(5) ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ СЛЕДЯЩАЯ СИСТЕМА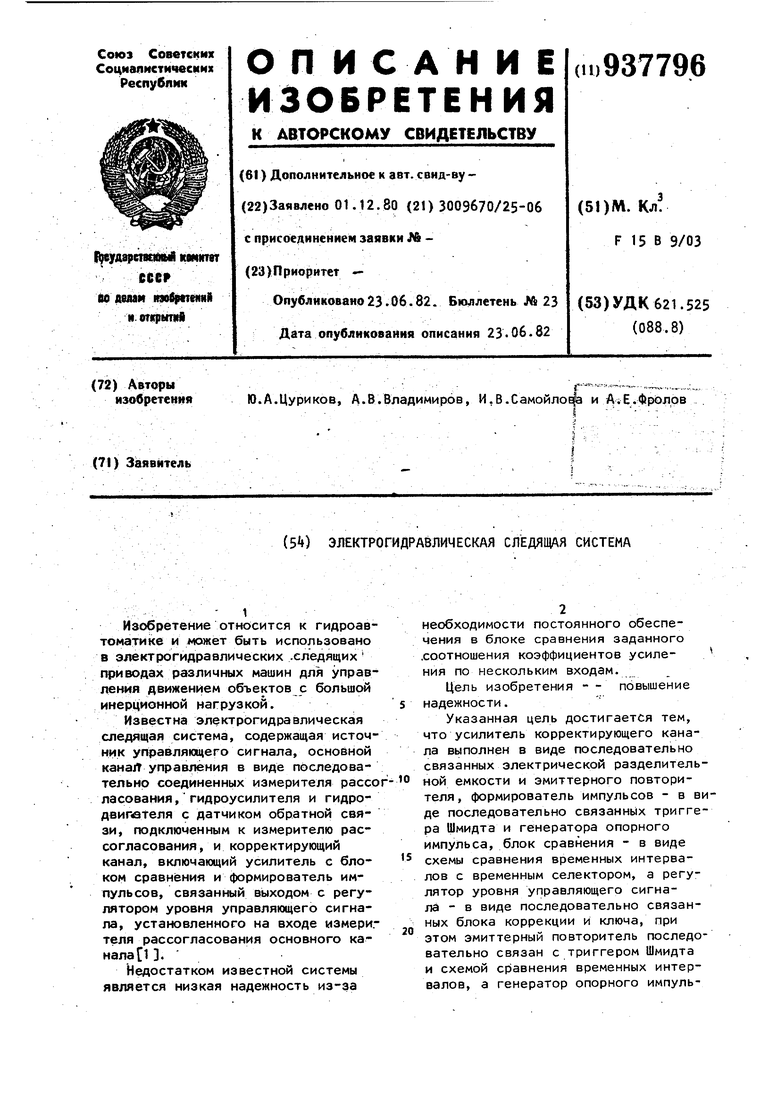

| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1983 |
|
SU1134809A1 |
| Нелинейное корректирующее устройство | 1985 |
|
SU1251022A1 |
| Электрогидравлическая следящая система | 1976 |
|
SU926379A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
| ОБЪЕДИНЕННАЯ ЭЛЕКТРОГИДРАВЛИЧЕСКАЯ,, СЛЕДЯЩАЯ СИСТЕМАi | 1972 |
|
SU332256A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД НЕПОСРЕДСТВЕННОГО УПРАВЛЕНИЯ С АДАПТИВНЫМИ СВОЙСТВАМИ | 2008 |
|
RU2368932C1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU808712A1 |
| Следящая система | 1978 |
|
SU711538A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД С НЕПОСРЕДСТВЕННЫМ УПРАВЛЕНИЕМ | 2002 |
|
RU2233464C2 |
| Резервированный электрогидравлический следящий привод | 1978 |
|
SU731082A1 |
:;.,:, , - - 1 . - Изобретение относится к гидроавтоматике и может быть использовано в электрогидравлических .следящих приводах различных машин для управления движением объектов с большой инерционной нагрузкой.
Известна электрогидравлическая следящая система, содержащая источник управляющего сигнала, основной кана/Г управления в виде последовательно соединенных измерителя рассогласования, гидроусилителя и гидродвигателя с датчиком обратной связи, подключенным к измерителю рассогласования, и корректирующий канал, включающий усилитель с блоком сравнения и формирователь импульсов, связанный выходом с регулятором уровня управляющего сигнала, установленного на входе измери.теля рассогласования основного каналаС1 .
Недостатком известной системы является низкая надежность из-за
необходимости постоянного обеспечения в блоке сравнения заданного .соотношения коэффициентов усиле- ния по нескольким входам.
Цель изобретения - повышение надежности.
Указанная цель достигается тем, что усилитель корректирующего канала выполнен в виде последовательно связанных электрической разделитель10ной емкости и эмиттерного повторителя, формирователь импульсов - в виде последовательно связанных триггера Шмидта и генератора опорного импульса, блок сравнения - в виде
15 схемы сравнения временных интервалов с временным селектором, а регулятор уровня управляющего сигнала - в виде последовательно связанных блока коррекции И ключа, при
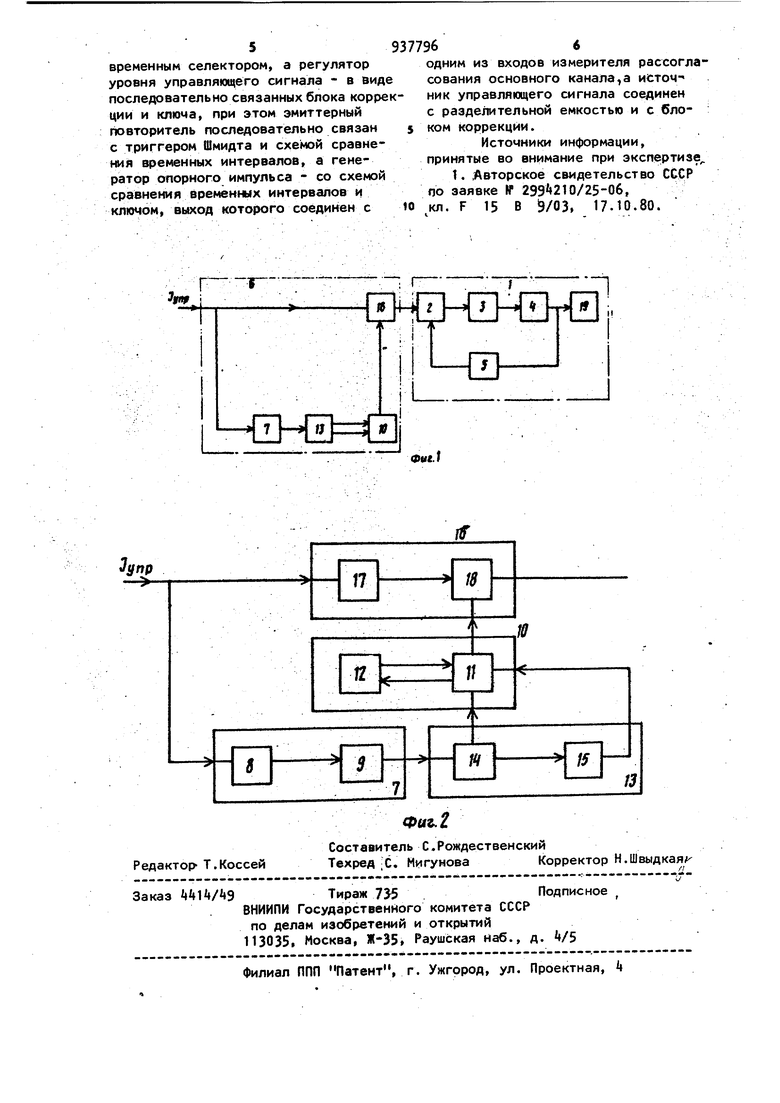
20 этом эмиттерный повторитель последовательно связан с триггером Шмидта и схемой сравнения временных интервалов, а генератор опорного импульca - CO схемой сравнения временных интервалов и ключом, выход которого соединен с одним из входов измерителя рассогласования основного канала, а источник управляющего сигнала соединен с разделительной емкостью и с блоком коррекции. На фиг. 1 изображена схема элект рогидравлической следящей системы, на фиг. 2 - схема корректирующего канала. Электрогидравлическая следящая система содержит источник управляющего сигнала не изображен), основной канал 1 в виде последовательно соединенных измерителя рассогласования 2, гидроусилителя 3, гидродви гателя k с датчиком 5 обратной связ подключенным к измерителю рассоглас вания 2, и корректирующий канал 6, включающий усилитель 7, выполненный в виде последовательно связанных электрической разделительной, емкости 8 и эмиттерного повторителя 9 блок сравнения 10 в виде схемы 11 сравнения временных интервалов с вр менным селектором 12, формирователь импульсов 13 в виде последовательно связанных триггера Шмидта 1 и гене ратора опорного импульса 15 и регулятор уровня 16 управляющего сигнала в виде последовательно связанных блока коррекции 17 и ключа 18. Гидродвигатель Ц связан с объектом регулирования 19. Эмиттерный повтор тель 9 последовательно связан с три гером Шмидта Н и схемой 11 сравнения временных интервалов, а генератор 15 опорного импульса - со схемой 11 сравнения временных интервалов и ключом 18, выход которого соединен с одним из входов измерителя рассогласования 2, а источник управляющего сигнала соединен с раз делительной емкостью 8 и с блоком коррекции 17. Электрогидравлическая система ра ботает следующим образом. Ток управления 3.fj«OT источника управляющего сигнала поступает на вх основного и корректирующего каналов 1 и 6. В зависимости от его амплитуды в формироват«2ле импульсов 13 формируются импульсы в полпериод основной частоты тока управления Cj и длительностью в поппериода эталон ной частоты til . В блоке сравнения 10 сравниваются длительности импуль сов f и и и при условии С, ко9манда В регулятор уровня 16 на корректировку сигнала не подается. При работе системы в области частот, в которой расположена собственная частота кинематической цепи гидроусилитель-гидродвигатель, т.е. при t $ fij -включается блок коррекции 17 иД шунтируется. Таким образом, уменьшается величина Оурр в основном канале 1 системы. Уменьшение тока управления приводит к уменьшению амплитуды собственных колебаний объекта регулирования 19, ив том случае, когда величина этой амплитуды уменьшается до допустимой, коррекция прекрацается. Если сигнал от формирователя импульсов 13 в блок сравнения 10 не поступает в течение определенного времени, а также, если в течение этого времени не подтвердится условие то от блока сравнения 10 на регулятор уровня 16 поступает сигнал отключения . Применение данного изобретения позволяет повысить надежность следящих приводов благодаря эффективному гашению колебаний объекта регулирования, что обеспечивает предотвращение резонансных явлений. формула изобретения Электрогидравлическая следящая система, содержащая источник управляющего сигнала, основной канал управления в виде последовательно соединенных измерителя рассогласования, гидроусилителя и гидродвигателя с датчиком обратной связи, подключенным к измерителю рассогласования, и корректирующий канал, включающий усилитель с блоком сравнения и формирователь импульсов, связанный выходом с регулятором уровня управляющего сигнала, установленного на входе измерителя рассогласования основного канала, отличающаяся тем, что, с целью повышения надежности, усилитель корректирующего канала выполнен в виде последовательно связанных электрической разделительной емкости и эмиттерного повторителя, формирователь импульсов - в виде последовательно связанных триггера Шмидта и генератора опорного импульса, блок сравнения - в виде схемы сравнения временных интервалов с
временным селектором, а регулятор уровня управляющего сигнала - в виде последовательно связанных блока коррекции и ключа, при этом эмиттерный повторитель последовательно связан с триггером Шмидта и схемой сравнения временных интервалов, а генератор опорного импульса - со схемой сравнек1 я временных интервалов и ключом, выход которого соединен с
одним из входов измерителя рассогласования основного канала,а источ-« ник управляющего сигнала соединен с раздехмтельной емкостью и с блоком коррекции.
Источники информации, принятые во внимание при экспертизе
