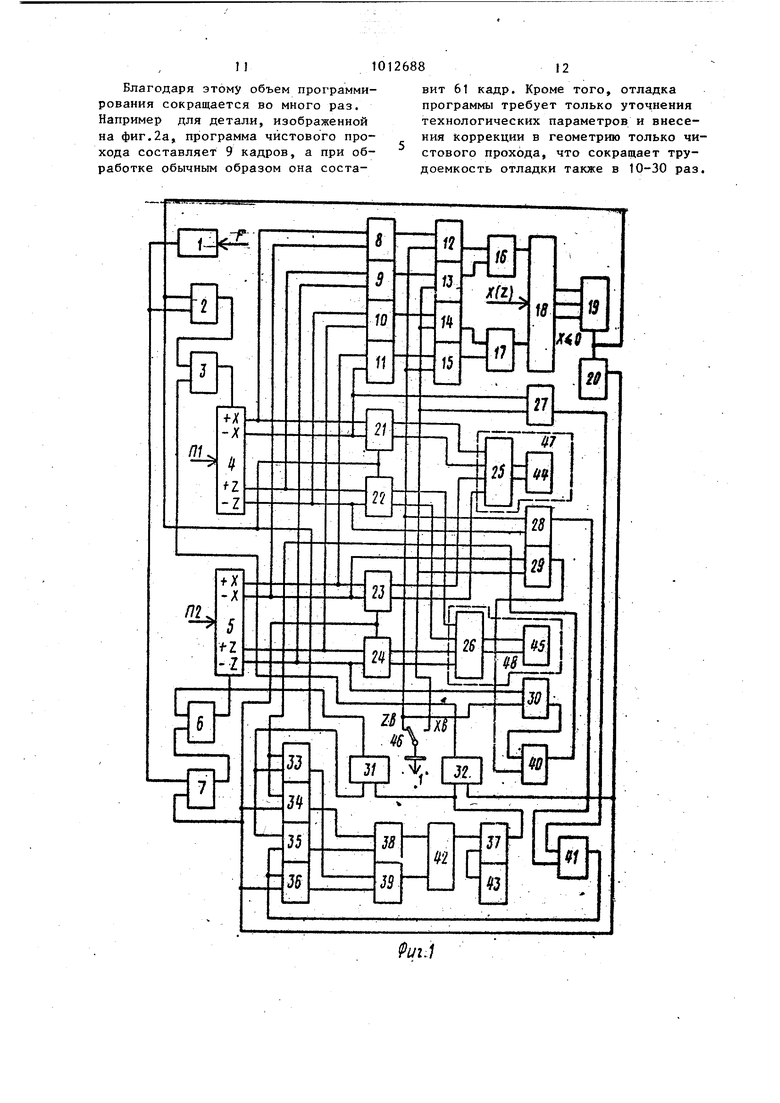
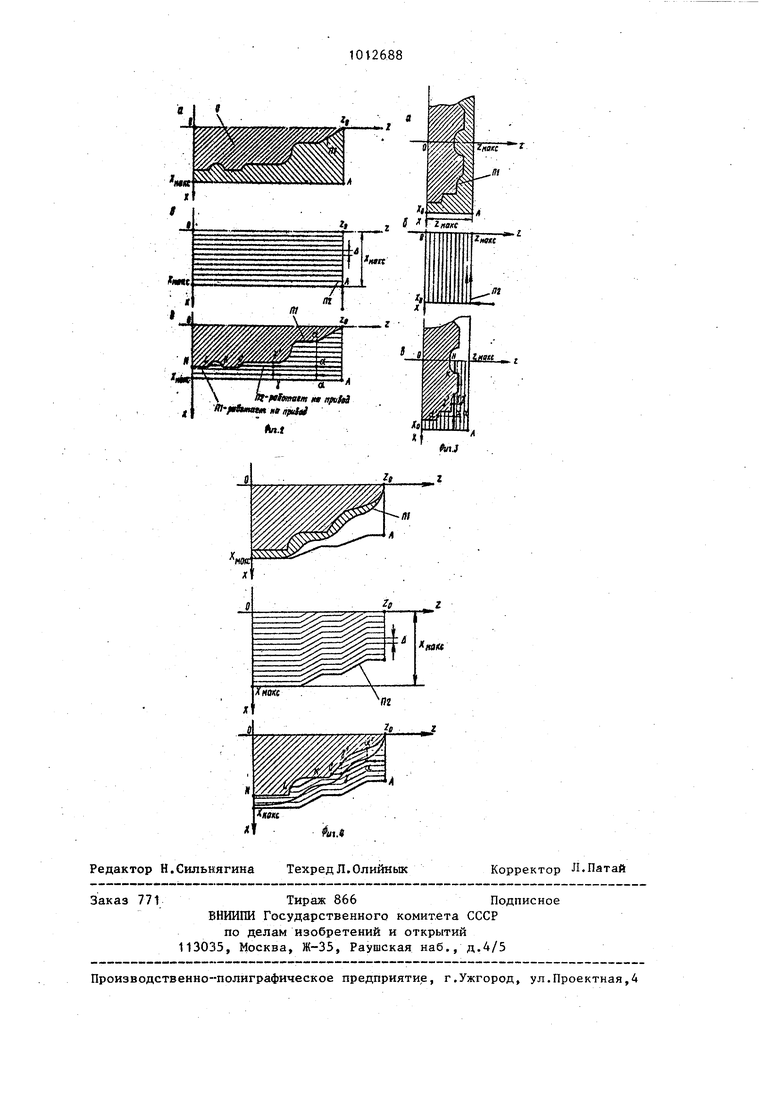
0 усложняет конструкцию вводного устройства (требуются фотосчитывающие устройства с катушками) и понижается надежность комплекса в целом, так как считывание информации с перфоленты является самым ненадежным процессом преобразования информации в системе Ч11У. Отсюда ненадежность устройства и сложность отладки программ. Наиболее близким техническим решением к данному изобретению является устройство для программного управления, содержащее взаимосвязанные блок ввода программы, интерполятор и блок задания скорости, а также блок циклов с памятью и специальные блоки управления. В таком устройстве с целью снижения объема вводимой инфор(4ации отдельные переходы программируются с использованием циклов, например конуса и т.д. Однако, испол зование специальных блоков циклов и управления увеличивает стоимость си стемы и снижается ее надежность, хотя и несколько снижается объем вводимой информации. Целью изобретения является упрощение подготовки и отладки программы и упрощение устройства. Поставленная цель достигается тем, что программное задающее устройство для токарного станка с про граммным управлением, содержащее бл ки вывода информации, блок задания скорости, блок интерполяции програм мы снятия припуска первый и второй выходы которого подключены к информационным входам первого коммутатора, а третий и четвертый выходы - к информационным входам второго коммутатора, блок интерполяции программы чистовой обработки, соединенный первым и вторым выходами с информаци онными входами третьего коммутатора а третьим и четвертым выходами - с информационными входами четвертого коммутатора, содержит генератор импульсов ,задатчик ведущей координаты, элементы И, ИЛИ,, триггер, реверсивный счетчик, элемент НЕ и дешифратор, вход которого соединен с выхо дами реверсивного счетчика, а выход со входом элемента НЕ и с управляющими входами первого, второго, третьего и четвертого элементов И и третьего и четвертого коммутаторов, выход элемента НЕ подключен к управляющим входам пятого, шестого, седьмого и восьмого элементов И и первого и второго коммутаторов, первый выход задатчика ведущей координаты сое;цинен с управляющими входа ми девятого, десятого, одиннадцатого и двенадцатого элементов И, а второй выход - с управляющими входами тринадцатого, четырнадцатого, пят надцатого и шестнадцатого элементов И, входы первого элемента ИЛИ подключены к выходам седьмого и второго элементов И, а выход - к управляющему входу блока интерполяции программы снятия припуска, выходы четвертого и шестого элементов И соединены со входами второго элемента ИЛИ, а выходы третьего и пятого элементов И - со входами третьего элемента ИЛИ, выход которого и выход второго элемента ИЛИ подключены соответственно к инверсному и прямому входам триг гера, связанного прямым выходом с управляющим входом семнадцатого элемента И информационный вход которого подключен к выходу генератора импульсов, а выход - к информационным входам второго и восьмого элементов И, выход блока задания скорости подключен к информационным входа седьмого элемента И и первого элемента И, связанного выходом с первым входом четвертого элемента ИЛИ, второй вход которого подсоединен к выходу восьмого элемента И, а выход - к управляющему входу блока интерполяции программы чистовой обработки, первый выход которого соединен с первым входом пятого элемента ИЛИ, третий выход - с первым входом шестого элемента ИЛИ, второй выход - с первым входом седьмого элемента ИЛИ и с информационным входом пятнадцатого элемента И, а четвертый выход -,: с первым входом восьмого элемента ИЛИ и с информационным входом Десятого элемента И, подключенного выходом к первому входу девятого элемента ИЛИ, второй вход которого связан с выходом пятнадцатого элемента И, а выход -.с информационными входами четвертого и пятого элементов И, первь1й и третий выходы блока интерполяции програм1Фа снятия припуска соединены со вторыми входами седьмого и восьмого элементов ИЛИ соответственно, второй выход - со вторым входом пятого элемента ИЛИ и с информационным входом шестнадцатого элемента И, а четвертый выход - со вторым входом шестого элемента ИЛИ и с информационным входом девятого элемента И, подключенного выходом к первому входу десятого элемента ИЛИ второй вход которого соединен с выходог шестнадцатого элемента И, а выход с йнформавдонными входами третьего шестого элементов И, суммирующий вход реверсивного счетчика подключен к выходу одиннадцатого, а вычитающий ход - к йыходу двенадцатого элеменов ИЛИ, информационные входы двенадатого и тринадцатого элементов И оединены с выходами пятого и шестоо элементов ИЛИ соответственно, а выходы - со входами двенадцатого эл мента ИЛИ, информационные входы четырнадцатого и одиннадцатого элемен тов И соединены с выходами восьмого и седьмого элементов ИЛИ соответстве но, а выходы - со входами одиннадцатого элемента ИЛИ, причем выходы первого, второго, третьего и четвер того коммутаторов подключены ко вхо дам соответствующих блоков вывода информации. На фиг.1 изображена функциональная схема устройства; на фиг.2, 3, 4 - процесс подготовки программы и работа устройства в трех различных режимах. Устройство (фит.1) содержит блок 1 задания скорости, первый элемент И 2, четвертый элемент ИЛИ 3, блок интерполяции программы чистовой обработки, блок 5 интерполяции программы снятия припуска, первый элемент Или 6, седьмой элемент И 7, (пятый 8, шестой 9, восьмой 10 и седьмой 1Т элементы ИЛИ, двенадцаты 12, тринадцатый 13, четырнадцатый 14 и одиннадцатый 15 элементы И,две надцатый 16 и одиннадцатый 17 элементы ИЛИ, реверсивный счетчик 18, дешифратор 19, элемент НЕ 20, третий 21, четвертый 22, первый 23 н второй 24 коммутаторы, элементы ИЛИ 25, 26, пятнадцатый 27, десятый 28, шестнадцатый 29, девятый 30, вт рой 31, седьмой 32, третий 33, шесто 34, четвертый 35, пятый 36 и семнадцатый 37 элементы И, второй 38, третий 39, десятый 40 и девятый 41 элементы ИЛИ, триггер 42, генератор 43 импульсов, блоки 44 и 45 управления приводами, задатчик 46 ведущей координаты и блоки 47 и 48 вывода информации. Устройство работает следующим образом. Предварительно программа обработки чистового прохода вводится в оперативное запоминакяцее устройство или вставляется в виде перфоленты в фото считЫвающее устройство блока 4, а программа снятия припуска вводится соответственно в оперативное запоминающее устройство или вставляется в виде перфоленты в фотосчитывающее .устройство блока 5, задатчик 46 устанавливается в положение Z или X g Если в качестве ведущей координаты выбрана координата X, что соответствует фиг.З, то в счетчик 18 заносится величина Z. Б случае, если в качестве ведущей координаты выбрана координата Z, что соответствует фиг.2,4, то в счетчик 18 заносится величина X код подачи F заносится в блок 1. После этого инструмент выводится в исходную точку А. Затем включается в работу блок 5, причем, так как счетчик 18 находится в состоянии больше нуля, на выходе дешифратора 19 имеется нулевой сигнал, который закрывает элемент И 2, а через элемент НЕ 20 - элементы И 7, 32, 34, 36 и коммутаторы 23,24. Благодаря этому выходы координаты ±Х, ±Z блока 5 через элементы 25, 26 оказываются подключенными ко входам блоков 44, 45. Выход блока 1 задания скорости через элемент 7 И и элемент 6 ИЛИ оказывается подключенным ко входу блока 5. Таким образом, выходные импульсы блока 1, частота которых равна заданной подаче F, поступают на вход аргумента элемента ИЛИ 6, который начинает отрабатывать программу снятия припуска. Пусть, как это показано на фиг.4, задатчик 46 ведущей координаты находится в положении Z , т.е. ведущей является координата Z, что соответствует фиг.2, 4. Тогда выходные сигналы координаты -Z, задатчика 46 и элемента 40 ИЛИ поступят на входы элементов 33, 34 И. Но элемент 33 И закрыт, так как счетчик 18 находится в состоянии меньше нуля в то время, как элемент 34 И открыт выходным сигналом элемента 20 НЕ. Поэтому выходной импульс координаты - Z блока 5 пройдет через элемент 34 И, элемент 38 ИЛИ и установит в единицу триггер 42, при этом единичный выход триггера 42 откроет элемент 37 И и импульсы высокой частоты с выхода генератора 43, пройдя через элементы 37, 32 И и элемент 3 ИЛИ, начнут поступать на вход Аргумента блока 4. Выходные сигналы координаты t X блока 5 через элементы 8, 11 ИЛИ и элементы 12, 15 И, открытые сигналом задатчика 46 ведущей координаты, и элементы 16, 17 ИЛИ поступают на входы вычитания и слежения счетчика 18 соответственно. Одновременно, выходные импульсы координат ± X, t Z блока 5 через коммутаторы 23, 24 и элемент 25, 26 ИЛИ поступают на вх ды блоков 44, 45 и обеспечивают тем самым обработку детали по програм ме снятия припуска. С приходом импульсов высокой частоты на вход бло ка 4, он начинает отрабатывать программу чистового прохода, но его вы ходные сигналы по коЬрдинатам + X, tZ не поступают на входы блоков 44, 45, т.к. коммутаторы 21, 22 закрыты нулевым сигналом с выхода дешифратора 19. Выходные сигналы координаты ± X блока 4 через элементы 8, 11 ИЛИ, элементы 12, 15 И, элементы 16, 17 ИЛИ также поступают на соответствую щие входы счетчика 18. Первый же выходной сигнал по координате - Z блока 4; пройдя через элемент 28 И, открытый по второму входу сигналом задатчика 46, поступит на элемент . 41ИЛИ и с его выхода - на входы эл менТов 35, 36 И. Так как по второму входу открыт только элемен т 36 И, т этот импульс, пройдя через элемент 36 И и элемент 39 ИЛИ, сбросит триггер 42 в ноль и закроет элемент 37 И Прохождение импульсов высокой частоты с генератора 43 на вход аргумента блока 4 прервется до прихода следующего импульса с выхода координаты - Z .блока 5 на единичный вход триггера 42, после чего цикл повторится. Поскольку на один импульс, пришедший на единичный вход триггера 42с выхода - Z 5, приходится ровно один импульс, поступающий на нулевой вход триггера 42 с выхода координаты - Z блока 4, то очевидно, что программы снятия припуска и чистового прохода отрабатываются таКИМ образом, что координаты Z их текущих точек .постоянно совпадают (Фиг.2, 4, точки of , J, , , 9«) . Причем это всегда выполняется, пока частота генератора 43 выше выходной частоты блока 1. При этом блок 5 управляет . обработкой детали, а блок 4 как бы следит за ним по координате Z. Так продолжается до тех пор, пока счетчик 18 не придет в состояние 0. Это означает, что траектории, отрабатываемые блоками 5, 4 пересеклись (точка С, фиг.2, 4). И теперь необходимо вести обработку детали по командам, вырабатываемым 1 88 блоком 4, а элемент ИЛИ 6 должен отслеживать его работу по координате Z. Такое переключение обеспечивается появлением единичного сигнала на выходе дешифратора 19, что немедленно приводит к появлению нулевого сигнала на выходе элемента 20 НЕ. Теперь элементы 7, 32, 34, 36 И и коммутаторы 23, 24 оказываются закрытыми, а открываются элементы 2, 31, 33, 35 И и коммутаторы 21, 22. В результате выходные импульсы блока Iчерез элементы 2 И и элементы 3 ИЛИ начинают поступать на вход аргумента блока 4, который начинает работать теперь на частоте блока 1, и его выходные сигналы с выходов координат ± X, tZ через коммутаторы 21, .22 и элементы 25, 26 ИЛИ поступают на входы блоков 44, 45, обеспечивая тем самым обработку учайтка С-К. Одновременно импульсы с выходов координаты ± X блока 4 через элементы 8 ИЛИ, элемент 12 И, элементы 16 ИЛИ, IIИЛИ, 15 И, 17 ИЛИ поступают на соответствующие входы счетчика 18. В то же время каждый выходной импульс координаты - Z блока 4 через элемент 28 И, открытый сигналом Zg, с задатчика 46 через элемент 41 ИЛИ поступает на входы элементов 35 И, 36 И, из которых по управляющему входу открыт только элемент 35 И, и с его выхода через элемент/38 ИЛИ поступает на единичный вход триггера 42, Триггер 42 устанавливается в состояние l и открывает элемент И.37, в результате чего частота генератора 43 через элемент 31 И и элемент 6 ИЛИ начинает поступать на вход аргумента блока.5, Блок 5 начинает.работать на высоой частоте, но его выходные импульы не проходят на входы блоков 44, 5. Выходные импульсы по каналам +Х оступают на входы счетчика 18, а ервый же импульс по каналу - Z, ройдя через открытый сигналом заатчика 46 элементы 30 И, элемент 0 ИЛИ, элемент 33 И и элемент 39 ЛИ, сбрасьшает триггер 42 в нулевое остояние. Таким образом, обработой детали управляет теперь блок 4,. блок 5 л:ишь следит за движением нструмента по координате Z. Так будет продолжаться до тех пор пока на выходе дешифратора 19 не исчезнет сигнал ,0, что соответствует точке К (фиг.2). В результате про изойдет обратное переключение, и на участке К4 управлять обработкой детали йновь будет блок 5, а следить по координате Z блок 4, В точке 4 вновь появится сигнал 0, который произведет переключение на обработку до точки N от блока 4. После прохождения точки N управление инструментом вновь берет на себя блок 5 . Он возвращает инструмен на уровень Z по программе снятия припуска, обеспечивает врезание на следующую строку и весь описанный выше цикл повторяется до тех пор, по ка программа снятия припуска не будет отработана до конца. В случае, если задатчик 46 находится в положении Х, что соответствует выбору координаты X в качестве ведущей, фактически ничего не меняется в силу симметрии схемы, лишь в счетчик 18 первоначально заносят величину Z а не X Далее работа идет аналогично описанному Bbmie, лишь в других осях (фиг.З). Случай, изображенный на фиг.4, имеет лишь ту особенность, что деталь изготавливается не из прутка ил болванки, а из кованой или литой рациональной заготовки, поэтому программа снятия припуска, отрабатывае мая блоком 5, имеет более сложный вид, что не вносит никаких изменений в описанную выше работу устройства. Поскольку в точках перехода с траектории, управляемой блоком 4, н траекторию, управляемую блоком 5,мо гут быть некоторые зарезы и риски, то траектория чистового прохода отрабатывается со сдвигом на небольшу величину 0,1-0,5 мм, а по окончании снятия пpипycкaj как всегда в обычных системах, делают один непрерывный окончательный чистовой проход. Особенности составления программы для обработки деталей поясняются гр фически на фиг,2, 3, 4. Пусть из заготовки, например, ци линдрической формы необходимо выточить деталь, разрез которой показан в заштрихованном виде на фиг.2а как зона И, причем заготовка в плане им ет вид прямоугольника . Составим программу П1 движения резца По контуру детали. Составим также программу П2 полного стачивания заготовки путем многократного -повторения одинаковых проходов (фиг.Зб). Эти проходы выбраны параллельно оси Z с постепенным врезанием по оси X. После чего, подведя резец в точку А, включим отработку программы П2 снятия припуска и ее выходными сигналами будет управлять обработкой детали. Одновременно каждым сигналом по координате Z программы П2, которая в данном случае является ведущей, будем включать отработку программы П1 на максимальной скорости и выключать ее первым же импульсом программы П1 по координате Z,a выходные сигналы программы П1 использовать для управления станком пока не будем. Благодаря этому режущая точка инструмента, управляемого программой П2 будет двигаться по координате Z, а ее движение будет отслеживаться текущей точкой программы П1 (точки с/ ; - фиг.2в) . Если при помощи счетчика алгебраически суммировать приращения по координате X программ П1 и П2, то в тот момент, когда их сумма окажется , инструмент коснется числового контура (например, точка С на фиг.2в). Следовательно, в этот момент надо так переключить выходы программ П1 и П2, чтобы дальнейшей работой управляла программа П1, а программа П2 следила за ней по ведущей координате (в данном примере Z). Обратное переключение на управление по программе П2 снятия припуска необходимо выполнить тогда, когда сумма координатных приращений программ П1 и П2 окажется меньше макс соответствует точке К на фиг.2в. Действуя таким образом, можно обрабатывать любые детали, сведя до минимума программирование и отладку программ. Действительно, для составления программы фактически необходимо задать только контур деталиj а для составления программы снятия припуска достаточно задать , Z,, и и - глубину врезания. Все промежуточные проходы формируются автоматически во время обработки детали.
Благодаря этому объем программирования сокращается во много раз. Например для детали, изображенной на фиг.2а, программа чистового прохода составляет 9 кадров, а при обработке обычным образом она составит 61 кадр. Кроме того, отладка программы требует только уточнения технологических параметров и внесения коррекции в геометрию только чистового прохода, что сокращает трудоемкость отладки также в 10-30 раз.
| Сб | |||
| Способы подготовки программы и интерполяторы для контурных систем числового управления станками, М., Машиностроение, 1970, с.77-83 | |||
| Сб | |||
| Контурные системы числового управления и их элементы, М., Машиностроение, 1972, с.22. |
