МЕХАНИЗМ УПРАВЛЕНИЯ ПОДАЧЕЙ ОСНОВЫ
(54) НА ТКАЦКОМ СТАНКЕ
| название | год | авторы | номер документа |
|---|---|---|---|
| Ткацкий станок для выработки махровой ткани | 1988 |
|
SU1553581A1 |
| Ткацкий станок для выработки махровой ткани | 1990 |
|
SU1712486A1 |
| Ткацкий станок для выработки махровой ткани | 1973 |
|
SU513632A3 |
| РЕГУЛЯТОР ПОДАЧИ ПЕТЕЛЬНОЙ ОСНОВЫ НА ТКАЦКОМ СТАНКЕ | 1970 |
|
SU267503A1 |
| Ткацкий станок | 1979 |
|
SU848493A1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ПРОИЗВОДИТЕЛЬНОСТИ ТКАЦКОГО СТАНКА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2045457C1 |
| ОСНОВНЫЙ РЕГУЛЯТОР ТКАЦКОГО СТАНКА | 1991 |
|
RU2016149C1 |
| Ткацкий станок для выработки махровой ткани | 1987 |
|
SU1509441A1 |
| СПОСОБ ФОРМИРОВАНИЯ ПЛОТНЫХ ТЕХНИЧЕСКИХ ТКАНЕЙ НА БЕСЧЕЛНОЧНОМ ТКАЦКОМ СТАНКЕ | 1990 |
|
SU1697467A1 |
| Способ формирования ткани на ткацком станке | 1981 |
|
SU958532A1 |
Изобретение относится к текстильной про/мышпенности и может быть использовано для управления подачей основы на ткацких станках.
Июестен механизм управления подачей осно вы на ткацком станке, содержащий , механи-, ческий дагшк натяжения основьГс переключателем, электрически соединенным с приводом навоя (1.
Основной недостаток известного устройства - невысокое качество управления, что вызывает несогласованность подачи основы с частотой прокладывания утка и, как следствие невысокое качество вырабатываемой ткани.
Цель изобретения - повышение качества
управления.
Поставленная цель достигается тем, что механизм управления подачей основы на ткацком станке имеет датчик длительности включения привода навоя, выполненный в виде кулачка, кинематически связанного с приводом ткацкого станка и имеющего поверхность считывания, соответств)тощую заданной частоте прокладывания утка, а переключатель снабжен считывающим элементом и установлен
с возможностью взаимодействия с поверхностью считьтания кулачка.
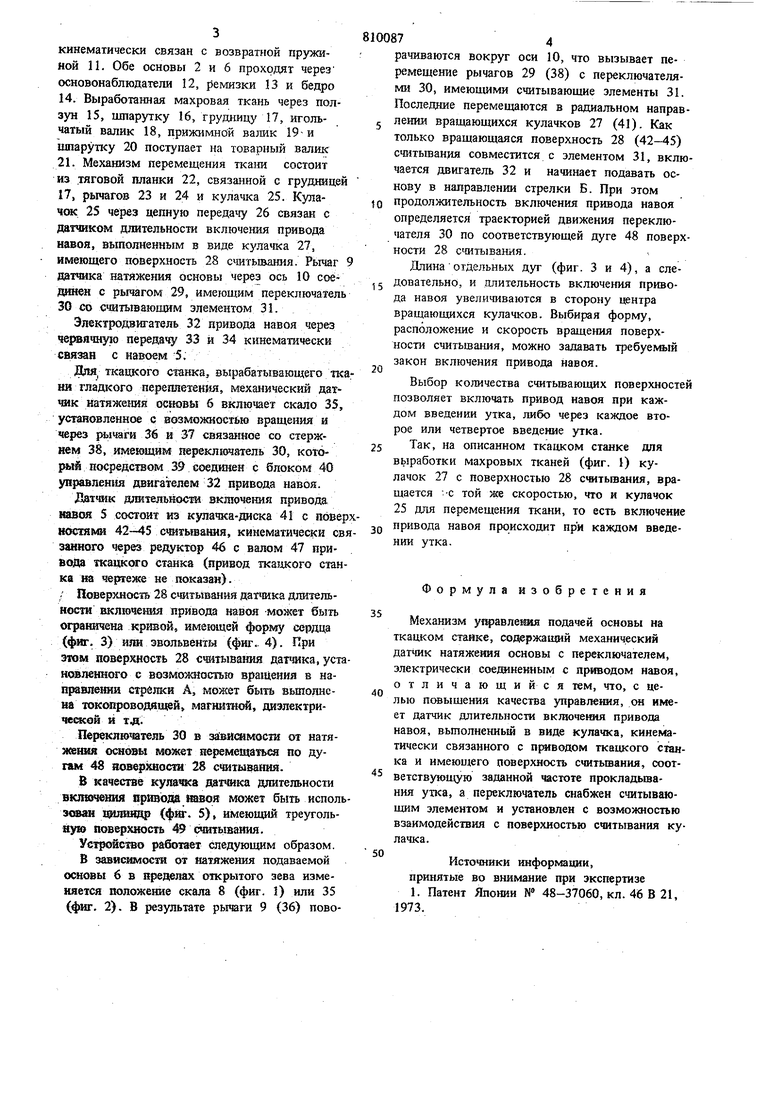
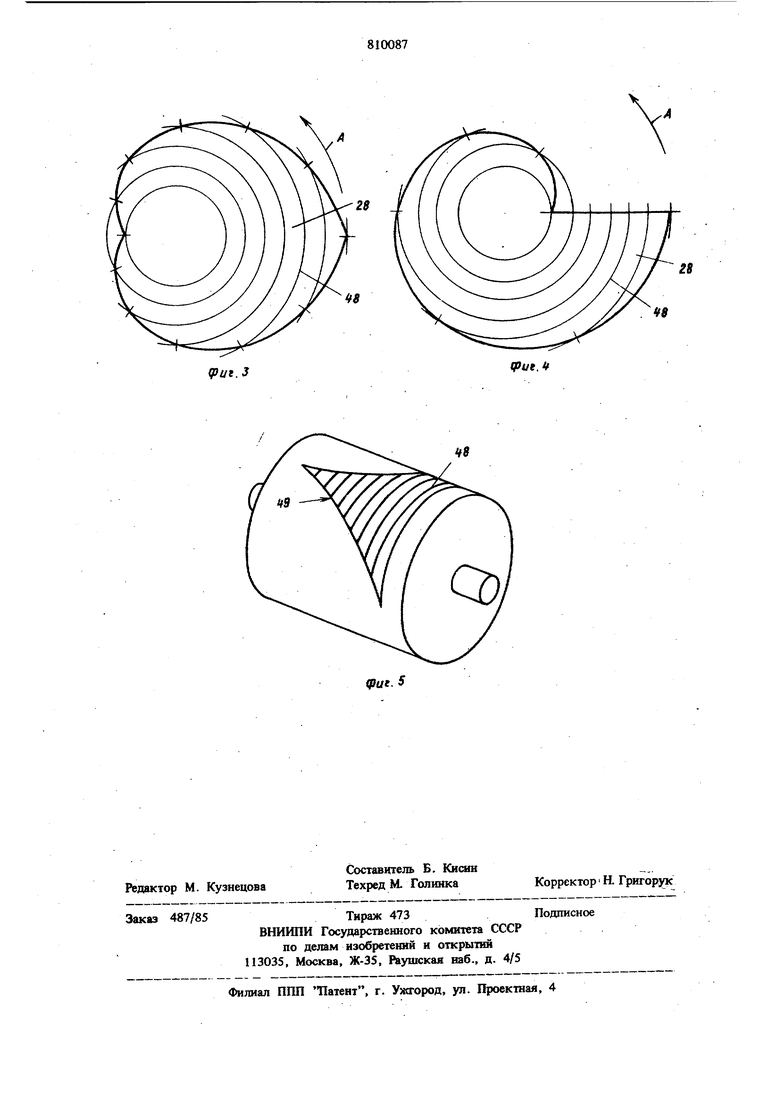
На фиг. 1 показана кинематическая схема механизма управления подачей основы на ткком станке для вь1борки махровых тканей; на фиг. 2 - кинематическая схема механизма подачи основы на ткацком станке для выборки тканей гладкого переплетения; на фиг. 3 изображена поверхность считьшания датчиков длительности включения привода, выполненная в форме сердца; на фиг. 4 - то же, вьшолненная в форме звольвенты; на фиг. 5 - то же, выполненная в форме треугольника.
Механизм подачи ошовы на ткацком станке для выработки махровых тканей (фиг.1) включает навой 1 с основой 2, взаимодействующей с направляющим валиком 3 и со скалом 4. Имеется также дополнительный навой 5 с ворсовой основной 6, взаимодействующей со шпаруткой 7. Механический датчик натяжения основы механизма зправления подачей основы включает гибкое скало 8, связанное с рычагом 9, установленным с возможностью поворота вокруг оси 10. Рычаг 9
кинематически связан с возвратной пружиной 11. Обе основы 2 и 6 проходят через основонаблюдатели 12, ремизки 13 и бедро 14. Выработанная махровая ткань через ползун 15, шпарутку 16, грудницу 17, игольчатый валик 18, прижимной валик 19-и шпарутку 20 поступает на товарный валик 21. Механизм перемещения ткают состоит из тяговой планки 22, связанной с грудшщей 17, рычагов 23 и 24 и кулачка 25. Кулачок 25 через цепную передачу 26 связан с датчиком длительности включения привода навоя, выполненным в виде кулачка 27, имеющего поверхность 28 свдтывания. Рычаг датчика натяжения основы через ось 10 соединен с рычагом 29, имеющим переключатель 30 со свдтывающим элементом 31.
Электродв№атель 32 привода навоя через червячн ао передачу 33 и 34 кинематически связан с навоем 5;
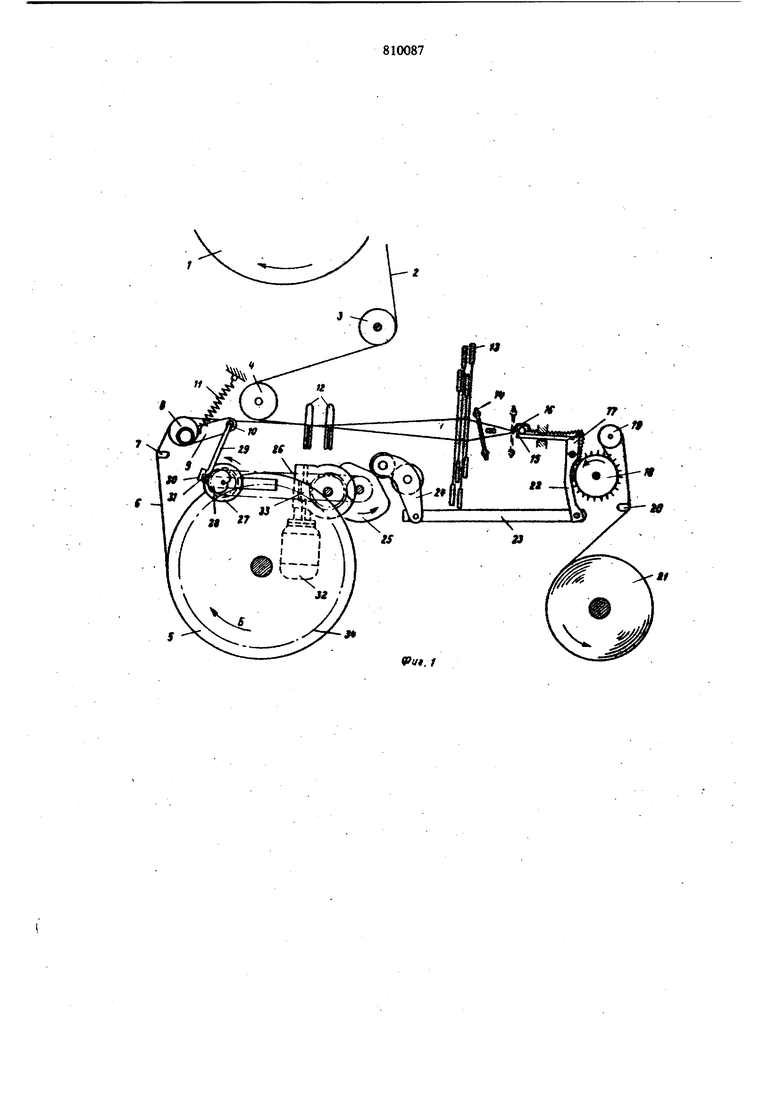
Jbw, ткацкого станка, вырабатывающего ткни гладкого переплетенш, механический датчик натяжения ОС1ЮВЫ б включает скало 35, установленное с возможностью вращения и через рычаги 36 и 37 сйязанное со стержнем 38, имеющим перекл$оч8тель 30, который посредством 39 соединен с блоком 40 управлеш я двигателем 32 привода навоя.
JSaiifliK длительносда экшочения привода «авок 5 состоит из кулачка-диска 41 с пове носхя 42-45 счи ьшания, кинематически свзанного через редуктор 46 с валом 47 привада ткацкото станка (привод ткацкого станка на чертеже не показав). / Поверхность 28 счишванйя длжЕтельности включения привода навоя может быть ограничена кривой, имеющей форму сердца (фиг. 3) или звольвенты (фш-. 4). При этом поверхность 28 сштываиня датчика, устновленного с возмояжостьн} вращения в направпешш А, может быть выполнена токопроводящей магни-шой, диэлектри юской и т.д.
Шреключатедь 30 в за(вишмости от натяжешш ошовы может аеремещзпея по дугам 48 яоверхносш 28 считыватш.
В качестве кулака дарвнса длительности ъкаеаче/вия навоя может быть исползован щшшЕДр (фиг. 5), имеющий треугольную поверхность 49 считьшаиия.
Устройство работает следующим образом. В зависшисстй от натяжения подаваемой основы 6 в пределах открытого зева изменяется положеине скала 8 (фиг. 1) или 35 (фиг. 2). В результате рычаги 9 (36) пово100874
рачиваются вокруг оси 10, что вызывает перемещение рычагов 29 (38) с переключателями 30, имеющими считывающие элементы 31. Последние перемещаются в радиальном направ5 лении вращающихся кулачков 27 (41). Как только вращающаяся поверхность 28 (42-45) считьшания совместится с элементом 31, включается двигатель 32 и начинает подавать основу в направлении стрелки Б. При этом JQ продолжительность включения привода навоя определяется траекторией движения переключателя 30 по соответствующей дуге 48 поверхности 28 сштывания.
Длинаотдельных дуг (фиг. 3 и 4), а сле,5 довательно, и длительность включения привода навоя увеличиваются в сторону цгнтра вращающихся кулачков. Выбирая форму, расположение и скорость вращения поверхности считьшания, можно задавать требуемый закон включения привода навоя.
Выбор количества считьюающих поверхностей позволяет включать привод навоя при каждом введении утка, либо через каждое второе или четвертое введение утка.
25 Так, на описанном ткацком станке для вьфаботки махровых тканей (фиг. 1) кулачок 27 с поверхностью 28 считьгаания, вращается --с той же скоростью, что и кулачок 25 для перемещения ткани, то есть включение
3Q привода навоя происходит при каждом введении утка.
Формула изобретения
Механизм унравлешш подачей основы на ткацком стайке, содержащий механический датчик натяжения основы с переключателем, электрически соединенным с приводом навоя, отличающийся тем, что, с целью повышения качества управлеш я, он имеет датчик длительности вкщочеюш привода навоя, вьшолненный в виде кулачка, кинематически связанного с приводом ткацкого станка и имеющего поверхность считьшания, соответствующую заданной частоте прокладывания утка, а переключатель снабжен считывающим элементом и установлен с возможностью взаимодействия с поверхностью считывания кулачка.
Источники информации, принятые во внимание при экспертизе 1. Патент Японии N 48-37060, кл. 46 В 21, 1973.
. 2
(put.s
px/e.
t9
(Put. S
