(54) УСТРОЙСТВО ДЛЯ ПОДГОТОВКИ СТВОЛОВОГО
ОСМОЛА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНАВСЕСОЮЗНАЯnATEHTHO-TEXH^^iECri^r | 1970 |
|
SU282800A1 |
| МАШИНА ДЛЯ КОНТУРНОЙ ЧЕКАНКИ ПОБЕГОВ ВИНОГРАДНОЙ ЛОЗЫ | 2024 |
|
RU2839884C1 |
| Механизм для срезания деревьев | 1974 |
|
SU1218915A3 |
| Устройство для валки деревьев | 1977 |
|
SU646953A1 |
| СТАНОК ДЛЯ СРЕЗАНИЯ СУЧЬЕВ СО СТВОЛОВ ПОВАЛЕННЫХ ДЕРЕВЬЕВ | 1972 |
|
SU433026A1 |
| ЛЕСОЗАГОТОВИТЕЛЬНАЯ МАШИНА | 2000 |
|
RU2190321C2 |
| Лесозаготовительная машина | 1982 |
|
SU1069708A1 |
| Машина для обрезки сучьев с поваленных деревьев | 1975 |
|
SU648406A1 |
| УСТРОЙСТВО ДЛЯ ОБРЕЗКИ СУЧЬЕВ С ПАЧКИ ДЕРЕВЬЕВ | 1972 |
|
SU431009A1 |
| Пожарный мотоцикл грунтомет, дисковый кусторез, пластинчатый кусторез, гидропневматическая шина | 2020 |
|
RU2760386C2 |
1
Изобретение относится к механизмам и инструментам для заготовки ство/эвого осмольного сырья и может быть использовано в лесной промышленности.
Известны устройства для снятия коры с растущих деревьев, включающие рабочие органы для снятия коры 1J.
Однако такие устройства не обеспечивают одинаковой толщины снимаемого слоя на всей обрабатываемой поверхности. Кроме того, такие устройства недостаточно надежны в работе, обладают низкой производительностью и не обеспечивают снятие поверхностного слоя заболонной древесины.
Известно устройство для подготовки стволового осмола, включающее установленные на оси криволинейные рычаги, упорные эле.менты и ножевые браслеты, одни концы которых щарнирно связаны с криволинейными рычагами, а другие - с упорными элем нтами 2.
Однако такие устройства не могут быть использованы для снятия коры и древесины с обеспечением при этом требуемого качества обрабатываемой поверхности.
Цель изобретения - повышение качества обработки.
Поставленная цель достигается тем, что устройство снабжено управляющими браслетами, одни концы которых закреплены на упорных элементах, а другие - на криволинейных рычагах, ножевые браслеты связаны с криволинейными рычагами посредством подпружиненных рычагов и снабжены копирующими роликами, причем ножевые и управляющие браслеты каждого криволинейного рычага связаны между собой шарнирными тягами, а ножи на ножевых браслетах смонтированы шарнирно в шахматном порядке, при этом управляющие браслеты снабжены щарнирно сочлененными трубопроводами для подачи стимулятора, которые имеют с внутренних сторон браслетов отверстия, в которых смонтированы клапаны с управляющими элементами в виде роликов.
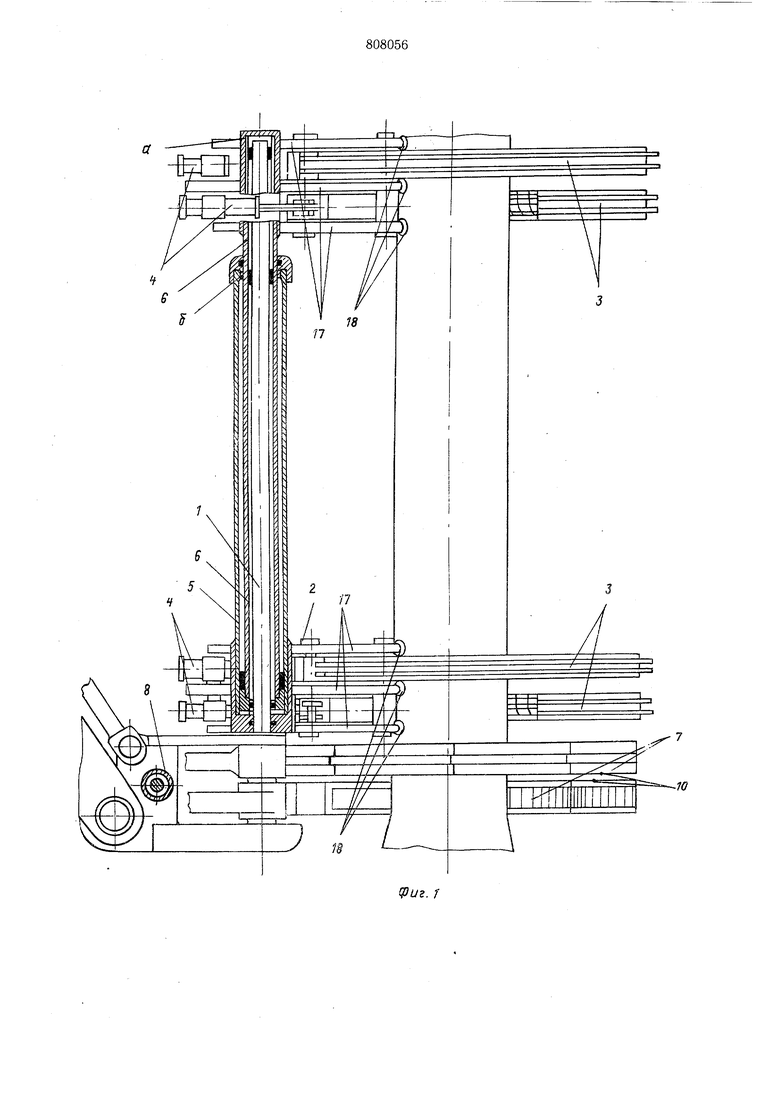
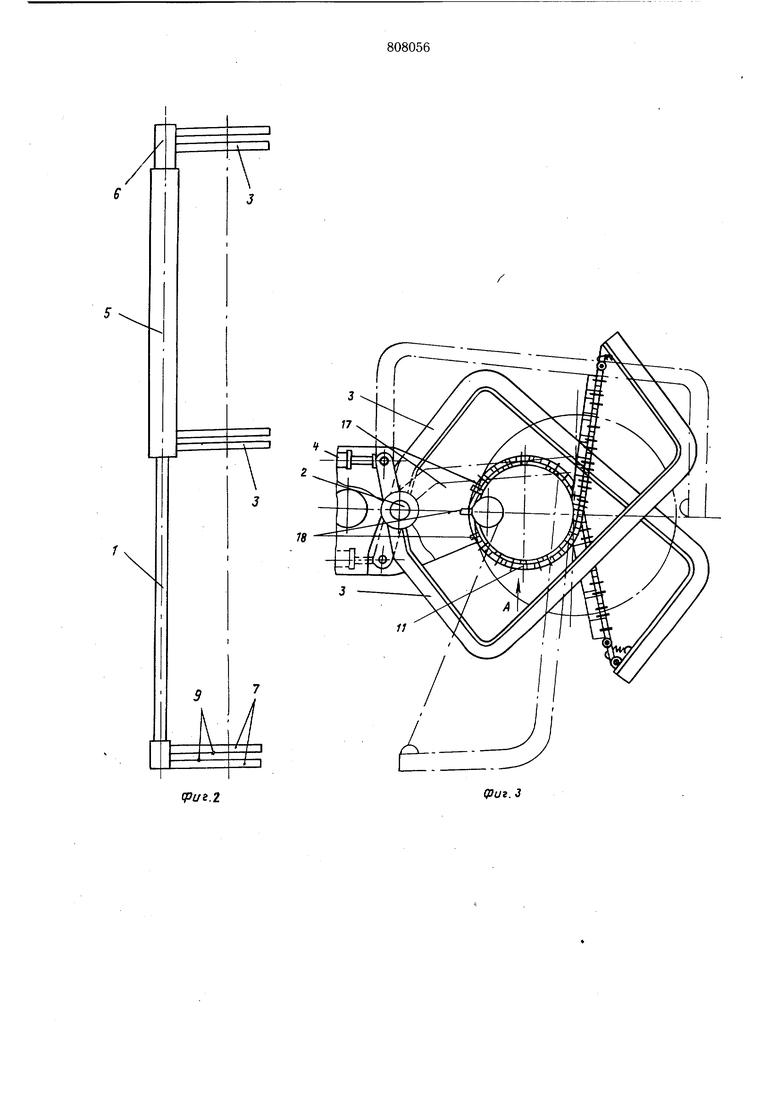
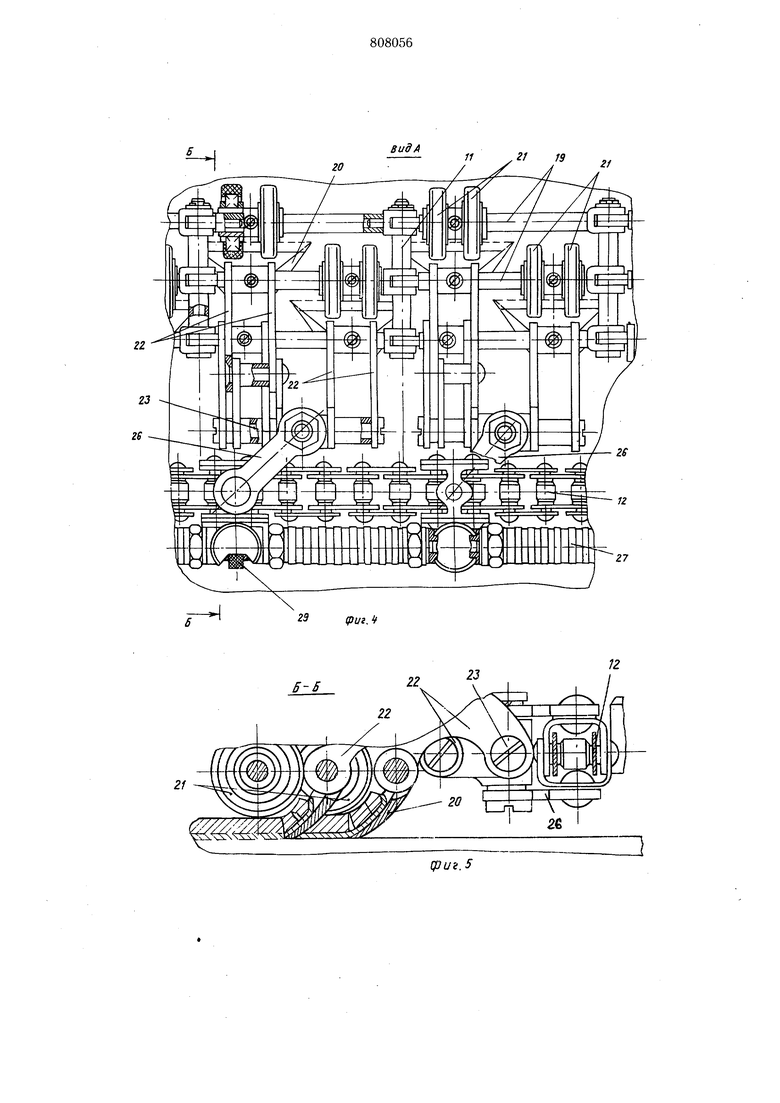
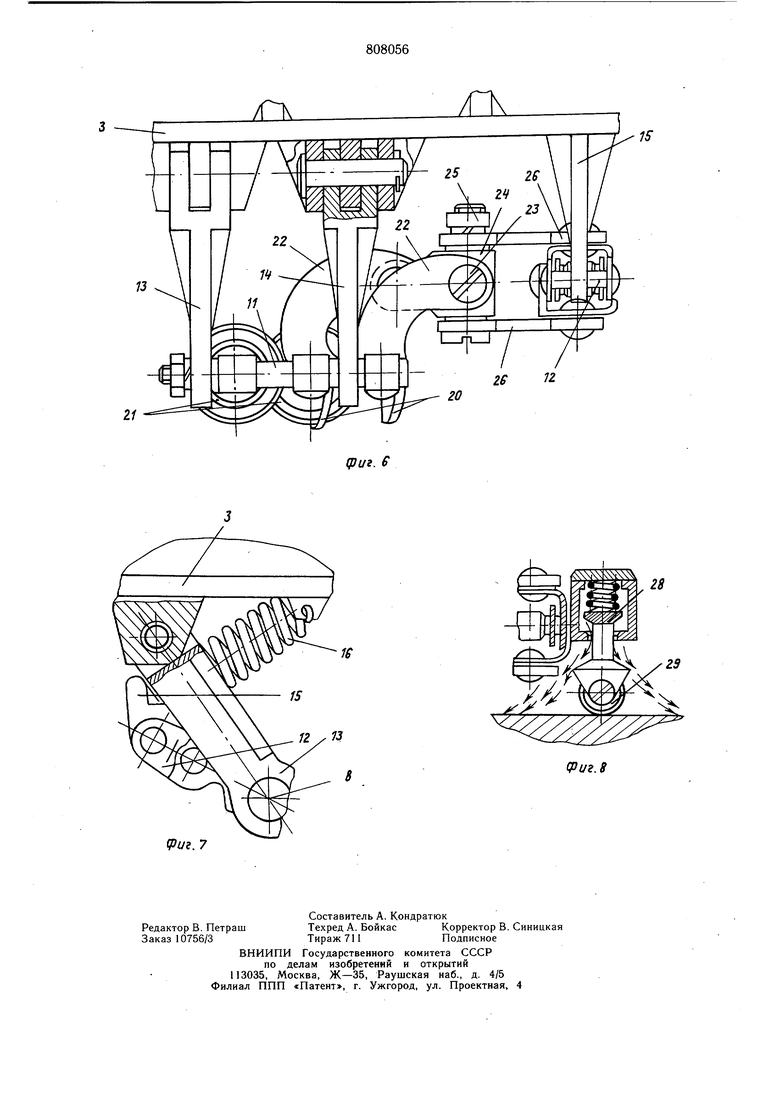
На фиг. 1 изображен рабочий орган в исходном положении, общий вид; на фиг. 2 схематично изображен рабочий орган в конечном положении; на фиг. 3 - вид сверху на криволинейные рычаги рабочего органа; на фиг. 4 - вид по стрелке А на фиг. 3; на фиг. 5 - разрез Б-Б на фиг. 4; на фиг. 6 - свободный конец криволинейного рычага до прижатия его к дереву; на фиг. 7 - конец криволинейного рычага в период работы, вид сбоку; на фиг. 8 - клапан для подачи стимулятора. Устройство для подготовки стволового осмола включает в себя механизм перемещения вдоль ствола дерева, который выполнен в виде телескопического гидроцилиндра. Неподвижный шток 1 этого гидроцилиндра представляет собой продольный стержень, один ко.нец которс/го жестко закреплен на манипуляторе, смонтированном на самоходном шасси. Механизм .1еш,ения ствола дерева включает шарнирно связанные общей осью 2 криволинейные рычаги 3, расположенные симметрично, вогнутыми поверхностями навстречу друг другу в плоскости, перпендикулярнои линии действия механизма переMenj,eHHH. Рычаги 3 могут охватить обрабатываемое дерево с перекрытием посредством гидроцилиндров 4. Рычаги 3 попарно установлены соответственно на нижнем конце внешней подвижной секции 5 телескопического гидроцилиндра и на верхнем конце внутренней секции 6 этого гидроцилиндра. Соосно с рычагами 3 на манипуляторе шарнирно установлены удерживающие челюсти 7, которые могут поворачиваться и захватывать дерево с перекрытием посредством гидроцилиндра 8. На смежных гранях 9 этих челюстей жестко закреплены ножи 10. На каждом из рычагов 3 установлены ножевые 11 и управляющие 12 браслеты, Браслеты одними концами шарнирно посажены на рычагах 13, 14, 15, которые в одной плоскости закреплены на свободных концах каждого из рычагов 3. Рычаги 13, 14, несущие ножевые браслеты 11, закреплены на рычагах 3 шарнирно и относительно них подпружинены пружинами 16, а ры.чаги 15 с управляющими браслетами .12 закреплены на концах рычагов 3 неподвижно. В непосредственной близости от рычагов 3 в плоскости их симметрии на секциях 5 и 6 телескопического гидроцилиндра установлены упорные элементы 17, которые со стороны контакта с обрабатываемым деревом снабжены роликами 18. На упорных эле.ментах 17, закреплены вторые концы брас.четов 11 и 12. Ножевые браслеты собраны из секций, кажлтая из которых имеет несколько продольных, параллельных между собой осей 19, и па этих осях шарнирно, в шахматном порядке установлены поворотные ножи 20 с перекрытием режущих кромок смежных между собой ножей. Кроме того, на осях свободно одеты и установлены перед каждым поворотным ножо.м 20 копирующие рОлики 21. Поворотные ножи 20 снабжены неподвижно закрепленными на них рычагами 22. Концы рычагов 22 у ножей каждой секции свободно одеты на общую для них, параллельную по отношению к секции ось 23, на которую свободно посажена втулка 24 с закрепленными на ней перпендикулярно этой оси стержнями 25. На стержнях 25 шарнирно установлены тяги 26, которые в свою очередь шарнирно закреплены на соответствующих секциях управляющего браслета 12. Длина каждого ножевого браслета 11 соответствует половине длины окружности максимального обрабатываемого дерева. Каждый управляющий браслет 12 имеет длину несколько большую, чем ножевой. На управляющих браслетах 12 по всей длине закреплены трубопроводы 27 для подачи стимулятора. На этих трубопроводах равномерно по их длине выполнены отверстия. Причем, в этих отверстиях в плоскостях захвата челюстей установлены подпружиненные клапаны 28, управляющие элементы которых выступают из трубопроводов 27 и на них установлены ролики 29. Устройство работает следующим образом. Посредством манипулятора рабочий орган опускают почти до земли и устанавливают так, чтобы неподвижный шток 1 телескопического гидроманипулятора был параллелен оси подлежащего обработке дерева, а ролики 18 упорных элементов 17 соприкасались с ним. Подается рабочая жидкость в гидроцилиндр 8, и удерживающие челюсти 7 oxвaтывaюf дерево. Закрепленные на них ножи 10 врезаются перпендикулярно оси ствола в поверхность дерева, тем самым осуществляется одновременно захват, удержание и травмирование древесины в комлевой части дерева. Далее рабочая жидкость подается в бесщтоковые полости гидроцилиндров 4. Рычаги 3 охватывают дерево и натягивают браслеты И, при этом управляющие браслеты 12 несколько ослаблены по сравнению с ножевыми браслетами 11. Ножи 20 врезаются перпендикулярно оси ствола по всей его окружности за исключением участков, охваченных упорными элементами 17. Рычаги 13 и 14 удерживаются пружинами 16 в вертикальном положении. Далее, в зависимости от диаметра обрабатываемого дерева по вторым трубопроводам бесщтоковых полостей гидроцилиндров 4 подается.рабочая жидкость под соответствующим данно.му диаметру давлением. Перемещение и натяжение браслетов 12 осуществляется путем подачи рабочей жидкости в бесщтоковые полости гидроцилиндров 4 через вторые трубопроводы наряду с подачей в первые. Так как давление жидкости, подаваемой по вторым трубопроводам, больше давления жидкости, идущей по первым трубопроводам, и усилие, создаваемое этим давлением, способно деформировать пружины 16, то эти дополнительные порции рабочей жидкости заставят посредством гидроцилиндров 4 дополнительно повернуться рычаги 3 еще на небольшой угол. Так как браслеты 11 уже были предельно натянуты ранее и закрепленные на них ножи 20 врезались в дерево, то точки шарнирной связи браслетов 11 и рычагов 13, 14 останутся на прежних местах при дополнительном повороте рычагов 3, а следовательно, и при дополнительном перемеш,ении концов этих рычагов. Укрепленные концы, перемещаясь, сожмут на соответствующую выбранному давлению дополнительной порции жидкости величину пружину 16, а также переместят и подтянут браслет 12. При этом установленные на браслете 12 тяги 26 будут поворачиваться относительно точек их шарнирного закрепления на браслете в плоскостях, параллельных касательным к поверхности дерева в этих точках. Одновременно с этим за счет перемещения концов рычагов 3 и концов браслетов 12, а также сжатия пружин 16, повернутся на соответствующий угол и рычаги 13 и 14. Следовательно,, одновременно с поворотом тяг 26 будет происходить сближение уровней браслетов 12 и 11 или, иначе говоря, браслет 12 ближе притянется к дереву и притянет к нему за собой тяги 26. Эти два движения тяг 26 (вокруг осей их поворота и параллельные самим себе перемещения к поверхности дерева) посредством их шарнирной связи через стержни 25 со втулками 24, а через них и оси 23 неотвратимо с1беспечат поворот к поверхности дерева рычагов 22, а с ними и поворотных ножей 20 на оп4)еделенный угол, и подготовят рабочий орган к срезанию с поверхности ствола дерева слоя необходимой толщины. Далее рабочая жидкость подается последовательно в полости а и б телескопического гидроцилиндра. Рычаги 3 перемещаются вдоль ствола дерева и своими ножами срезают необходимый слой с поверхности ствола. Слежение за изменением поверхности ствола осуществляется через копирующие ролики 21. Одновременно с подачей жидкости в полости телескопического гидроцилиндра оператор включает подачу стимулятора в трубопровод 27, и, так как управляющие браслеты 12 натянулись и прижали к поверхности дерева ролики 29, которые через управляющие элементы поджали пружины и открыли клапаны 28, стимулятор начнет поступать на поверхность дерева. При перемещении рычагов 3 стимулятор поступает тольКО через клапаны, контактирующие с поверхностью дерева через ролики 29. При перемещении рычагов 3 на участках, охваченных упорными элементами 17, поверхность дерева остается нетронутой. Эти нетронутые полосы служат после обработки дерева питательными ремнями. После того, как подвижные части телескопического гидроцилиндра пройдут необходимое расстояние, оператор возвращает их в исходное положение, отводит рабочий орган от обработанного дерева и подводит его к следующему. Цикл повторяется. Предлагаемое устройство обеспечивает возможность полной механизации работ по подготовке стволового осмола, что позволяет значительно повысить производительность, эффективность, а также увеличить объем работ. Формула изобретения Устройство для подготовки стволового осмола, включающее установленные на оси криволинейные рычаги, упорные элементы и ножевые браслеты, одни концы которых щарнирно связаны с криволинейными рычагами, а другие - с упорными элементами, отличающееся тем, что, с целью повышения качества обработки, устройство снабжено управляющими браслетами, одни концы которых закреплены на упорных элементах, а другие - на криволинейных рычагах, ножевые браслеты связаны с криволинейными рычагами посредством подпружиненных рычагов и снабжены копирующими роликами, причем ножевые и управляющие браслеты каждого криволинейного рычага связаны между собой щарнирными тягами, а ножи на ножевых браслетах смонтированы шарнирно в шахматном порядке, при этом управляющие браслеты снабжены шарнирно сочлененными трубопроводами для подачи стимулятора, которые имеют с внутренних сторон браслетов отверстия, в которых смонтированы клапаны с управляющими элементами в виде роликов. Источники .информации, принятые во внимание при экспертизе 1.Авторское свидетельство СССР 88350, кл. В 27 L 1/00, 1950. 2.Патент Швеции № 344900, л. В 27 L 1/00, 1972 (прототип). 2Эspui. f 11 ,21
фиг.5 J9
