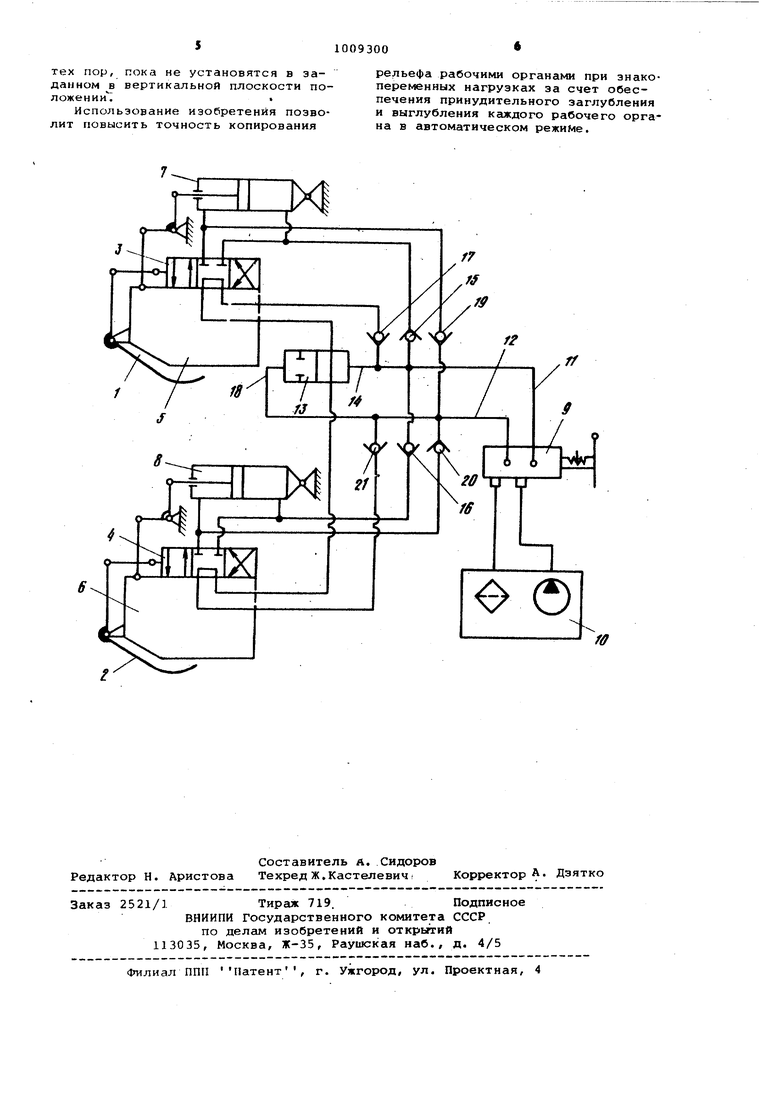
Изобретение относится к отрасли сельскохозяйственного машиностроени и может найти применение в системах автоматического регулирования положения рабочих opraiHOB мобильных сел скохозяйственных машин в вертикальной плоскости. Преимущественно изобретение может быть использовано в корнеклубнеуборочных машинах для копирования рельефа почвы выкапываю щими органами, например копачами корнеуборочной машины. Известно устройство для автомати ческого копирования рельефа почвы рабочими органами, содержащее датчики, кинематически связанные с золотниками соответствующих гидрорасп ределителей автоматического управления, плунжерные гидроцилиндры перемещения рабочих органов в вертикальной плоскости, гидрораспределитель ручного управления, источник гидравлического питания,.подводящие магистрали и дроссельные устройст а 1. Гидрораспределители автоматического, управления последовательно сое динены с напорной магистралью и снабжены дополнительными напорными полостями, параллельно подсоединенными к напорной магистрали, а также сливными полостями, парашлельно под соединенными к сливной магистрали. Недостатком известного устройства является низкая точность копирования при различных нагрузках на ра бочих органах. Это обусловлено тем, что при поступлении на два гидрораспределителя автоматического управления команды подъем с больш скоростью будет перемещаться рабочи орган, на который приходится меньшая нагрузка. Кроме того, известное устройство не обеспечивает принудительного заглубления рабочего органа. Наиболее близким по технической сущности к изобретению является устройство для автоматического копи рования рельефа почвы рабочими орга ,нами, содержащее шарнирно установленные на рабочих органах датчики, связанные посредством рычагов и тяг с золотниками гидрораспределителей автоматического управления, гидрораспределитель ручного управления, гидроцилиндры перемещения рабочих ор ганов, соединенные с управляющими каналами соответствующих гидрораспре делителей автоматического управления, источник гидравлического питания, обратные клапаны и подводящие магистрали 2 . Недостатком известного устройства является.низкая точность копирования при знакопеременных нагрузках на рабочих органах, Указанный недостаток обусловлен тем, что в известном устройстве опускание рабочих органов происходит под действием силы тяжести и реакции взаимодействия с почвой. Вместес тем, у некоторых сельскохозяйственных машин при взаимодействии рабочих органов с почвой возникает вертикальная составляющая-, противоположи :ная по направлению действию силы тяжести и изменяющаяся в процессе работы в значительных пределах в зависимости от скорости машины, плотности .почвы и глубины хода. В связи с тем, что вертикальная составляющая ;силы, направленная вверх, изменяется в процессе работы в зависимости от указанных причин/ а сила тяжести рабочих органов постоянная, даже при условии, что вертикальная составляющая, направленная вверх,будет меньше по величине, чем сила тяжести рабочих органов, скорость заглубления рабочих органов будет изменяться, так как она в :случае использования известного изобретения зависит от разности между силой тяжести рабочих органов и вертикальной составляющей, направленной вверх. Это приведет к ухудшению качества копирования рельефа рабочими органами. Целью настоящего изобретения является повышение точности копирования при знакопеременных нагрузках путем обеспечения принудительного заглубления рабочих органов. Поставленная цель достигается тем, что устройство снабжено гидроуправляемым вентилем, один Управляющий канал которого подсоединен к подводящей магистрали, связанной посредством обратных клапанов с НсЩпоршневыми полостями гидроцилиндров перемещения рабочих органов, и входным каналом гидрораспределителя автоматического управления одного из рабочих органов, а другой управляющий канал гидроуправляемого вентиля подсоединен к другой магистрали, связанной посредством обратных клапанов с подпоршневыми полостями гиДроцилиндров перемещения рабочих органов и выходным каналом гидрораспределителя автоматического управления другого рабочего органа, при этом выходной канал гиДрораспределителяавтоматического управления одного рабочего органа и входной канал другого подсоединены к гидроуправляемому вентилю. На чертеже представлена схема устройства автоматического копирования рельефа почвы рабочими органа1-ш. Устройство содержит датчики 1 и 2 и гидрораспределители автоматического управления 3 и 4 рабочих органов 5 и б с гидроцилинлрами 7 и 8 их
перемещения, предназначени1.1ми для перемещения рабочих по отношению к рс1ме машины, гидрораспределитель ручного управления 9, гидравлически связанный с источником гидравдического питания ДО и с подводящими магистралями 11 и 12, гидроуправлнемый. вентиль 13, один из управляющих каналов 14 которого подсоединен к подводящей .магистрали 11 связанной посредством обратных клапанов 15 и 16 с надпоршневыми полостями гидроцилиндров 7-и 8.перемещения рабочих органов 5 и 6, а также посредством обратного клапана 17 с входным каналом гидрораспределителя автоматического управления 3 одного из рабочих органов 5; Второй управляющий канал 18 гидроуправляёмого вентиля
13подсоединен к другой подводящей магистрали 12, связанной посредством обратных клапанов 19 и 20 с подпоршневыми полостями гидроцилиндров 7
и 8 перемещения рабочих органов 5 . и 6, а также посредством обратного клапана 21 с выходным каналом гидрораспределителя автоматического управления 4 рабочего органа 6. Причем выходной канал гидрораспределителя автоматического управления 3 и входной канал гид ораспределителя 4подсоединены к гидроуправляемому вентилю 13.
Устройство работает следующим образом.
В режиме автоматического копиревания рабочая жидкость под давлением от источника гидравлического питания 10 через гидрораспределитель ручного управления 9 поступает в магистраль 11, а магистраль 12 соединяется со сливом. В связи с наличием давления в управляющем канале
14г1олотник гидроуправляёмого вентичля 13 занимает положение, при котором .выходной канал гидрораспределителя автоматического управления 3 через вентиль 13 соединяется с входом гидрораспределителя автоматического управления 4. Обратные клапаны
15и 16 препятствуют перетеканию жидкости из магистрали 11 к гидроцилиндрам 7 и 8, а обратные клапаны
19 и 20 препятствуют перетеканию жидкости от гидроцилиндров 7 и 8 в магистраль 12, соединенную со сливом При отсутствии отклонения в вертикальной плоскости рабочих органов
5и 6 от заданного положения золотнки гидрораспределителей автоматического управления 3 и 4 находятся в нейтральном положении, и жидкость из магистрали 11 через обратный клйпан 17, гидрораспределйтель автоматического управления 3, вентиль 13, гидрораспределитель автоматического управления 4 и обратный клапан 21
оступает в магистраль 1-2 и через гидрораспределитель ручного управления 9 поступает на слив. Обе полоси гидроцилиндров 7 и 8 перекрыты гидрораспределителями автоматического управления 3 и 4 и обратными клапанами 15, 16, 19 и 20 и перег щеия. рабочих органов 5 и 6 поуотно-. ению к раме машины в вертикальной плоскости не происходит. При отклонении от Зсщанного положения сигнал от датчика поступает на соответствую- лй гидрораспределитель (наприь.ар, гидрораспределииель 3) и жидкость под давлением поступает в одну из полостей соответствующего гидроцилиндра 7, а вытесненная.жидкость из противоположной полости поступает или к другому гидрораспределителю автоматического управления 4, или непосредственно через магистраль 12 на слив.
Дл.я перевода рабочих органов устройства в транспортное положение золотник гидрораспределителя ручного управления 9 переводится в противоположное положение, жидкость от источника гидравлического питания
10поступает под давлением в магистраль 12, а магистраль 11 соединяется со сливом. При этом рабочая жидкость через управлякяций канал 18 вентиля 13 перемещает его золотник в противоположное положение и линия связи вьрсодного кангша гидрораспределйтеля автоматического управления 3 и входного канала гидрораспределителя автоматического управления 4 размыкается вен1Илем 13. Обратный клапан 21 перекрывает-доступ жидкости из магистрали 12 .к гидрораспределителю сштоматического управления 4. В подпоршневые полости гидроцилиндров 7
и 8 жидкость из магистрали 12 поступает через обратные, клапаны 19 и 20, а из противоположных йЬ тостей гидрацилиндров жидкость через обратные клапаны 15 и 16 поступает в магистраль 11 и на слив. При фиксации рабочих органов в транспортном положении золотник гид&ораспределителя ручного управления 9 устанавливается в нейтральном положении, магистрали
11и 12 запиргиотся, а взаимное в ияние гидроии ЛИН дров 7 и 8 исключается при помощи обратных.клапанов 17
и 21 и гидроуправляёмого вентиля 13. Для перевода из транспортного в рабочее положение золотник гидрораспределителя ручного управления 9 устанавливается в положение, при котором жидкость под -давлением поступает в подводящуй магистраль 11, а магистРсшь 12 соединяется со сливом. Так как от датчиков 1 и 2 на гидрораспределители автоматического управления .3 и 4 поступает сигнал опускание, рабочие органы 5 и 6 опускгдатся до
тех пор, пока не установятся в заданном в вертикальной плоскости положен
Использование изобретения позволит повысить точность копирования
рельефа рабочими органами при знакопеременных нагрузках за счет обеспечения принудительного заглубления и выглубления каждого рабочего органа в автоматическом режиме.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического поддержания заданной глубины хода рабочих органов корнеклубнеуборочной машины | 1982 |
|
SU1136756A1 |
| Устройство для автоматического копирования рельефа почвы | 1978 |
|
SU682167A1 |
| Устройство для автоматическогопОддЕРжАНия зАдАННОй глубиНыХОдА РАбОчиХ ОРгАНОВ СЕльСКО-зяйСТВЕННОй МАшиНы | 1979 |
|
SU808022A1 |
| Устройство для автоматического копирования рельефа почвы | 1972 |
|
SU467722A1 |
| Гидросистема свеклоуборочного комбайна | 1983 |
|
SU1119619A2 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1972 |
|
SU352617A1 |
| Гидросистема управления рабочим органом бульдозера | 1985 |
|
SU1240840A1 |
| Устройство управления самоходной сельскохозяйственной машиной | 1989 |
|
SU1676474A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 1971 |
|
SU307764A1 |
| Устройство для автоматического копирования рельефа почвы | 1973 |
|
SU682176A2 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ПОЧВЫ РАБОЧИМИ ОРГАНАМИ, содержащее шарнирно установленные на рабочих оргаHeix датчики, связанные посредством рычагой и тяг с золотниками гидрораспределителей автоматического управления, гидрораспределитель ручного управления, гидроцилиндры перемещения рабочих органов, соединенные с управляющими каналами соответствующих гидрораспределителей автоматического управления, источник гидравлического питания, обратные клапаны и подводящие магистрали, отличающееся тем, что, с целью повышения точности копирования при знакопеременных нагрузках путем обеспечения принудительного заглубления рабочих органов, устройство снабжено гидроуправляемым вентилем, один управлянщий канал которого подсоединен к подводящей магистрали, связанной посредством обратных клапанов с нгщпоршневыют полостями гидроцилиндров перемещения рабочих органов, и входным каналом гидрораспределителя автоматического управления одного из рабочих органов, а другоЛ управляющий канал гйдроуправляемого вентиля подсоединен к другой магистрали, связанной посредством обратных клапанов с псщпоршневыми полостями гидроцилиндров перемещения рабочих органов и выходным ка налом гидрораспределителя автоматического управления другого рабочего органа, при этом выходной канал гидрораспределителя автоматического управления одного рабочего органа и входной канал другого подсоединены к гидроуправляемому вентилю. Х) СА:)
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| УСТРОЙСТВО для АВТОМАТИЧЕСКОГО КОПИРОВАНИЯ РЕЛЬЕФА ГРЯДКИ РАБОЧИМИ АППАРАТАМИ | 0 |
|
SU307764A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для автоматического копирования рельефа почвы | 1973 |
|
SU682176A2 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
