(54) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлическая следящая система | 1980 |
|
SU937796A1 |
| Электрогидравлический следящий привод | 1983 |
|
SU1134809A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2001 |
|
RU2220431C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1513245A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
1
Изобретение относится к электрогидроавтоматике, в частности к устройствам с коррекцией динамических характеристик, и может быть использовано в электрогидравличёских следящих приводах различных машин.
Известна электрогидравлическая следящая система, содержеа ая последовательно соединенные блок управления, гидроусилитель и исполнительный пидродвигатель с инерционной нагрузкой, снабженный датчиками перепада давлений и перемещения, связанными со входом гидроусилителя 1
Недостатками этой системы является недостаточный диапазон регулирован1 я в силу малой эффективности работы при увеличении уровня возмущающего воздействия, а также возможность эозникновения автоколебаний при совпадении собственной частоты привода с частотой собственных колебаний цепи управления.
Цель изобретения - расширение диапазона регулирования и повышение устойчивости.
Указанная цель достигается тем, что система снабжена сравнивающим устройством, блоком измерения частоты и автоматически регулируемым
фильтром, при.этом первое подключено входами к датчику перепада и блоку управления, а выходами - к гидроусилителю и через блок измерения частоты, связанный с датчиком перепаду и автоматически регулируемый фильтр, к датчику перемещения.
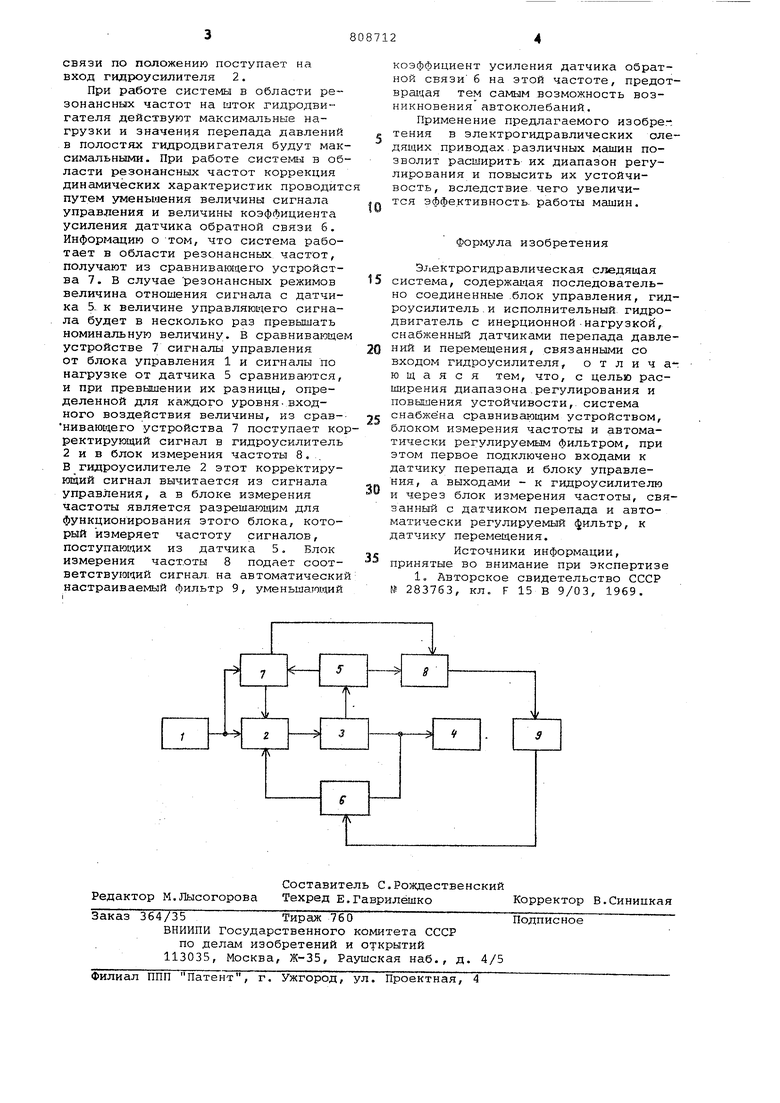
На чертеже изображена электрогидравлическая следящая система.
Система содержит, последовательно соединенные блок управления 1, гидроусилитель 2, гидродвигатель 3 с инерционной.нагрузкой 4, снабженный датчиками перепада 5 и перемещения 6. При этом сравниваинчее устройство 7 подключено входами к датчику 5 и блоку управления 1, а выходами - к гидроусилителю 2, и
через блок- измерения частоты 8 и фильтр 9 к датчику 6.
Электрогидравлическая следящая система работает следующим образом. Управляющий сигнал от блока управления 1 поступает через гидроусилитель 2 на гидродвигатель 3, который перемещает инерционную нагрузку 4. Сигнал, пропорциональный величине перемещения штока гидродвигателя 3, через датчик 6 обратной
