Указанная цель достигается тем, то устройство рулевого управления транспортного средства снабжено дополнительным блоком сравнения и блоком суммирования, установлеинг гми в следящем приводе, гироскопическим
датчиком поворота соединительной рамы относительно неподвижной в пространстве оси, сумматорами пос ледовательных значений углов пово- рота соединительной рамы и передних и задних колес, функциональным преобразователем, включающим в себя,
сумматоры функций последовательных начений Суммарного угла поворота соединительной рамы и передних колес и считываемого угла, подключенные входами к выходам блоков изменения знака, а выходами - ко входам делителя к квадраторов, подключенных выходами ко входам блока сложения, блоком сравнения, пoдключeнны i одним из входов к выходу блока сложения функционального преобразователя, блоком постоянного коэффициента, подключенным к другому входу блока сравнения, блоками вычисления функций последовательных значений суммарного угла поворота соединительной рамы и перед™ них колес (и считываемого .угла, бликом обратных преобразований, вход которого подключен к выходу делите- ля функционального преобразователя, и ключами, управляющие входа одного и другого из которых подключены к датчику пути, сигнальные - соответственно к датчику приведенного угла поворота передних колес и гироскопическому датчику, а выходы - ко входам сумматора последовательных значений приведенных углов поворота передних колес и соединительной рамы, выход которого соединвй с задающим элементом,запоминающего узла и через блоки вычисления функций последовательных значений cs MMapHoro угла поворота соединительной раглы и передних колес входами сумматоров этих функций функционального преобразователя, выход блока сравнения соединен с приводом перемещения считывающего элемента запоминающего,зла и с управляющими входами третьего, четвертого, пятого и шестого ключей, сигнальные входы которых соединены соответственно с датчиком приведенного угла поворота заднихколес, гироскопическим датчиком, считываю- щим элементом запоминающего узла и выходом блока обратных преобразований, выходы третьего и четвертого ключей соединены с сумматором последовательных значений приведенных уг-лов поворота задних колес и соединительной рамы выход которого соединен с одним ч$из входов первого блока сравнения следящего привода, другой вход которого соединен с выходом пятого ключа, соединенным
через блоки вычисления, .функций последовательных значений считываемого угла со входами блоков изменения знака функционального преобразователя, выхсады четвертого и шестого ключей соединены со входами второго блока сравнения следящего привода, входы блока суммирования которого подключены к выходам его обоих блоков сравнения, а выход - к исполнительному механизму.
Этим достигается определение по хорде участка траектории, по которому дOJDкны перемещаться в каждый данный момент задние колеса, постоянное слежение за положением этих колес и их возвращение на требуемую тра екторию после случайного отклонения.
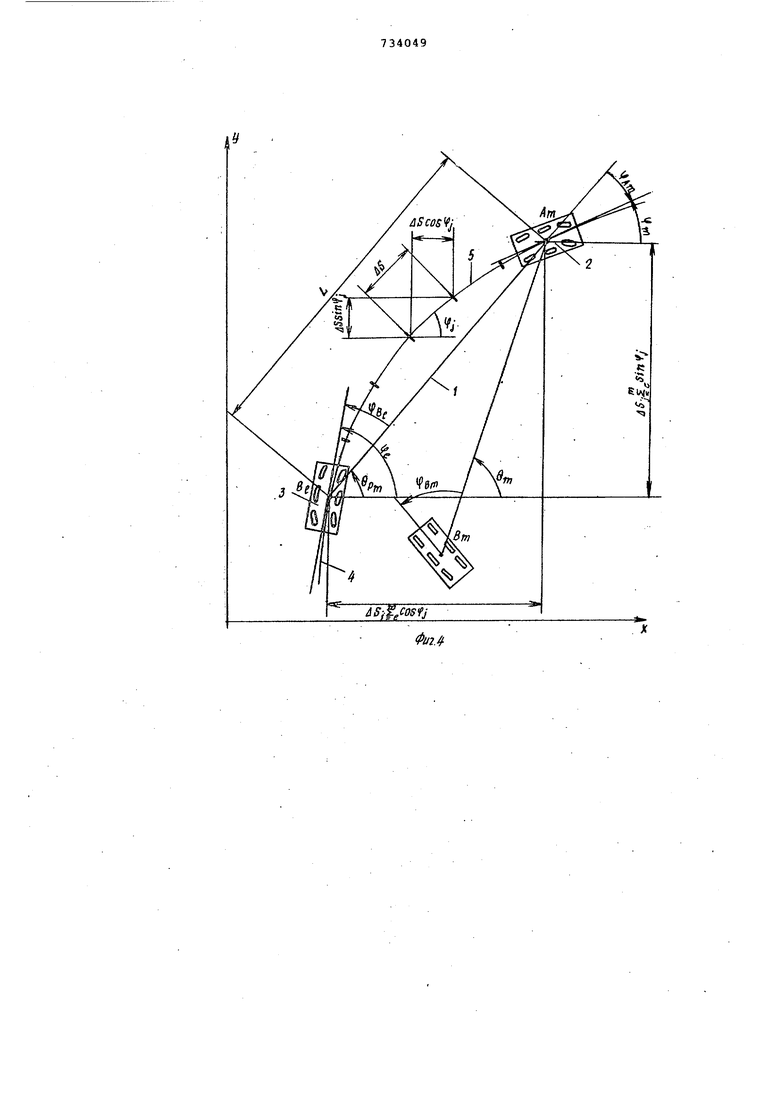
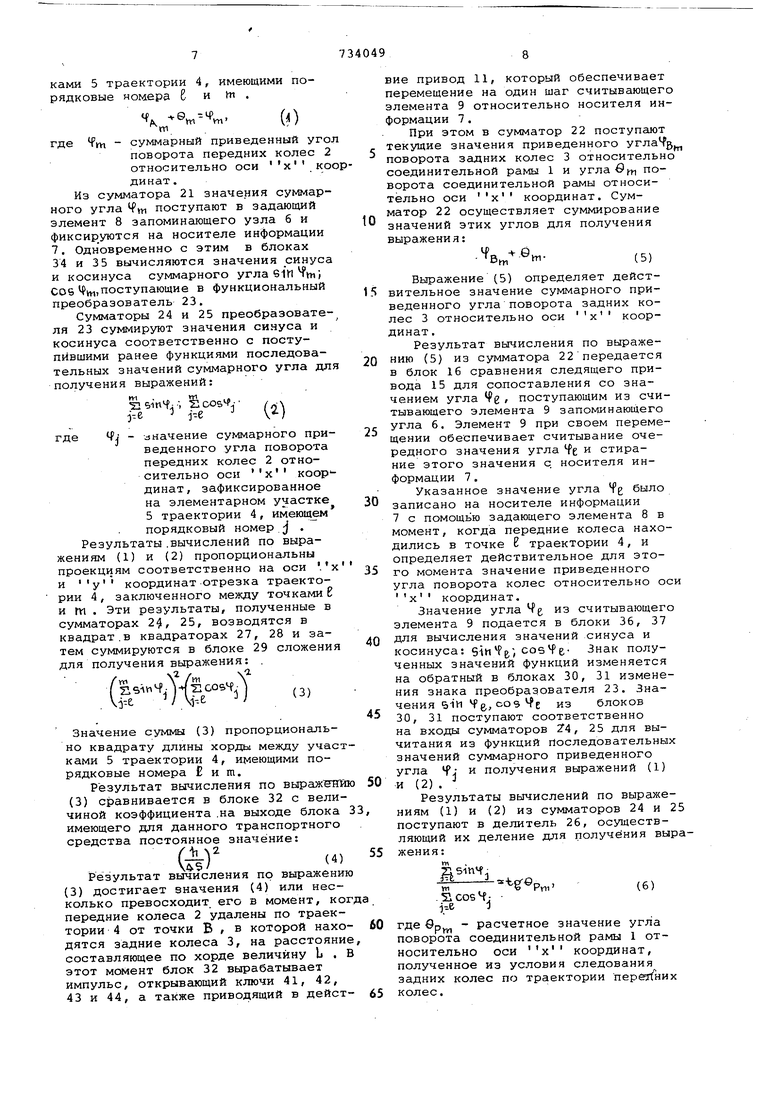
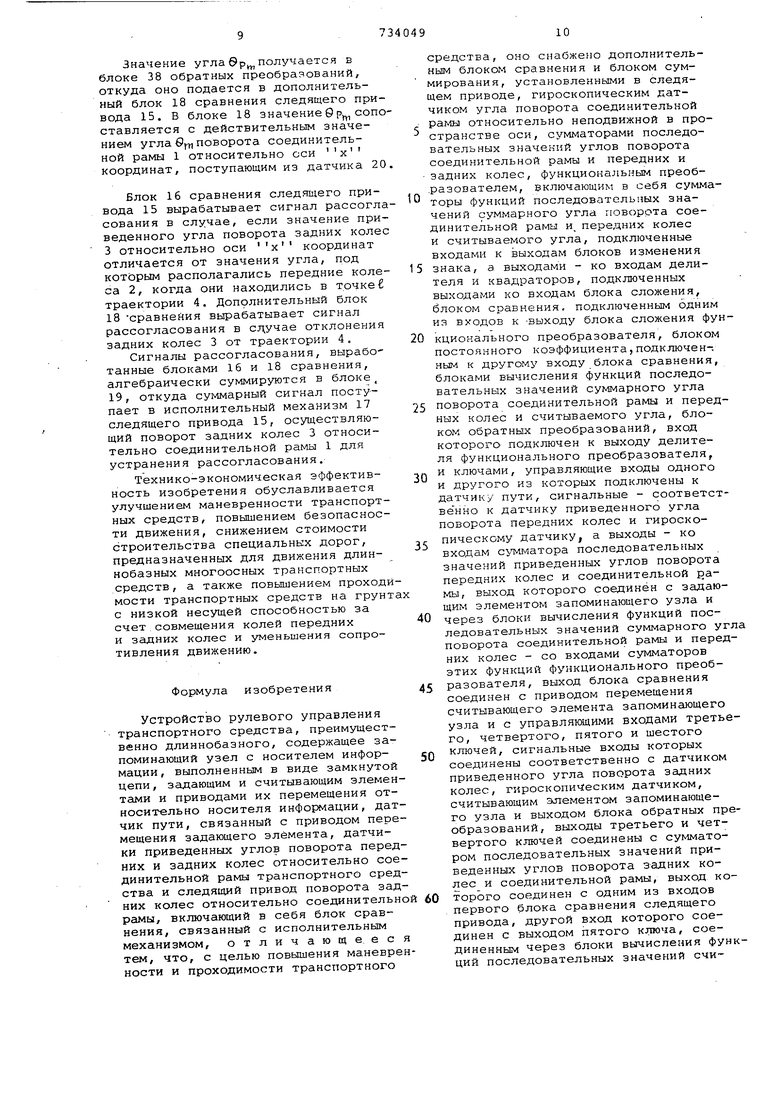
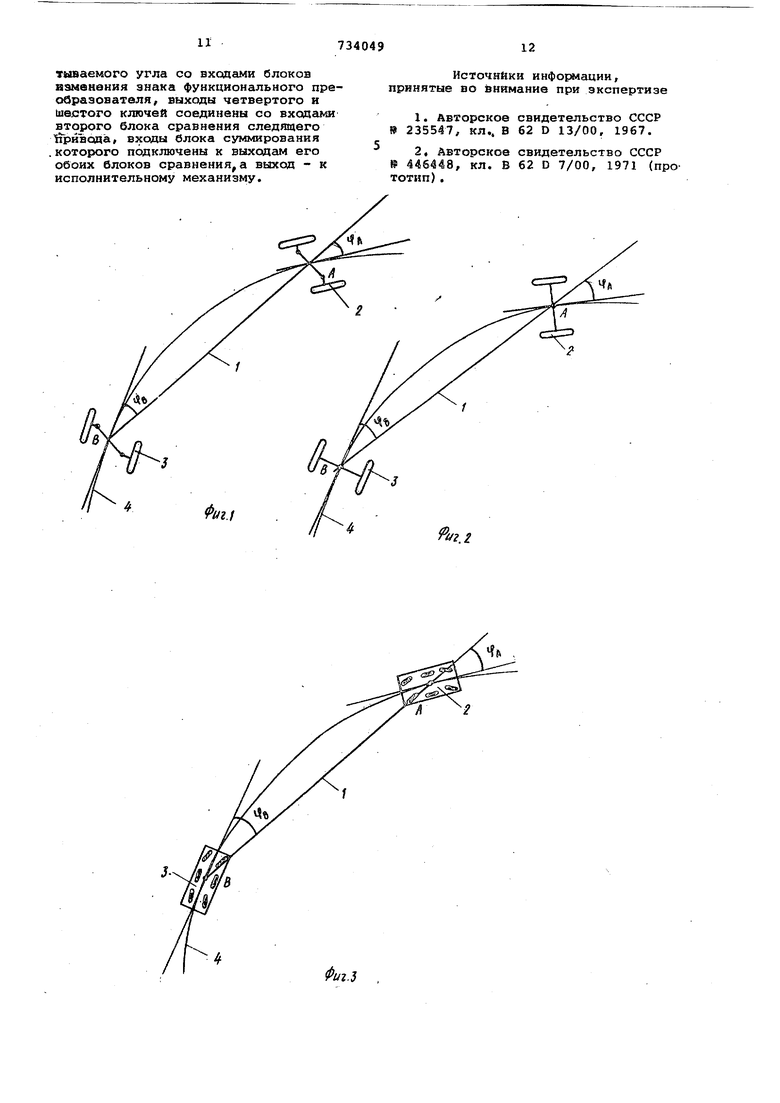
На фиг. 1 схематически показано гранспортное средство, снабженное передними и задними управляемыми колсами; на фиг. 2 схематически показан транспортное средство, снабженное передними и задними колесами, установленными на поворотных осях; на фиг. 3 схематически показано транспортное средство, снабженное передними и задними управляемыми колесами, объединенными в переднюю и заднюю поворотные тележки; на фиг. 4 схематически показано положение транспортного средства при движении передних и задних колес по одной траектории и при смещении задних колес с траектории передних; на фиг. 5 показана функциональная схема устройства рулевого управления.
Транспортное средство содержит соединительную раму 1, связанную в точках А ИВ соответственно с передними и задними управляемыми колесами 2 и 3 .
Колеса перемещаются по траектории 4, условно разбитой на ряд последовательных элементарНЕЛх участков 5, длина каждого из которых составляет величину AS. Порядковые номера участ ков 5, отсчитываемые от точки начала движени-я передних колес, обозначены индексом j . Индексами m и обначены соответственно номера элементарных участков 5 траектории 4, на которых находится передняя точка А соединительной„ а1 1ы 1 и на которых должна находиться задняя точка В этой рамы. Расстояние по хорде между участками m и равно длине L соединительной рамы 1.
В общем случае, в результате случайного отклонения, задние колеса могут находиться в точке , располоёО женной вне траектории 4 перемещения передних.колес 2 (индекс точки В определяется номерсгл участка 5 траектории 4, на котором находится в данный момент передняя точка А соединиg5 тельной рамы 1).
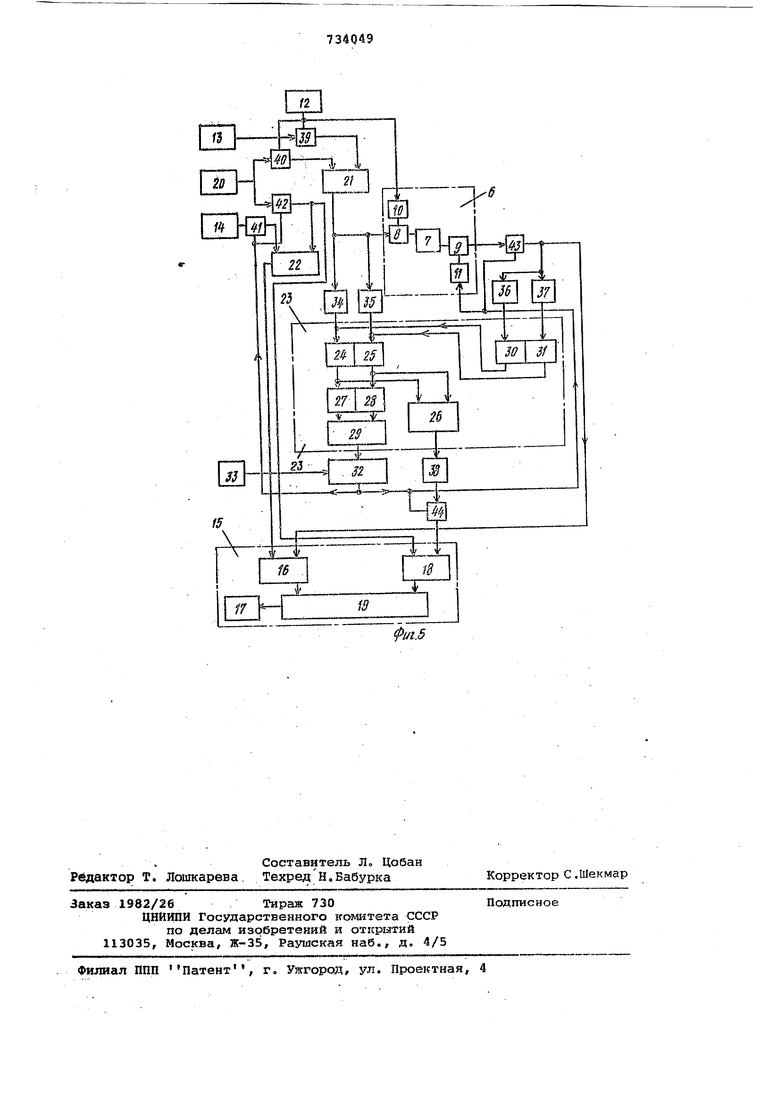
Устройство рулевого управления tpaHcnopTHoro средства -содержит запоминающий узел 6 с нпсителем информации 7, выполненным в виде замкнутой цепи, задающим 8 и считывающим 9 элементами и приводами 10, 11 перемещения этих элементов относительно носителя информации 7. Датчик 12 пути связан с приводом 10 перемещения задающего элемента 8. Датчики 13 и 14 фиксируют приведенные углы поворота соответственно передних и задних колес 2 и 3 относительно соединительной рамы 1. Следящий привод 15 предназначен для поворота задних колес 3 относительно соединительной рамы 1. Привод 15 имеет блок 16 сравнения и исполнительный механизм 17, В следящем приводе 15 установлены такжедополнительный блок 18 сравнения и блок 19 суммирования. Гироскопический датчик 20 фиксирует угол поворота соединительной рамы 1 относительно неподвижной в пространств оси х, Су(«гматоры 21 и 22 осуществляют суммирование последовательных значений углов поворота соединительной рамы 1 и прР1веденных углов поворота передних 2 и задних 3 колес
Функциональный преобразователь 23 содержит сумматоры 24 и 25 функций последовательных значений суммарноfo угла поворота .соединительной рамы 1 и передних колес 2 и считываемого угла. Делитель 26 обеспечивает деление полученных сумм, квадраторы 27 к 2В осуществляют возведение этих сумм в квадрат, а блок 29 сложения сложение полученных квадратов сумм. Блоки 30 и 31 служат для изменения на обратный знака функций последовательных значений считываемого угла
Блок 32 сравнения обеспечивает сопоставление сигнала с выхода блока 29 сложения функционального преобразователя 23 с сигналом от блока 33 постоянного коэффициента. Блоки 34, 35, 36 и 37 служат для вычисления функций синуса и косинуса последовательных значений суммарного угла поворота соединительной рамы 1 и передних колес 2 и считываемого угла
Вход блока 33 обратных преобразований соединен с выходом делителя 26 функционального преобразователя 2
Устройство содержит также ключи 39, 40, 41, 42, 43 и 44. Датчик 12 пути связан с управляющим входом ключей 39 и 40. Сигнальные входы этих ключей соединены соответственно с датчиком 13 приведенногр,угла поворота передних колес а гироскопическим датчиком 20 о Выходы ключей 39 и 40 соединены с сумматором 21 последовательных значений приведенного угла поворота передних колес 2 и угла поворота соединительной рамы 1, выход которого соединен с задакяцим элементом 6 запоминающего
узла 6 и через блоки 34 и 35 вычислв ния функций суммарного угла - с сумматорами 24, 25 этих функций функционального;преобразователя 23. Выход блока 32 сравнения соединен с приводом 11 перемещения считывающего элемента 9 и с управляющими входами третьего ключа 41, четвертого ключа 42, пятого ключа 43 и шестого ключа 44, Сигнальные входы этих ключей соединены соответственно с датчиком 14 приведенного угла поворота задних;колес, гироскопическим датчиком 0, считывающим элементом 9 запоминающего узла 6 и выходом блока 38 обратных преобразований. Выходы . Третьего ключа 41 и четвертого ключа 42 соединены со входами сумматора 22 последовательные: значений приведенного угла- поворота задних колес 3 и угла поворота соединительной рамы 1, выход которого соединен с одним из входов блока 16 сравнения следящего привода 15 второй вход которого соединен с выходом пятого ключа 43, соединенныгд через блоки 36, 37 вычисления функций последовательных значений считываемого угла с блоками 30, 31 изменения знака функционального преобразователя 23. Выход четвертого ключа 42 соединен с первым входом дополнительного блока 18 сравнения следящего привода 15, второй вход которого соединен с выходом шестого ключа 44, Выходы блоков 16 и 18 сравнения следящего привода 15 соединены с исполнительным механизмом ,17 через блок 19 суммирования.
Устройство работает следующим образом,
В рассматриваемый момент --времени передняя точка А и задняя В соедини-тельной рамы 1 располагаются соответственно на элементарных участках Ш и 6 траектории 4,
При движении транспортного средства датчик 12 пути срабатывает при перемещении передних колес 2 на кажд отрезок 5 траектории 4, длина которого равна величине &9.. Импульс датчика 12открывает ключи 39 и 40, а также приводит в действие привод 10, обеспечивая перемещение на один шаг задающего элемента 8 относительно носителя информации 7, При срабатывании ключей 39 и 40 в сумматор 21 от датчиков 13 и 20 поступают текущие значения приведенного угла , поворота передних колес 2 относительно соединительной рамы 1 и
угла 6 поворота соединительной рамы относительно х координат, который:осуществляет суммирование последовательных значений указанных углов .для получения выражения
но квадрату длины хорды между участнами 5 траектории 4, имеющими порядковые номера 6 и In . .„-в„-™. где fm - суммарный приведенный уго поворота передних колес 2 относительно оси х ко динат. Из сумматора 21 значения суммарного угла ( поступают в задающий элемент 8 запоминающего узла б и фиксир уются на носителе информации 7. Одновременно с этим в блоках 34 и 35 вычисляются значения синуса и косинуса суммарного угла 9111 vti) COS 4 17поступающие в функциональный преобразователь 23. Сумматоры 24 и 25 преобразователя 23 суммируют значения синуса и косинуса соответственно с поступившими ранее функциями последовательных значений суммарного угла дл получения выражений: SeinH -, . /- Г-е г-е V-) где Ч./ - значение суммарного приведенного угла поворота передних колес 2 относительно оси х коор динат, зафиксированное на элементарном участке 5 траектории 4, имеющем порядковый номер j . Результаты .вычислений по выражениям (1) и (2) пропорциональны проекциям соответственно на оси .х и у координат отрезка траектории 4, заключенного между точками Б и m . Эти результаты, полученные в сумматорах 2, 25, возводятся в квадрат.в квадраторах 27, 28 и затем суммируются в блоке 29 сложени для получения выражения: . /авлу. r-i I М-- I Значение сумма (3) пропорционально квадрату длины хорды между учас ками 5 траектории 4, имеющими порядковые номера и т. Результат вычисления по выражвтш (3) сравнивается в блоке 32 с вели чиной коэффициента .на выходе блока имеющего для данного транспортного средства постоянное значение: Ш и Результат вкгаисления по выражен (3) достигает значения (4) или несколько превосходит его в момент, к передние колеса 2 удалены по траек тории 4 от точки Б , в которой нах дятся задние колеса 3, на расстоян составляющее по хорде величину Ь . этот момент блок 32 вырабатывает импульс, открывающий ключи 41, 42, 43 и 44, а также приводящий в деис вне привод 11, который обеспечивает перемещение на один шаг считывающего элемента 9 относительно носителя информации 7. При этом в сумматор 22 поступают текущие значения приведенного углаЧр поворота задних колес 3 относительно соединительной рамы 1 и угла €)( поворота соединительной рамы относительно оси х координат. Сумматор 22 осуществляет суммирование значений этих углов для получения выражения: (5) Выражение (5) определяет действительное значение суммарного приведенного угла поворота задних колес 3 относительно оси х координат. Результат вычисления по выражению (5) из сумматора 22передается в блок 16 сравнения следящего привода 15 для со.поставления со значением угла , поступающим из считывающего элемента 9 запоминающего угла 6. Элемент 9 при своем перемещении обеспечивает считывание очередного значения угла 4е и стирание этого значения с. носителя информации 7 . Указанное значение угла Hg было записано на носителе информации 7 с помощью задающего элемента 8 в момент, когда передние колеса находились в точке В траектории 4, и определяет действительное для этого момента значение приведенного угла поворота колес относительно оси х координат. Значение угла Sg из считывающего элемента 9 подается в блоки 36, 37 для вычисления значений синуса и косинуса: SittH , coefe- Знак полученных значений функций изменяется на обратный в блоках 30, 31 изменения знака преобразователя 23. Значения 51И Че,, из блоков 30, 31 поступают соответственно на входы сумматоров 4, 25 для вычитания из функций Последовательных значений суммарного приведенного угла fx и получения выражений (1) и (2) . Результаты вычислений по выражениям (1) и (2) из сумматоров 24 и 25 поступают в делитель 26, осуществляющий их деление для получения выражения:Гт-ч«.„, -Sees Ч: i-.e 1 где 0р - расчетное значение уг.па поворота соединительной рамы 1 относительно оси х координат, полученное из условия следования задних колес по траектории перет1них колес. Значение угла 9р получается в блоке 38 обратных преобразований, откуда оно подается в дополнительный блок 18 сравнения следящего при вода 15. В блоке 18 значение0р соп ставляется с действительным эначением угла 0(Т1 поворота соединительной рамы 1 относительно оси х координат, поступающим из датчика 2 Блок 16 сравнения следящего привода 15 вырабатывает сигнал рассогл сования в случае, если значение при веденного угла поворота задних коле 3 относительно оси х координат отличается от значения угла, под которым располагались передние коле са 2, когда они находились в точке С траектории 4. Дополнительный блок 18 сравнения вырабатывает сигнал рассогласования в сдучае отклонения задних колес 3 от траектории 4, Сигналы рассогласования, выработанные блоками 16 и 18 сравнения, алгебраически суммируются в блоке 19, откуда суммарный сигнал поступает в исполнительный механизм 17 следящего привода 15, осуществляющий поворот задних колес 3 относительно соединительной рамы 1 для устранения рассогласования. Технико-экономическая эффективность изобретения обуславливается улучшением маневренности транспортных средств, повышением безопасности движения, снижением стоимости строительства специальных дорог, предназначенных для движения длиннобазных многоосных транспортных средств, а также повышением проходи мости транспортных средств на грун с низкой несущей способностью за счет совмещения колей передних и задних колес и уменьшения сопротивления движению. Формула изобретения Устройство рулевого управления транспортного средства, преимущественно длиннобазного, содержащее запоминающий узел с носителем информации, выполненным в виде замкнутой цепи, задающим и считывающим элемен тами и приводами их перемещения относительно носителя информации, дат чик пути, связанный с приводом пере мещения задающего элемента, датчики приведенных углов поворота перед них и задних колес относительно сое динительной рамы транспортного сред ства и следящий привод поворота зад них колес относительно соединитель рамы, включающий в себя блок сравнения, связанный с исполнительным механизмом, отличающеес тем, что, с целью повышения маневр ности и проходимости транспортного средства, оно снабжено дополнительным блоком сравнения и блоком суммирования, установленными в следящем приводе, гироскопическим датчиком угла поворота соединительной рамы относительно неподвижной в пространстве оси, сумматорами последовательных значений углов поворота соединительной рамы и передних и задних колес, функциональным преобразователем, включающим в себя сумматоры функций последовательных значений суммарного угла поворота соединительной рамы и передних колес и считываемого угла, подключенные входами к выходам блоков изменения знака, а выходами - ко входам делителя и квадраторов, подключенных выходами ко входам блока сложения, блоком сравнения, подключенным одним из входов к ВЫХОДУ блока сложения функционального преобразователя, блоком постоянного коэффициента, подключен-, ным к другому входу блока сравнения, блоками вычисления функций последовательных значений суммарного угла поворота соединительной рамы и передных колес и считываемого угла, блоком обратных преобразований, вход которого подключен к выходу делителя функционального преобразователя, и ключами, управляющие входы одного и другого из которых подключены к датчику пути, сигнальные - соответственно к датчику приведенного угла поворота передних колес и гироскопическому датчику, а выходы - ко входам c TviMaTopa последовательных значений приведенных углов поворота передних колес и соединительной jsaмы, выход которого соединён с задающим элементом запоминающего узла и через блоки вычисления функций последовательных значений суммарного угла поворота соединительной рамы и передних колес - со входами сумматоров этих функций функционального преобразователя, выход блока сравнения соединен с приводом перемещения считывающего элемента запоминающего узла и с управляющими входами третьего, четвертого, пятого и шестого ключей, сигнальные входы которых соединены соответственно с датчиком приведенного угла поворота задних колес, гироскопическим датчиком, считывающим эотементом запоминающего узла и выходом блока обратных преобразований, выходы третьего и четвертого ключей соединены с сумматором последовательных значений приведенных углов поворота задних колес и соединительной рамы, выход которого соединен с одним из входов первого блока сравнения следящего привода, другой вход которого соединен с выходом пятого ктаача, соединенным через блоки вычисления функций последовательных значений счи
тываемого угла со входами блоков вэменания знака функционального преобразователя, выходы четвертого и Шестого ключей соединены со входами второго блока сравнения следящего трйаода, входы блока суммирования .которого подключены к выходам его обоих блоков сравнения,а выход - к исполнительному механизму.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 235547, кл.. В 62 D 13/00, 1967.
2,Авторское свидетельство СССР
№ 446448, кл. В 62 D 7/00, 1971 (прототип) .

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления транспорт-НыМ СРЕдСТВОМ | 1978 |
|
SU809076A1 |
| Устройство для управления поворотом транспортного средства | 1982 |
|
SU1093595A1 |
| Устройство для управления задними колесами транспортного средства | 1989 |
|
SU1625756A1 |
| Способ определения координат наземного колесного объекта и устройство для его осуществления | 1990 |
|
SU1818534A1 |
| Устройство для управления поворотом транспортного средства | 1983 |
|
SU1134454A2 |
| Устройство управления движением прицепных звеньев безрельсового транспортного средства | 1984 |
|
SU1318472A1 |
| СИСТЕМА ОПРЕДЕЛЕНИЯ КООРДИНАТ ТРАССЫ ПОДЗЕМНОГО ТРУБОПРОВОДА | 2010 |
|
RU2437127C1 |
| СЛЕДЯЩАЯ СИСТЕМА СОПРОВОЖДЕНИЯ ПОДВИЖНЫХ ОБЪЕКТОВ | 2008 |
|
RU2381524C1 |
| СИСТЕМА СОПРОВОЖДЕНИЯ | 2007 |
|
RU2364886C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРА, ХАРАКТЕРИЗУЮЩЕГО СОСТОЯНИЕ СИСТЕМЫ КОЛЕСО - РЕЛЬС, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2061610C1 |