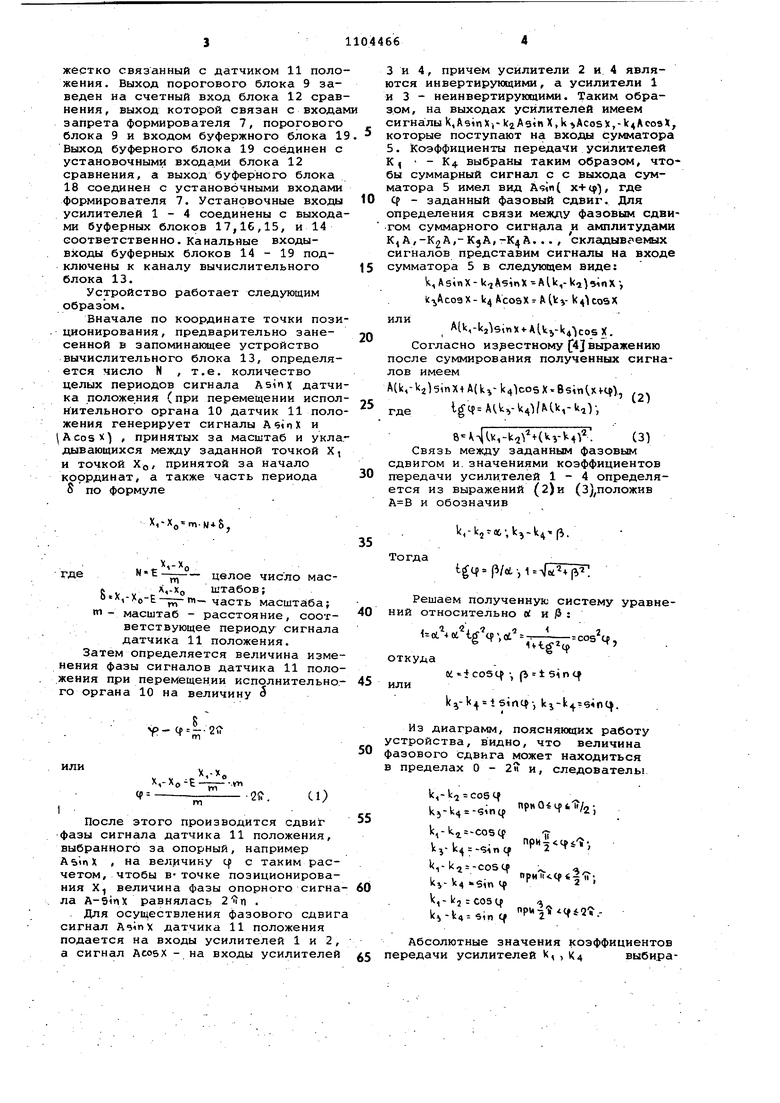
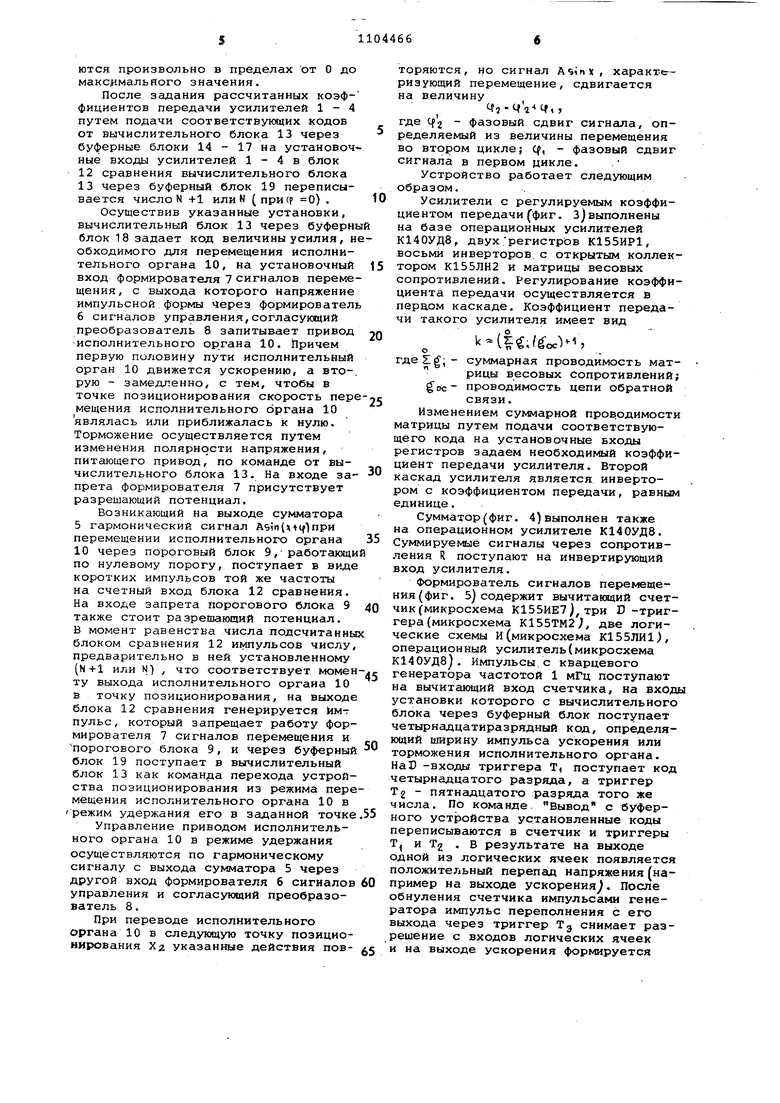
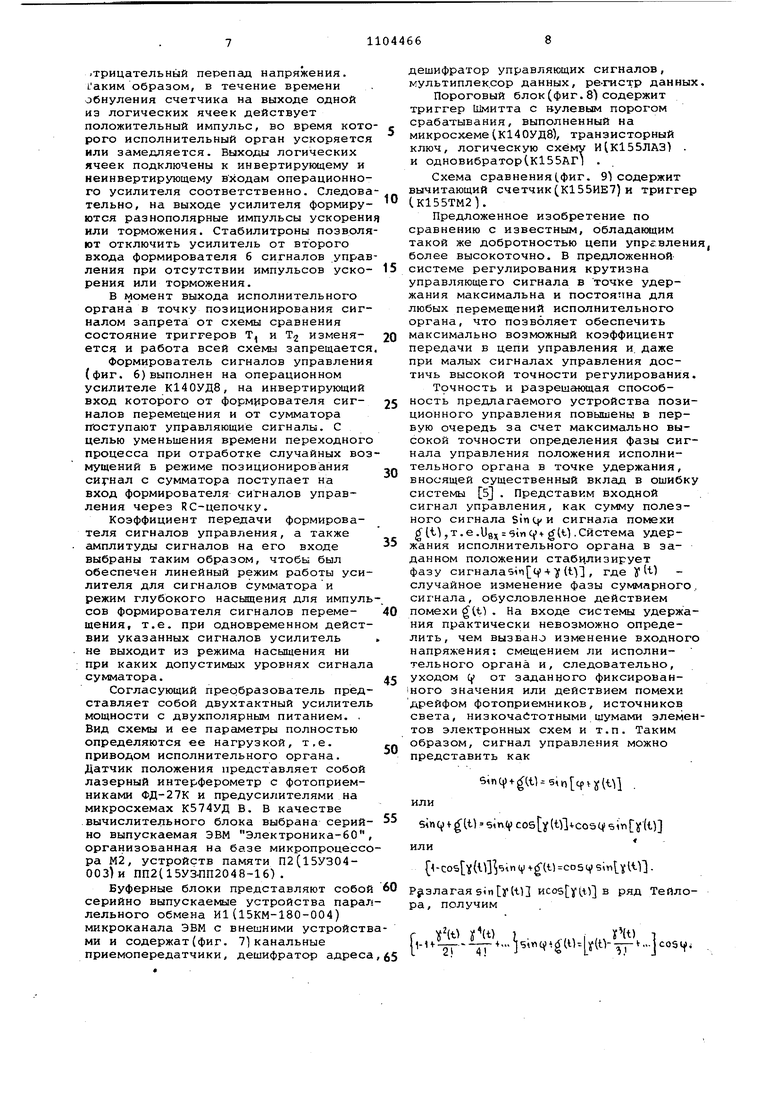
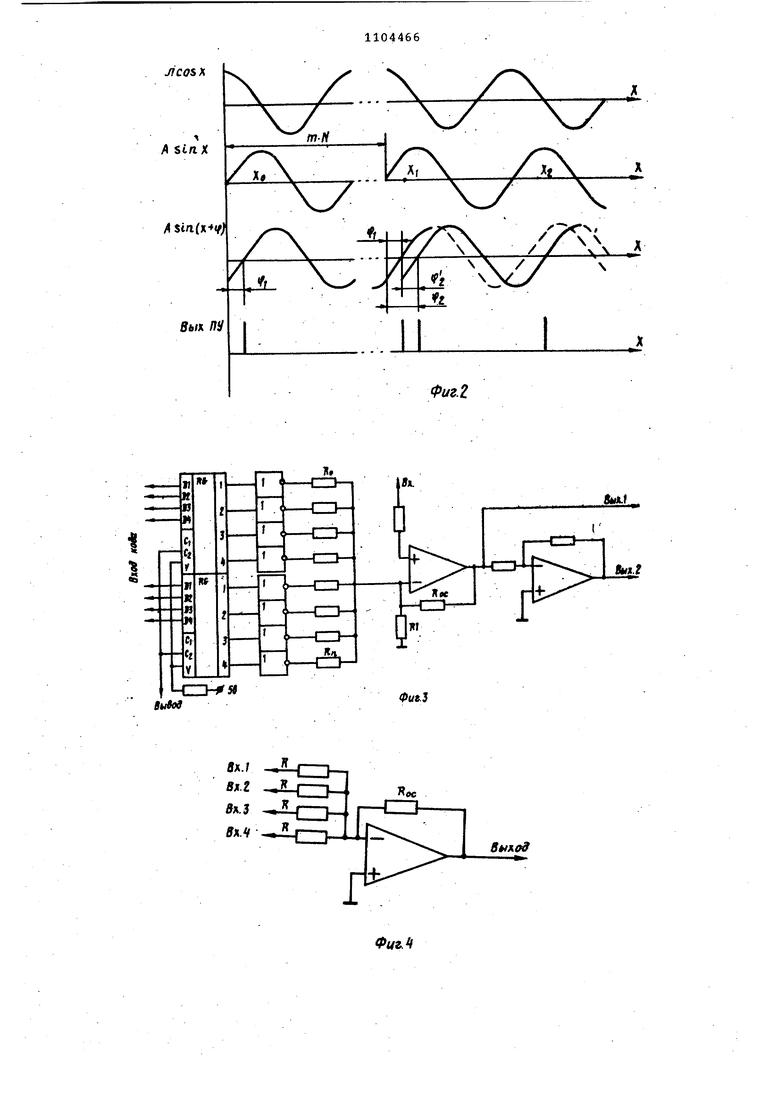
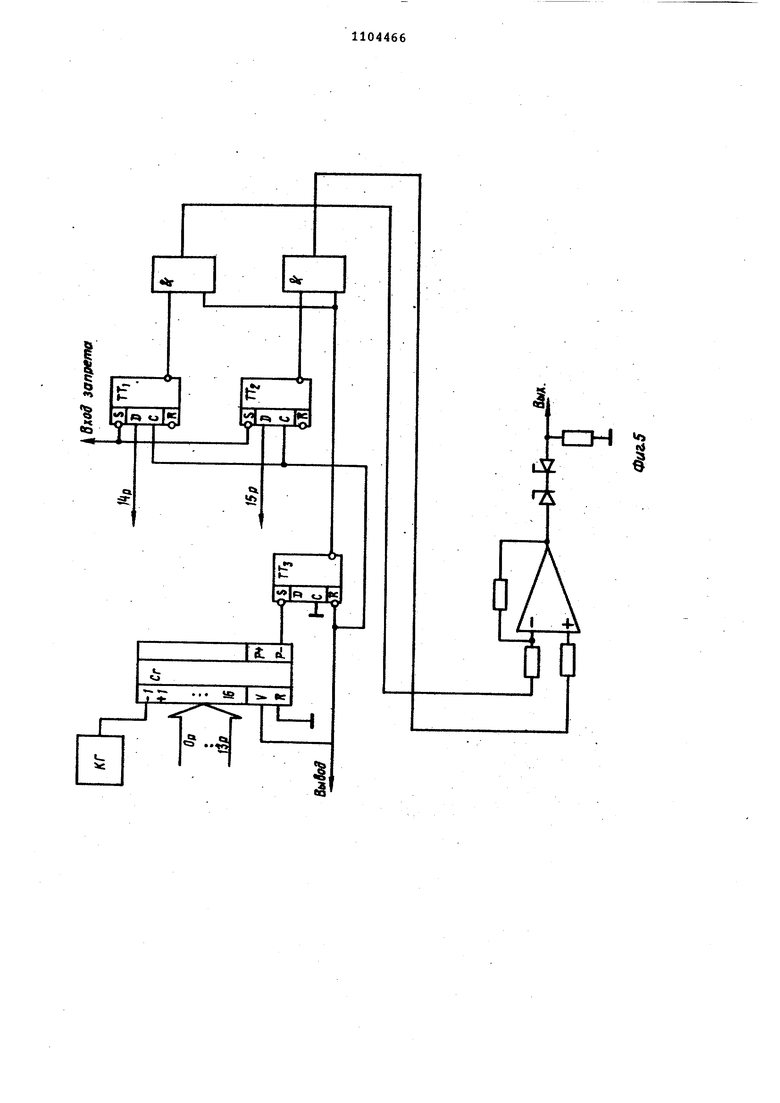
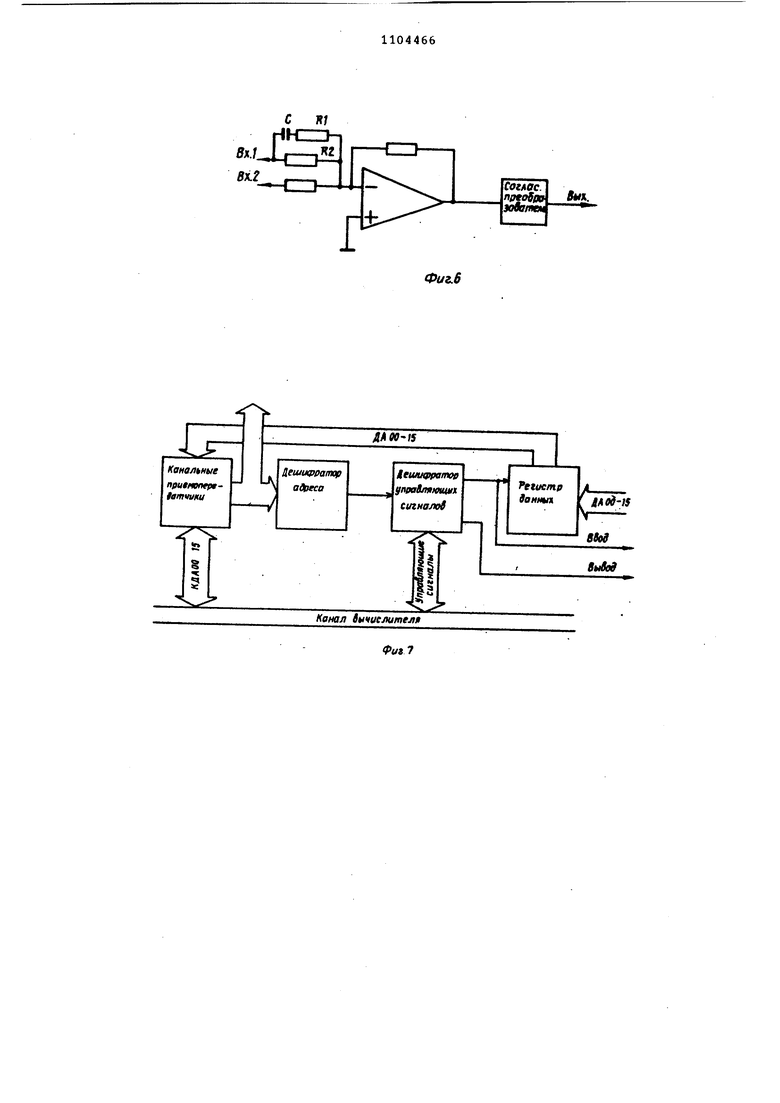
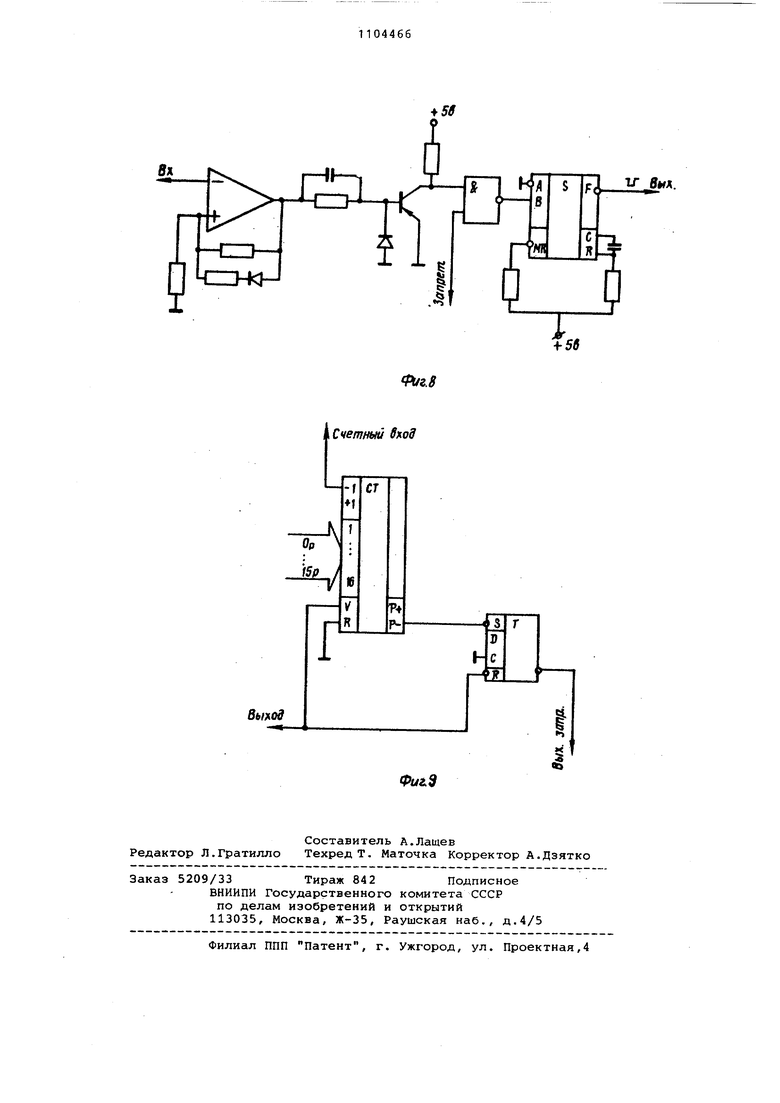
Изобретение относится к автомати ке и..вычислительной технике и может быть использовано для управления прецизионным технологическим оборуд ванием с числовым программным управлением. Известен следящий привод, состоя щий из кодового устройства ввода, сумматора, преобразователя код напряжение, формирователя, задатчик скорости, усилителя мощности, двига теля, механизма, датч-ика скорости, датчи-ка положения, преобразователя фаза - код ij -. К недостаткам этого следящего привода относятся его невысокая точность и дискретность позициониро вания, вызванные наличием ошибки преобразования фазы в код и конечностью минимального шага квантовани фазы,а также его cлoжнocть особен но при значительном отличии между . собой требуемой дискретности задани положения и точности отработки. Известно также устройство управления позиционированием, состоящее из задатчика положения, цифрового детектора, вычитающей схемы, цифроаналогового преобразователя,- сервоусилителя, сервоклапана, исполнител ного органа 23. Недостатками такого устройства являются невысокая точность и разрешающая способность позиционирования, ограниченные минимальным уровнем квантования сигнала, характеризующего перемещение. Наиболее близким к предлагаемому по технической сущности является система регулирования технологических процессов, содержащая задающие устройство, устройство сравнения, формирователь сигналов управления, согласующий преобразователь, исполнительный механизм, объект регулиро вания , датчик регулируемого парамет ра, преобразовател-ь аналог - код, коммутатор З . Недостатками известной системы являются невысокая разрешающая спо собность и точность позиционировани ограниченные минимальным уровнем .квантования сигнала, характеризующе го перемещение. Целью изобретения является повышение точности и разрешающей способ ности позиционирования за счет обес печения постоянной максимальной и не зависящей от дискретности позиционирования крутизны управляющего сигнала в точке удержания. Указанная цель достигается тем, что устройство для позиционного управления, содержащее вычислительный блок, связанный с шестью буферными блоками, блок сравнения, соединенный с вторым выходом первог буферного блока, и последовательно соединенные формирователь сигнала управления, согласующий преобразователь, исполнительный орган и датчик положения, дополнительно содержит четыре усилителя, сумматор -, порого-. вый блок и формирователь сигнала перемеиения, первый вход которого соединен с выходом блока сравнения, вторым входом первого буферного блока и через пороговый блок - с входом блока сравнения, второй входс вторым выходом второго буферного блока, а выход - с первым входом формирователя сигнала управления, вторые выходы третьего, четвер того, пятого и шестого буферныхблоков соединены с первыми входами соответстве нно первого, второго, третьего и четвертого усилителей, выходы которых через сумматор соединены с вторыми входами формирователя сигнала и порогового блока, вторые входы перЬого и второго усилителей соединены с первым выходом датчика положения, вторым входом соединенного с вторыми входами третьего и четвертого усилителей . На фиг. 1 изображена структурная схема устройства; на фиг. 2 -.диаграммы, поясняющие его работу; на фиг. 3 - схэма усилителя с регулируемым коэффициентом передачи; на фиг. 4 - то же., сумматора; на фиг.5то же,формирователя сигналов перемещения; на фиг. 6 - формирователь сигналов управления; на фиг. -7 схема буферных блоков; на фиг. 8то же,порогового блока; на фиг.9то же, блока сравнения. Устройство состоит из усилителей 1 - 4 с регулируемым коэффициентом передачи, сумматора 5, формирователя 6сигналов управления, формирователя 7сигналов перемещения, согласующего преобразователя 8, порогового блока 9, исполнительного органа 10, датчика 11 положения, блока 12 сравнения, вычислительного блока 13, буферных блоков 14-19. Входы усилителей 1 и 2 связаны между собой и подключены к одному из входов дат-гика 11 положения, входы усилителей 3 и 4 также связаны между собой и подключены к второму выходу датчика 11 положения. Выходы усилителей заведены на входы сумматора 5, выход которого связан с одним из входов формирователя 6 сигналов управления и входом порогового блока 9. Второй вход формирователя б сигналов управления соединен с выходом формирователя 7 сигналов перемещения. Выход формирователя 6 заведен на вход согласующего преобразователя 8, к выходу которого подключен исполнительный орган 10, жестко связанный с датчиком 11 положения. Выход порогового блока 9 заведен на счетный вход блока 12 сравнения, выход которой связан с входам запрета формирователя 7, порогового блока 9 и бходом буфержного блока 19 Выход буферного блока 19 соединен с установочными входами блока 12 сравнения, а выход буферного блока 18 соединен с установочными входами формирователя 7. Установочные входы усилителей 1-4 соединены с выходами буферных блоков 17,16,15, и 14 соответственно. Канальные входывходы буферных блоков 14 - 19 подключены к каналу вычислительного блока 13. Устройство работает следующим образом. Вначале по координате точки пози ционирования, предварительно занесенной в запоминающее устройство вычислительного блока 13, определяется число N , т.е. количество целых периодов сигнала Asinx датчика положения (при перемещении исполнительного органа 10 датчик 11 положения генерирует сигналы АбчпХ и |Асо5) , принятых за масштаб и укладывающихся между заданной точкой X; и точкой XQ, принятой за начало координат, а также часть периода S по формуле Xi-Xg m-MASj -f целое число масс У штабов; ° i- o-E-j т- часть масштаба; « -масштаб - расстояние, соответствующее периоду сигнала датчика 11 положения. Затем определяется величина изме нения фазы сигналов датчика 11 поло .жения при перемещении исполнительно го органа 10 на величину 5 xp(f4-2 , - „ . После этого производится сдвиг фазы сигнала датчика 11 положения, выбранного за опорный, например , на величину с с таким расчетом, чтобы в-точке позиционирования Х величина фазы опорного сигна ла A-SinX равнялась 2in . Для осуществления фазового сдвиг сигнал AsinX датчика 11 положения подается на входы усилителей 1 и 2, а сигнал Acogx -.на входы усилителей 3 и 4, причем усилители 2 и 4 являются инвертирующими, а усилители 1 и 3 - неинвертирующими. Таким образом, на выходах усилителей имеем сигналы k,AeinX)-k2Asin X,k AcosX,-k4 ° которые поступают на входы сумматора 5. Коэффициенты передач:и усилителей К, - К4 выбраны таким образом, чтобы суммарный сигнал с с выхода сумматора 5 имел вид A9in( х+с), где ср - заданный фазовый сдвиг. Для определения связи между фазовым сдвигом суммарного сигнала и амплитудами К,А,-К2А,-КзА,. .. , складывсемых сигналов представим сигналы на входе сумматора 5 в следующем виде: k, AsinX-l A5inX Alk,-ka)5;nX-, к-,,Асо9Х-1 4 fccosx fttVy или А г. 1 V , Alk,-kj StnX -Alkj-k4icosX. Согласно известному f43выражению после суммирования полученных сигналов имеем Alk,-l 2binX4A(k:j-k4lcosX«BsinU -t y, где , Bni(uv k Mv74F. СЗ) Связь между заданным фазовым сдвигом и. значениями коэффициентов передачи усилителей 1-4 определяется из выражений (2)и (3),положив и обозначив ..fi. tgq fi/oi.-, (i Решаем полученную систему уравнеотносительно Л и /J : . уда K-icosqt , ft-± siotf t , . Из диаграмм, поясняющих работу ройства, видно, что величина ового сдвига может находиться ределах О - 2п к, следователь k,-k coS4 k5-4 -5incp , Ic -kji-coscf7 ц-Ц -.пс .г-, k .k,.-coSC ;,. ky- k4 Ic -kjrCOSO-1 k,-k,.6,ncf .Абсолютные значения коэффициентов едачи усилителей К, , ((4 выбираются произвольно в пределах от О до максимального значения. После задания рассчитанных коэффициентов передачи усилителей 1-4 путем подачи соответствующих кодов от вычислительного блока 13 через буферные блоки 14 - 17 на установочные входы усилителей 1 - 4 в блок 12сравнения вычислительного блока 13через буферный блок 19 переписывается число N +1 или N (npHtp 0) . Осуществив указанные установки, вычислительный блок 13 через буферны блок 18 задает код величины усилия, н обходимого для перемещения исполнительного органа 10, на установочный вход формирователя 7 сигналов переме щения, с выхода которого напряжение импульсной формы 1ерез формировател 6 сигналов управления,согласующий преобразователь 8 запитывает привод исполнительного органа 10. Причем первую половину пути исполнительный орган 10 движется ускорению, а вторую - замедленно, с тем, чтобы в точке позиционирования скорость пер мещения исполнительного органа 10 являлась или приближалась к нулю. Торможение осуществляется путем изменения полярности напряжения, питающего привод, по команде от вычислительного блока 13. На входе запрета формирователя 7 присутствует разрешающий потенциал. Возникающий на выходе сумматора 5 гармонический сигнал A intx-KflnpH перемещении исполнительного органа 10 через пороговый блок 9,работающи по нулевому порогу, поступает в виде коротких импульсов той же частоты на счетный вход блока 12 сравнения. На входе запрета порогового блока 9 также стоит разрешанидий потенциал. В момент равенства числа подсчитанны блоком сравнения 12 импульсов числу предварительно в ней установленному (N+1 или N/) , что соответствует момен ту выхода исполнительного органа 10 в точку позиционирования, на выходе блока 12 сравнения генерируется имт пульс, который запрещает работу формирователя 7 сигналов перемещения и порогового блока 9, и через буферный блок 19 поступает в вычислительный блок 13 как коман ха перехода устройства позиционирования из режима пере мещения исполнительного органа 10 в режим удержания его в згщанной точке Управление приводом исполнительного органа 10 в режиме удержания осуществляются по гармоническому сигналу с выхода сумматора 5 через другой вход формирователя 6 сигналов управления и согласующий преобразователь 8. При переводе исполнительного органа 10 в следующую точку позиционирования Ха указанные действия повторяются, но сигнал A9inx, характеризующий перемещение, сдвигается на величину tfj-q fo где Cf2 фазовый сдвиг сигнала, определяемый из величины перемещения во втором цикле; Cf, - фазовый сдвиг сигнала в первом цикле. Устройство работает следующим образом. Усилители с регулируемым коэффициентом передачи(фиг. 3)выполнены на базе операционных усилителей К140УД8, двух-регистров К155ИР1, восьми инверторов, с открытым коллекTopciM К155ЛН2 и матрицы весовых сопротивлений. Регулирование коэффициента передачи осуществляется в пераом каскаде. Коэффициент передачи такого усилителя имеет вид (|€,, где Eg;- суммарная проводимость матрицы весовых Сопротивлений; ёос- проводимость цепи обратной связи. Изменением суммарной проводимости матрицы путем подачи соответствующего кода на установочные входы регистров задаем необходимый коэффициент передачи усилителя. Второй каскад усилителя является инвертором с коэффициентом передачи, равным единице. Сумматор(фиг. 4)выполнен также на операционном усилителе К140УД8. Суммируемые сигналы через сопротивления R поступают на инвертирующий вход усилителя. Формирователь сигналов перемещения (фиг. 5) содержит вычитакиций счетчик (микросхема К155ИЕ7),три D -триггера (микросхема K155TM2, две логические схемы И(микросхема К155ЛИ1), операционный усилитель(микросхема К140УД8. Импульсы.с кварцевого генератора частотой 1 мГц поступают на вычитающий вход счетчика, на входы установки которого с вычислительного блока через буферный блок поступает четырнадцатиразрядный код, определяющий ширину импульса ускорения или торможения исполнительного органа. HaD -входы триггера Т, поступает код четырнадцатого разряда, а триггер Tg - пятнадцатого разряда того же числа. По команде Вывод с буферного устройства установленные коды переписываются в счетчик и триггеры Т, и Tg .В результате на выходе одной из логических ячеек появляется положительный перепад напряжения(например на выходе ускорения. После обнуления счетчика импульсами геиератора импульс переполнения с его выхода через триггер Тд снимает разрешеиие с входов логических ячеек и на выходе ускорения формируется отрицательный перепад напряжения. 1аким образом, в течение времени обнуления счетчика на выходе одной из логических ячеек действует положительный импульс, во время кото рого исполнительный орган ускоряется или замедляется. Выходы логических ячеек подключены к инвертирунхцему и неинвертирующему входам операционного усилителя соответственно. Следова тельно, на выходе усилителя формируются разнополярные импульсы ускорени или торможения. Стабилитроны позволя ют отключить усилитель от второго входа формирователя 6 сигналов управ ления при отсутствии импульсов ускорения или торможения. В момент выхода исполнительного органа в точку позиционирования сигналом запрета от схемы сравнения состояние триггеров Т и Tj изменяется и работа всей схемы запрещается Формирователь сигналов управления (фиг. 6)выполнен на операционном усилителе К140УД8, на инвертирующий вход которого от формирователя сигналов перемещения и от сумматора поступают управляющие сигналы. С целью уменьшения времени переходного процесса при отработке случайных воз мущений в режиме позиционирования с сумматора поступает на вход формирователя сигналов управления через RC-цепочку. Коэффициент передачи формирователя сигналов управления, а также амплитуды сигналов на его входе выбраны таким образом, чтобы был обеспечен линейный режим работы усилителя для сигналов сумматора и режим глубокого насыщения для импуль сов формирователя сигналов перемещения, т.е. при одновременном действии указанных сигналов усилитель не выходит из режима насыщения ни при каких допустимых уровнях сигнала сумматора. Согласующий преобразователь представляет собой двухтактный усилитель мощности с двухполярным питанием. . Вид схемы и ее параметры полностью определяются ее нагрузкой, т,е. приводом исполнительного органа. Датчик положения представляет собой лазерный интерферометр с фотоприемниками ФД-27К и предусилителями на микросхемах К574УД В. В качестве вычислительного блока выбрана серийно выпускаемая ЭВМ Электроника-60, организованная на базе микропроцессо ра М2, устройств памяти П2(15У304003)и ПП2(15УЗЛП2048-16) . Буферные блоки представляют собой серийно выпускаемые устройства парал лельного обмена И1 (15КМ-180-004) микроканала ЭВМ с внешними устройств ми и содержат(фиг. 7 канальные приемопередатчики, дешифратор адреса дешифратор управляющих сигналов, мультиплексор данных, ре-гистр данных. Пороговый блок(фиг.8)содержит триггер Шмитта с нулевым порогом срабатывания, выполненный на микросхеме(К140УД8), транзисторный ключ, логическую схему И1К155ЛАЗ) . и одновибратор(.К155АГ1 . Схема сравнения (.фиг. 9 содержит вычитающий счетчик(К155ИЕ7)и триггер СК155ТМ21. Предложенное изобретение по сравнению с известным, обладающим такой же добротностью цепи упргвления, более высокоточно. В предложенной системе регулирования крутизна управляющего сигнала в точке удержания максимальна и постоятша для любых перемещений исполнительного органа, что позволяет обеспечить максимально возможный коэффициент передачи в цепи управления и, даже при малых сигналах управления достичь высокой точности регулирования. Точность и разрешающая способность предлагаемого устройства позиционного управления повышены в первую очередь за счет максимально высокой точности определения фазы сигнала управления положения исполнительного органа в точке удержания, вносящей существенный вклад в ошибку системы sj . Представим входной сигнал управления, как сумму полезного сигнала Sinti/и сигнала помехи g(.t,T.e.U8j 6iTiq t g(t) .Система удержания исполнительного органа в заданном положении стабилизирует фазу сигнала51п С|)4У (f , где У I-) случайное изменение фазы суммарного, сигнала, обусловленное действием помехи (11 . На входе системы удержания практически невозможно определить, чем вызвано изменение входного напряжения: смещением ли исполнительного органа и, следовательно, уходом If от заданного фиксирован ного значения или действием помехи дрейфом фотоприемников, источников света, низкочайтотными шумами элементов электронных схем и т.п. Таким образом, сигнал управления можно представить как ) + ai-5,)f(t sine, (t) 5in(() (t)C05t sin у (t) ((V+(t)C05tVSi tyWlР злагая sintyUl (.г) в ряд Тейлора, получим f,.,.f.«;ii....b,...s4«..L,(o-f....jco3,. Пренебрегая членами второго порядка малости уЩ«0.раЭ, получим ... .... yW-gttl/cosy. Анализ последнего выражения показывает, что, выбирая, можно умень шить величину фазового шума на вход системы регулирования, наложенного на сигнал управления. Как известно 6j, среднее значение квадрата ошибки прямо пропорционально спектральной плотности шумов, действующи в системе регулирования. В предлага емом устройстве точки удержания исполнительного органа на фазовой оси управляющего сигнала всегда соответствуют минимсшьным фазовым шумам управляющего сигнала С} кратно 27). В известном устройстве точкам удержания могут соответствовать другие значения. Например, если точка удер- жания соответствует ( (cos(,17), то флуктуации фазы в известной системе регулирования в шесть раз больше, чем у предлагаемой, T.K.YB ней всегда кратно 2п(сот2п-х 1, где ,1, 2,... Соответственно и точность у известной системы регулирования ниже, чем у предлагаемой. Учитывая тот .факт, что на точность системы регулирования оказывают влияние также и внутренние шумы системы, которьае могут в некотором пределе отличаться для разных реализаций устройств и которые в несколько раз меньше шумов на входе системы, и приняв во внимание приведенные выкладки, выигрыш в точности и разрешающей способности при использовании предлагаемого устройства составит порядка 2-3 раз.
ML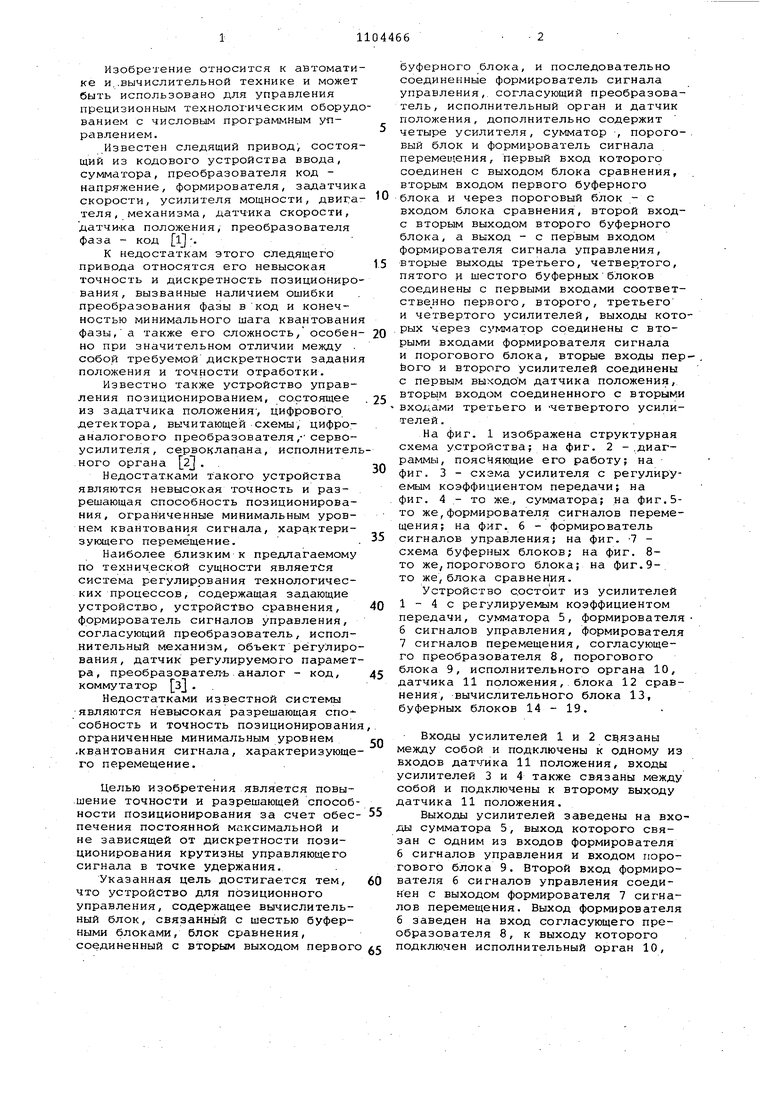
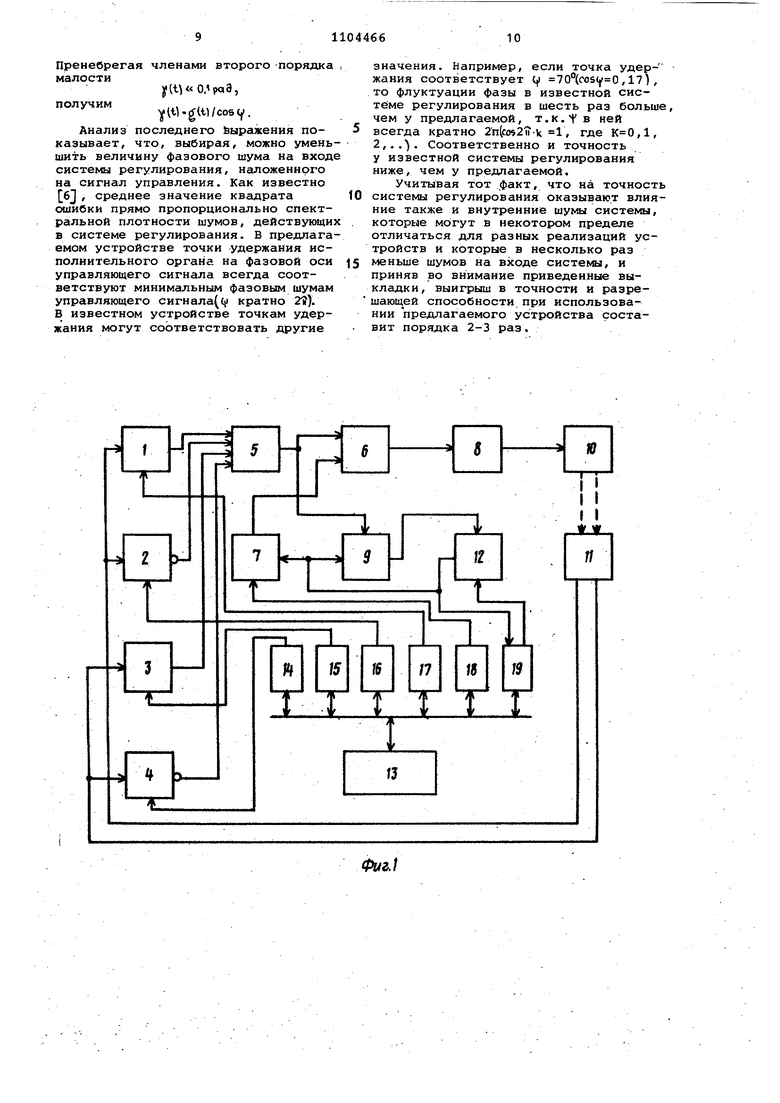
УСТРОЙСТВО ДЛЯ ПОЗИЦИОННОГО УПРАВЛЕНИЯ, содержащее вычислительный блок, связанный с шестью буферными бликами, блок сравнения, соединенный с вторым выходом первого буферного блока,и последовательно соединенные формирователь сигнала управления, согласующий преобразователь, исполнительный орган и датчик положения, отличающеес я тем, что, с целью повышения точности устройства, оно содержит четыре усилителя, сумматор, порого-вый блок и формирователь сигнала перемещения, первый вход которого соединен с выходом блока сравнения, вторым входом первого буферного блока и через пороговый блок - с входом блока сравнения, второй вход с вторым выходом второго буферного блока, а выход - с первым входом i формирователя сигнала управления, вторые выходы третьего, четвертого, (Л пятого и шестого буферных блоков соединены с первыми входами соответственно первого, второго, третьего и четвертого усилителей, выходы которых через сумматор соединены с вторыми входами формирователя.сигнала управления и порогового блока, вторые входы первого и второго усилителей соединены с первым выходом датчика положе;1ия, вторым входом . соединенного с вторыми входами тре тьего и четвертого усилителей,. 4 а: а:
tuM
я
WHV
R
Фт.З
oc
Соглос.
Вып.
8нМ
Счетньш 8мд
К
Op J5gy
Выход IT flwA.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Бай Р.Д | |||
| и др | |||
| Управление следящими электроприводами с применением цифровых устройств | |||
| М | |||
| , Энергия, 1969, с.26 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Приспособление для изготовления в грунте бетонных свай с употреблением обсадных труб | 1915 |
|
SU1981A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Система регулирования технологическихпРОцЕССОВ | 1979 |
|
SU851333A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| М., 1977, с | |||
| ГРОМКО - ГОВОРЯЩИЙ ТЕЛЕФОН | 1920 |
|
SU723A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Автоматическое управление электроприводом | |||
| Высшая школа, 1973, с.170 | |||
| Приспособление для точного наложения листов бумаги при снятии оттисков | 1922 |
|
SU6A1 |
| К., Машиностроение, 1978, с,471-472. | |||
