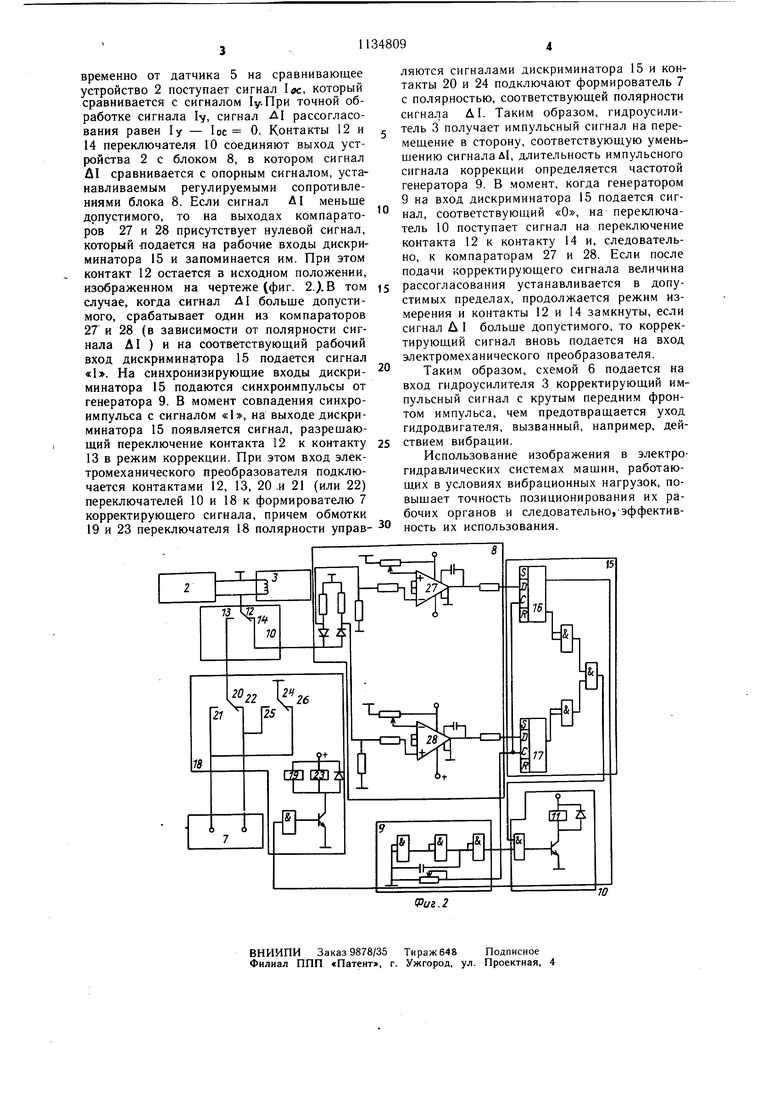
Изобретение относится к гидроавтоматике и может быть использовано в электрогидравлических системах различных машин, работающих в условиях вибрационных нагрузок. Известен электрогидравлический следящий привод, содержащий последовательно соединенные задатчик, постоянное сравнивающее устройство, гидроусилитель с электромеханическим преобразователем на входе и исполнительный гидродвигатель с датчиком обратной связи, подключенным к постоянному сравнивающему устройству, а также схему коррекции 1. Недостаток данного привода - низкая точность позиционирования из-за выполнения схемы коррекции с дополнительными датчиками, требующими совместной настройки. Известен также электрогидравлический следящий привод, содержащий последовательно соединенные задатчик, постоянное сравнивающее устройство, гидроусилитель с электромеханическим преобразователем на входе и исполнительный гидродвигатель с датчиком обратной связи, подключенным к постоянному сравнивающему устройству, а также схему коррекции с формирователем корректирующего сигнала, блоком сравнения, генератором опорной частоты и переключателем режимов, имеющим реле, подвижный контакт которого подключен к выходу постоянного сравнивающего устройства и входу электромеханического преобразователя 2. Недостатком известного привода является низкая точность позиционирования при работе в условиях вибрационных нагрузок. Цель изобретения - повыщение точности позиционирования. Указанная цель достигается тем, что в электрогидравлическом следящем приводе, содержащем последовательно соединенные задатчик, постоянное сравнивающее устройство, гидроусилитель с электромеханическим преобразователем на выходе и исполнительный гидродвигатель с датчиком обратной связи, подключенным к постоянному сравнивающему устройству, а также схему коррекции с формирователем корректирующего сигнала, блоком сравнения генератором опорной частоты и переключателем режимов, имеющим реле, подвижный контакт которого подключен к выходу постоянного сравнивающего устройства и входу электромеханическогопреобразователя, схема коррекции снабжена дискриминатором полярности, имеющим два рабочих и два синхронизирующих входа и два выхода, и переключателем полярности с двумя реле, при этом блок сравнения выполнен в виде двух компараторов, каждый из которых (один прложительным входом, а другой отрицательным) связан с одним из неподвижных контактов реле переключателя режимов, обмотка реле которого подключена к генератору опорной частоты и одному из выходов дискриминатора полярности, а другой неподвижный контакт реле переключателя режимов подключен к подвижному контакту одного из реле переключателя полярности, оба реле которого попарно соединены контактами с формирователем корректирующего сигнала, а обмотками - с другим выходом дискриминатора полярности, рабочие входы которого подключены к выходам компараторов, а синхронизирующие входы - кгенератору опорной частоты. На фиг. 1 изображена блок-схема электрогидравлического следящего привода-; на фиг. 2 - схемы коррекции. Электрогидравлический следящий привод содержит последовательно соединенные задатчик 1, постоянное сравнивающее устройство 2, гидроусилитель 3 с электромеханическим преобразователем (не показан) на входе и исполнительный гидродвигатель 4 с датчиком 5 обратной связи, подключенным к сравнивающему устройству 2, а также схему 6 коррекции с формирователем 7 корректирующего сигнала, блоком 8 сравнения, генератором 9 опорной частоты и переключателем 10 режимов, имеющим реле (не показано) с обмоткой 11, подвижным контактом 12, подключенным к выходу сравнивающего устройства 2 и входу электромеханического преобразователя, и неподвижными контактами 13 и 14. Схема 6 содержит также дискриминатор 15 полярности, имеющий триггеры 16 и 17, два рабочих входа, два синхронизирующих входа и два выхода, и переключатель 18 полярности с двумя реле (не показаны), одно из которых имеет обмотку 19, подвижный контакт 20 и неподвижные контакты 21 и 22, а другое - обмотку 23, подвижный контакт 24 и неподвижные контакты 25 и 26. При этом блок 8 выполнен в виде двух компараторов 27 и 28, каждый из которых (первый положительным входом, а другой отрицательным) связан с контактом 14. Обмотка 11 подключена к генератору 9 и одному из выходов дискриминатора 15, контакт 13 подключен к контакту 20, контакты 21, 22 и 25, 26 соединены с формирователем 7, а обмотки 19 и 23 - с другим выходом дискриминатора 15, рабочие входы которого подключены к выходам компараторов 27 и 28, а синхронизирующие входы - к генератору 9. Электрогидравлический следящий привод работает следующим образом. От задатчика 1 поступает сигнал управления 1у , который отрабатывается гидроусилителем 3 и гидродвигателем 4, одно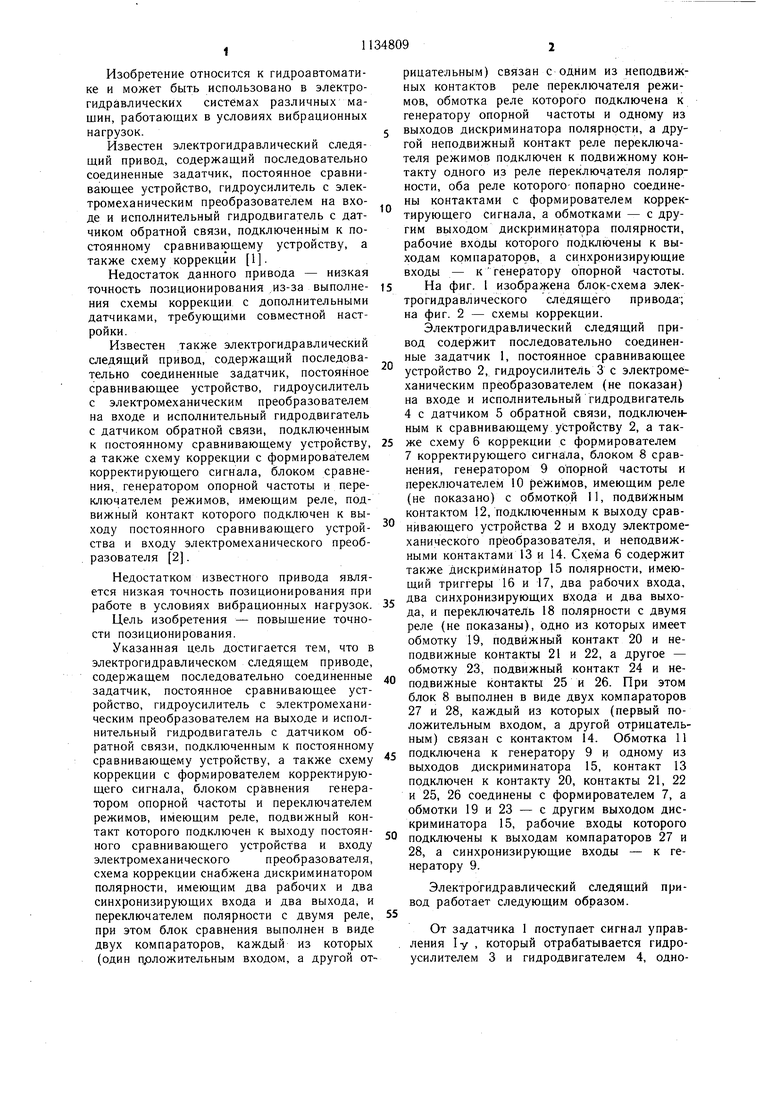
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрогидравлический следящий привод | 1987 |
|
SU1513245A1 |
| Электрогидравлическая следящая система | 1980 |
|
SU937796A1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1405024A1 |
| ГИДРАВЛИЧЕСКИЙ ИСПЫТАТЕЛЬНЫЙ СТЕНД | 1990 |
|
RU2005924C1 |
| Электрогидравлическая следящая система | 1986 |
|
SU1363133A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД ДРОССЕЛЬНОГО РЕГУЛИРОВАНИЯ | 2007 |
|
RU2347949C1 |
| Электрогидравлическая следящая система | 1984 |
|
SU1244633A2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Электрогидравлическая следящаяСиСТЕМА | 1979 |
|
SU849134A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 1990 |
|
RU2015521C1 |
ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД, содержащий после довательио соединенные задатчик, постоянное сравнивак)щее устройство, гидроусилитель с электромеханическим преобразователем на входе и исполнительный гидродвигатель с датчиком обратной связи, подключенным к постоянному сравнивающему устройству, а также схему коррекции с формирователем корректирующего сигнала, блоком сравнения, генератором опорной частоты и переключателем режимов, имеющим реле подвижный контакт которого подключен к выходу постоянного сравнивающего устройства и входу электромеханического преобразователя, отличающийся тем, что, с целью повыщения точности позиционирования, схема коррекции снабжена дискриминатором полярности, имеющим два рабочих и два синхронизирующих входа и два выхода, и переключателем полярности с двумя реле, при этом 6jloK сравнения выполнен в виде двух компараторов, каждый из которых (один положительным входом, а другой отрицательным) связан с одним из неподвижных контактов реле переключателя режимов, обмотка реле которого подключена к генератору опорной частоты и одному из входов дискриминатора полярности, а другой неподвижный контакт реле переключателя режимов подключен к подвижному контакту одного из реле переклю§ чателя полярности, оба реле Которого попарно соединены контактами с формирователем корректирующего сигнала, а обмотками - с другим выходом дискриминатора полярности, рабочие входы которого подключены к выходам компараторов, а синхронизирующие входы - к генератору опорной частоты. СО 4;: 00 о (;о
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторскоесридетельство СССР № 757777, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрогидравлическая следящая система | 1980 |
|
SU937796A1 |
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
