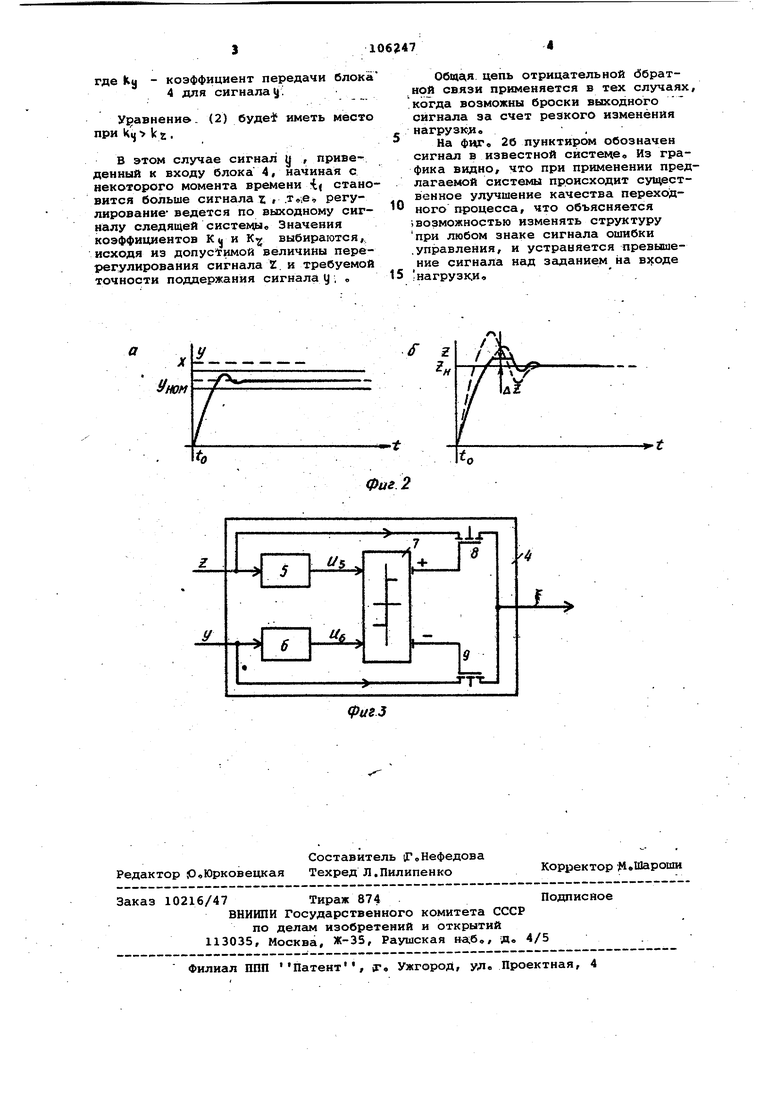
Изобретение относится к автома тике и может быть использовано при регулирований величины выходн переменных различных технологичес процессов и динамических объектов Предлагаемую систему наиболее целесообразно использовать в случаях, когда- в процессе регулирова ния недопустимо превышение сигнал подаваемого на нагрузку, выше заданного предела, Известно устройство, содержащее регулятор и нагрузку, охвачен ную цепью отрицательной обратной связи через инвертирующий вход суммирующего элемента, на один ,вход которого поступает управляю щий сигнал, а на другой - выходно сигнал системы, что позволяет изме нять коэффициент передачи отрицательной обратной связи в зависимое ти от величины ошибки управления Недостатками устройства являются перерегулирование выходной пере менной больше заданного предела пр увеличении скорости отработки и уменьшение быстродействия системы при уменьшении скорости отработки Известно устройство, содержащее последовательно соединенные задатчик сигнала, сумматор, регулятор и блок изменения структуры, подключенный выходом к инвертирующему входу сумматора , а вторым входом к входу системы, причем выход регулятора соединен с выходом систеНедостатками известного Vcтpoйства являются большие перерегулирования и колебательность пер ёходных процессов, а также переключени структуры при одном знаке сигнала ошибки управления. Цель изобретения - улучшение качества переходного процесса путем уменьшения величины перерегулирования и снижения колебательное TjH о Для достижения поставленной цели вход системы соединен с инвер тирукдцим входом сумматора, а блок изменения структуры содержит схему сравнения, два ключа и две схемы выделения абсолютного значения, подключенные своими выходами к соответству1еч1Ф1 входам схемы сравнен вход первой схемы выделения абсолютного значения подсоединен к входу первого ключа и первому входу блока изменения структуры, вход второй схемы (Выделения абсолютного значения - к входу второго ключа и второму входу блока изменения структуры, управляющие входы ключе соединены с соответствующими выходами схемы сравнения, выходы ключей подключены друг к другу и к выходу блока изменения структуры На фкГо 1 представлена блок-схема системы ; на фиг 2 - графики возможного прохождения процесса; на фцг, 3 - блок-схема блока изменения структурна., Система (фнго 1 и 3) содержит регулятор 1, нагрузку 2,.сумматор 3, блок 4 изменения структуры, схемы 5 и 6 выделения абсолютного значения, схему 7 сравнения, ключи 8 и 9, задатчик 10 сигнала. Устройство работает следующим образсдивСхемы 5 и 6 предназначены для выделения абсолютного значения сигналов у и 2 , поступающих на их входы Сигналы с выходов схем 5 и 6 ( Uj ии) в зависимости от соотношений их амплитуд переводят схему 7 сравнения (двухпозиционный релейный элемент без зоны нечувствительности и с малым гистерезисом) в одно из двух его устойчивых состояний. При этом, если UjS Ug, появляется сигнал на выходе + , если на выходе -; , Эти сигналы включают один из двух ключей 8 или 9, и на выход блока 4 начинает поступать сигнал 2 или Ij , Следящая система предназначена для поддержания выходной координаты у в соответствии с задающим сигн ом X при ограничении сигнала Д2 &7, г-гц, где 2ц номинальный сигнал на входе нагрузки, при котором поддерживается номинальная-; величина УЦ выходной переменной (, Пусть, например, в некоторый момент времениi О (фиг,2) подан сигнал XH f которому в установившемся режиме должен соответствовать сигнал Ijjj (фнг,2а;) , Установившемуся сигналу у должен соответствовать установившийся выходной сигнал регулятора T { (фНГо 26), Если быстродействие регулятора 1 больше скорости изменения выходного сигнала у, сигнал (в предположении, что статический коэффициент передачи нагрузки равен единице) будет по абсолютной величине больше сигнала У и, следовательно, выходной сигнал блока 4 имеет вид ,, (1) где - коэффициент передачи блока 4 для сигналах/ Когда сигнал (j . становится близим к номинальному сигналу выходной сигнал блока 4 имеет-вид ky.y ,,
где ku - коэффициент передачи блока 4 для сигнала j;
У авкени. (2) буде иметь место при k 2 .
В этом случае сигнал у , приведенный к входу блока 4, начиная с некоторого момента времени Ч становится больше сигналах г .T,ei, регулирование- ведется по выходному сигналу следящей систем лв Значения коэффициентов К выбираются, исходя из допустимой величины перерег улирования сигнала Z. и требуемой точности поддержания сигнала Ц , о
Общдя. цепь отрицательной ббратной связи применяется в тех случаях, когда, возможны броски выходного сигнала за счет резкого изменения нагрузк 1.,
На Фнг. 26 пунктиром обозначен сигнал в известной системе Из графика видно, что при применении предлагаемой системы происходит существенное улучшение качества переходного процесса, что объясняется возможностью изменять структуру при любом знаке сигнала ошибки .управления, и устраняется превышение сигнала над заданием на входе 5 нагрузк.Ив .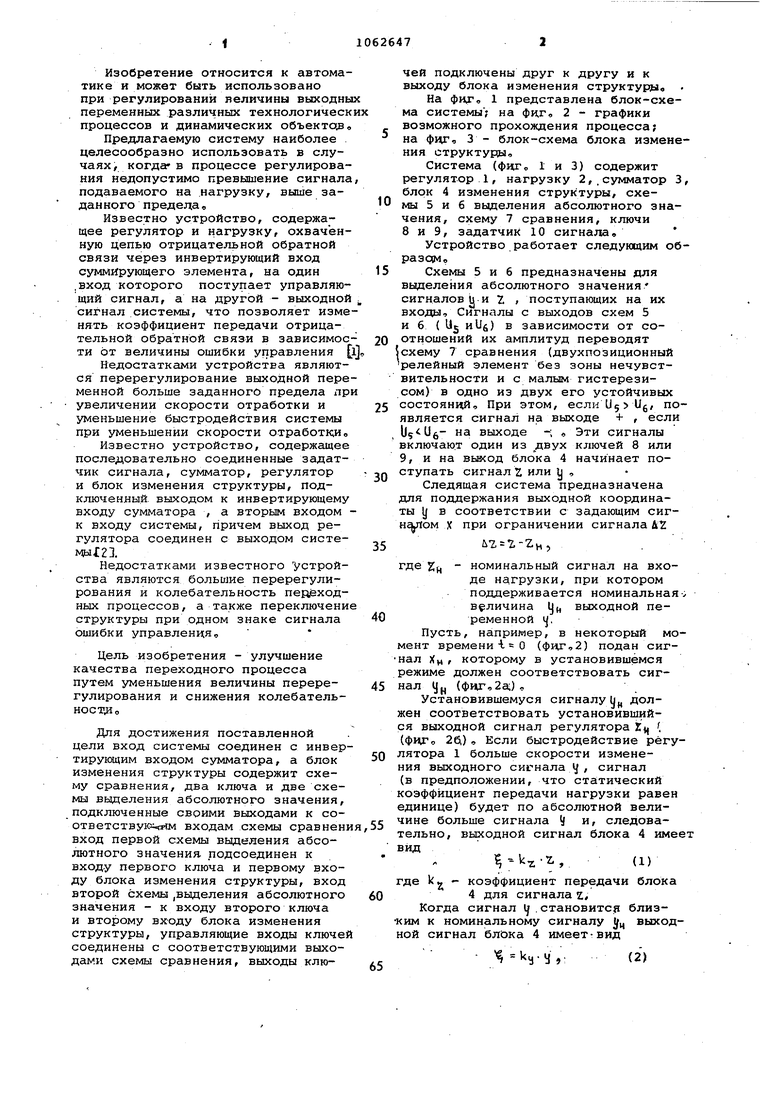
| название | год | авторы | номер документа |
|---|---|---|---|
| Релейно-импульсный регулятор | 1988 |
|
SU1644086A1 |
| Следящая система | 1989 |
|
SU1732329A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 1999 |
|
RU2150726C1 |
| СПОСОБ УПРАВЛЕНИЯ ВИНТОВЫМ МЕХАНИЗМОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1991 |
|
RU2013798C1 |
| РЕЛЕЙНЫЙ РЕГУЛЯТОР | 2008 |
|
RU2403607C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ КОМПЕНСАЦИИ ВЛИЯНИЯ ГАРМОНИЧЕСКИХ КОЛЕБАНИЙ МОМЕНТА НАГРУЗКИ В ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЕ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2014 |
|
RU2576594C1 |
| Нелинейное корректирующее устройство | 1989 |
|
SU1734070A1 |
| Следящая система | 1988 |
|
SU1529175A2 |
| Система регулирования | 1988 |
|
SU1654777A1 |
а СЛЕДЯЩАЯ СИСТЕМА С АВТОКОММУТИРУВМЬаМ КОНТУРОМ ОТРИЦАТЕЛЬНОЙ ОБРАТНОЙ СВЯЗИ, содержащая последовательно соединенные эадатчик , сигнала, сумматор, регулятор и блок изменения структуры, подклю- ченный выходом к инвертирующему входу сумматора, а вторым входом к входу системы, причем выход регулятора соединен с выходом системы . отличающаяся тем, что, V с целью улучшения качества переход-/ пого процесса за счет уменьшения величины перерегулирования и снижения колебательности вход системы соединен с инвертирующим входом сумматорДв .2 «Система по , р т л и ч а ю щ а я. с я тем, что блок изменения структуры содержит схему сравнения, два клюца и две схемы выделения абсолютного значения, подключенные своими выходами к соответствукздим входам системы сравнения, вход первой системы выделений абсолютного значения подсоединен к входу первого ключа и первому входу блока изменения структура, вход второй схемы i выделения абсолютного значения - к входу второго ключа и второму входу блока 113менен«1Я структуры, управляющие входа ключей соединены с соответствующшш выходами схемы сравнения, выходы ключей подключены-друг к ДРУГУ и к выходу блока изменения с Труктуры
-
АР/
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Попов Е.Ц | |||
| Прикладная теория процессов управления в нелинейных системарс jHe Наука, 1973, .Св496, рцс,9,32 l2e Авторское свидетельство СССР - 615455, кл G 05 В 23/02, 1978 (прототип), | |||
