(54) ЗАХВАТ МАНИПУЛЯТОРА
Параметры шарнирного механизма определяются .исходя из свойств подиимаемых грузов: формы, габаритов, твердости
и т. Дц
Длина звеньев / выбирается исходя из максимальных габаритов поднимаемого груза и 1ИЗ общей комлоновки всего манипулятора.
Углы а и р выбирается из возможного максимальнаго раскрытия захватиых губок и ,их положения В сжатом состоянии, т. е. из диапазона захвата грузов разных форм и габаритов. При этом большее значение угла а .соответствует большему раскрытию захватных -губок.
Усилие сжатия губок иа поднимаемый предмет разной формы и габаритов можно регулировать либо длиной звеньев механизма, либо моментом 1на .ведущем кривощипе, момент можно регулировать муфтой предельного момента (на чертеже не показана).
Устройство работает следующим образом.
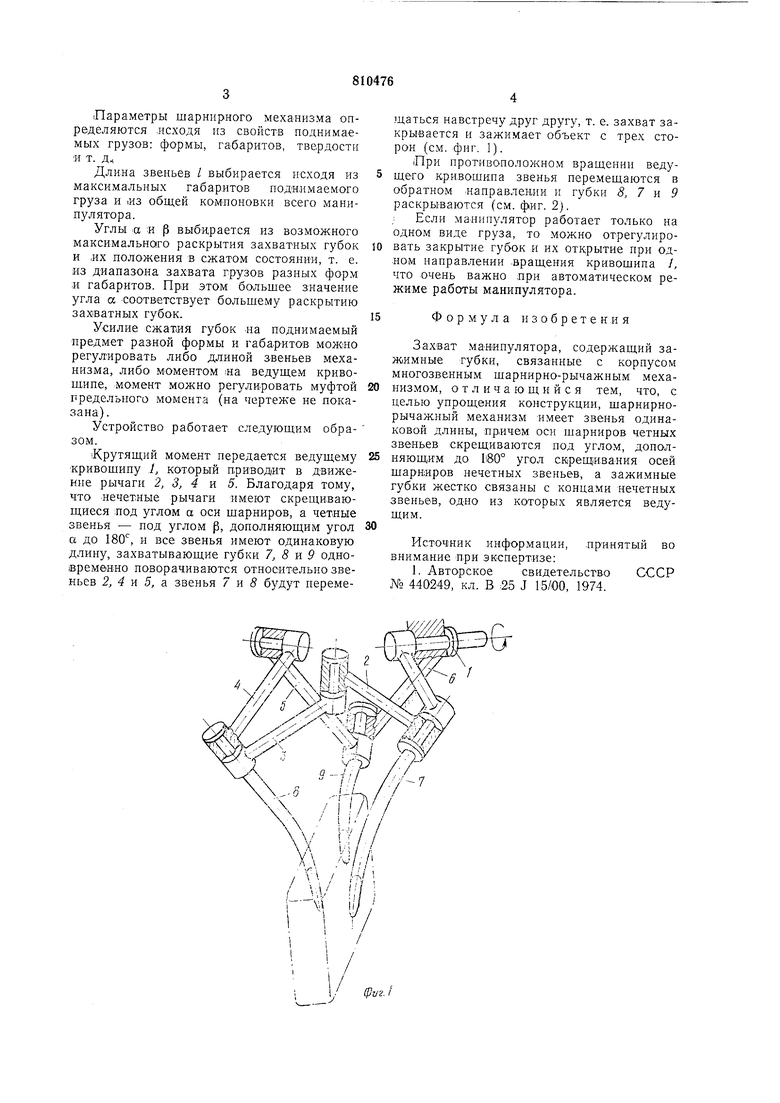
:Крутящий момент передается ведущему кривошипу ,Л который приводит в движение рычаги 2, 3, 4 и 5. Благодаря тому, что .нечетные рычаги имеют скрещивающиеся под углом а оси шарниров, а четные звенья - под углом р, дополняющим угол а до ISO, и все звенья имеют одинаковую длину, захватывающие губки 7, 8 и 9 одноBpeMOHiHo поворачиваются относительно звеньев 2, 4 и 5, а звенья 7 и 8 будут перемеу
щаться навстречу друг другу, т. е. захват закрывается и зажимает объект с трех сторон (см. фиг. 1).
При противоположном вращении ведущего кривоши1па звенья перемещаются в обратном .направлении и губки 8, 7 и 9 раскрываются (см. фиг. 2). ; Если манипулятор работает только на одном виде груза, то можно отрегулировать закрытие губок и их от1 рытие при од.ном направлении ,В|ращевия кривошипа /, что очень важно .при автоматическом режиме работы манипулятора.
Формула изобретения
Захват манипулятора, содержащий заЖ1имные губки, связанные с корпусом многозвенным шарнирно-рычаж.ным механизмом, отличающийся тем, что, с целью упрощения конструкции, шарнириорычажный механизм имеет звенья одинаковой длины, .причем оси шарниров четных звеньев скрещиваются под углом, дополняющим до Ii80° угол |СК|рещи.ва.ния осей щарйиров нечетных звеньев, а зажимные губки жестко связаны с концами нечетных звеньев, одно из которых является ведущим.
Источник информации, .принятый во .внимание ори экспертизе:
1. Авторское свидетельство СССР № 440249, кл. В (25 J 16/00, 19.74.
(./
Фиъ.1
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для галтовки деталей | 1978 |
|
SU751593A1 |
| Устройство для галтовки деталей | 1979 |
|
SU812535A1 |
| Устройство для развлечений | 1978 |
|
SU774567A1 |
| РЕЖУЩИЙ АППАРАТ ЖАТВЕННЫХ МАШИН | 2015 |
|
RU2606095C1 |
| Устройство для жидкостной обработки изделий | 1979 |
|
SU883210A1 |
| Устройство для расчесывания меховых шкурок | 1987 |
|
SU1472513A1 |
| Землеройная машина | 1979 |
|
SU883248A1 |
| Смеситель | 1979 |
|
SU797878A1 |
| Шарнирно-рычажный механизм | 1979 |
|
SU947536A1 |
| ШАРНИРНО-РЫЧАЖНЫЙ МЕХАНИЗМ | 2015 |
|
RU2605955C1 |

