гопоточный привод поворотной платформы при большем числе потоков. Кроме того, известный привод не обеспечивает снижения динамических нагрузок, то есть безударного входа в зацепление зубьев нри включении привода.
Целью данного изобретения является снижение динамических нагрузок в приводе.
Эта цель достигается тем, что в приводе поворота платформы экскаватора, включающем двигатель, зубчатый венец и редуктор, имеющий косозубую передачу из ведущей шестерни и зубчатых колес, он снабжен упругими элементами, а зубчатые колеса установлены подвижно в осевом направлении с возможностью контакта с обеих сторон с предварительно сжатыми упругими элементами.
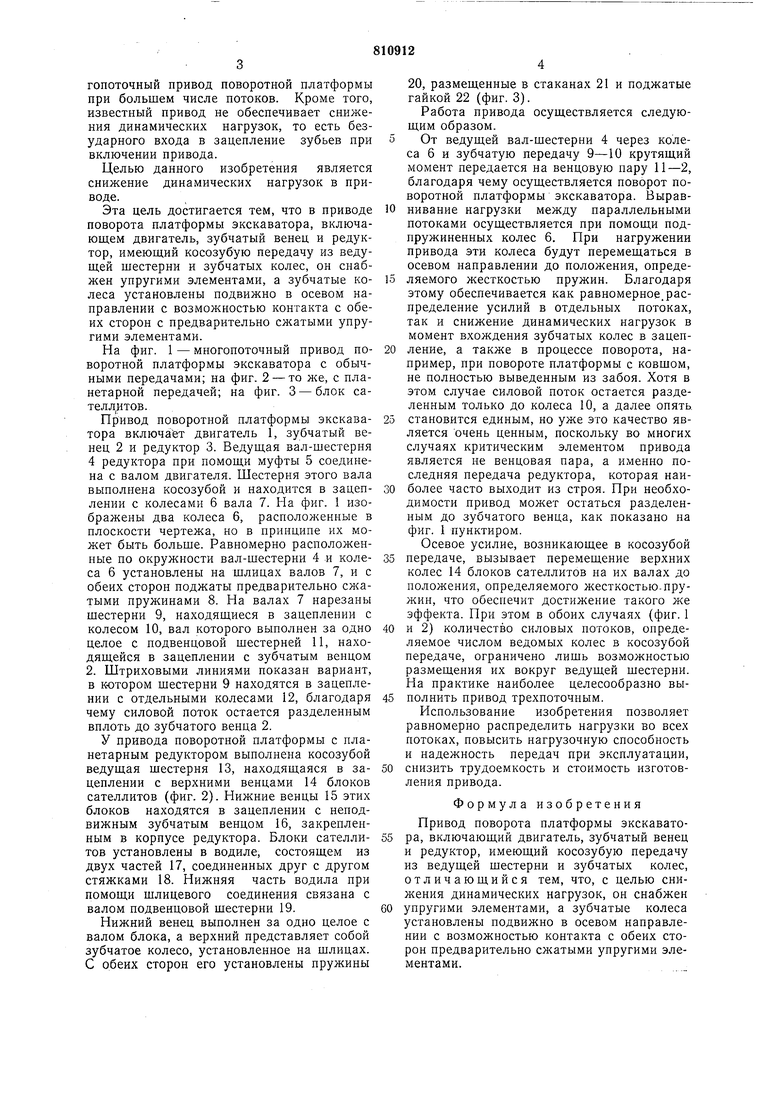
На фиг. 1 - многопоточный привод поворотной платформы экскаватора с обычными передачами; на фиг. 2 - то же, с планетарной передачей; на фиг. 3 - блок сателдитов.
Привод поворотной платформы экскаватора включает двигатель 1, зубчатый венец 2 и редуктор 3. Ведущая вал-шестерня 4 редуктора при помощи муфты 5 соединена с валом двигателя. Шестерня этого вала выполнена косозубой и находится в зацеплении с колесами 6 вала 7. На фиг. 1 изображены два колеса 6, расположенные в плоскости чертежа, но в принципе их может быть больше. Равномерно расположенные по окружности вал-шестерни 4 и колеса 6 установлены на шлицах валов 7, и с обеих сторон поджаты предварительно сжатыми пружинами 8. На валах 7 нарезаны шестерни 9, находящиеся в зацеплении с колесом 10, вал которого выполнен за одно целое с подвенцовой шестерней 11, находящейся в зацеплении с зубчатым венцом 2. Штриховыми линиями показан вариант, в котором щестерни 9 находятся в зацеплении с отдельными колесами 12, благодаря чему силовой поток остается разделенным вплоть до зубчатого венца 2.
У привода поворотной платформы с планетарным редуктором выполнена косозубой ведущая шестерня 13, находящаяся в зацеплении с верхними венцами 14 блоков сателлитов (фиг. 2). Нижние венцы 15 этих блоков находятся в зацеплении с неподвижным зубчатым венцом 16, закрепленным в корпусе редуктора. Блоки сателлитов установлены в воднле, состоящем из двух частей 17, соединенных друг с другом стяжками 18. Нижняя часть водила при помощи шлицевого соединения связана с валом подвенцовой шестерни 19.
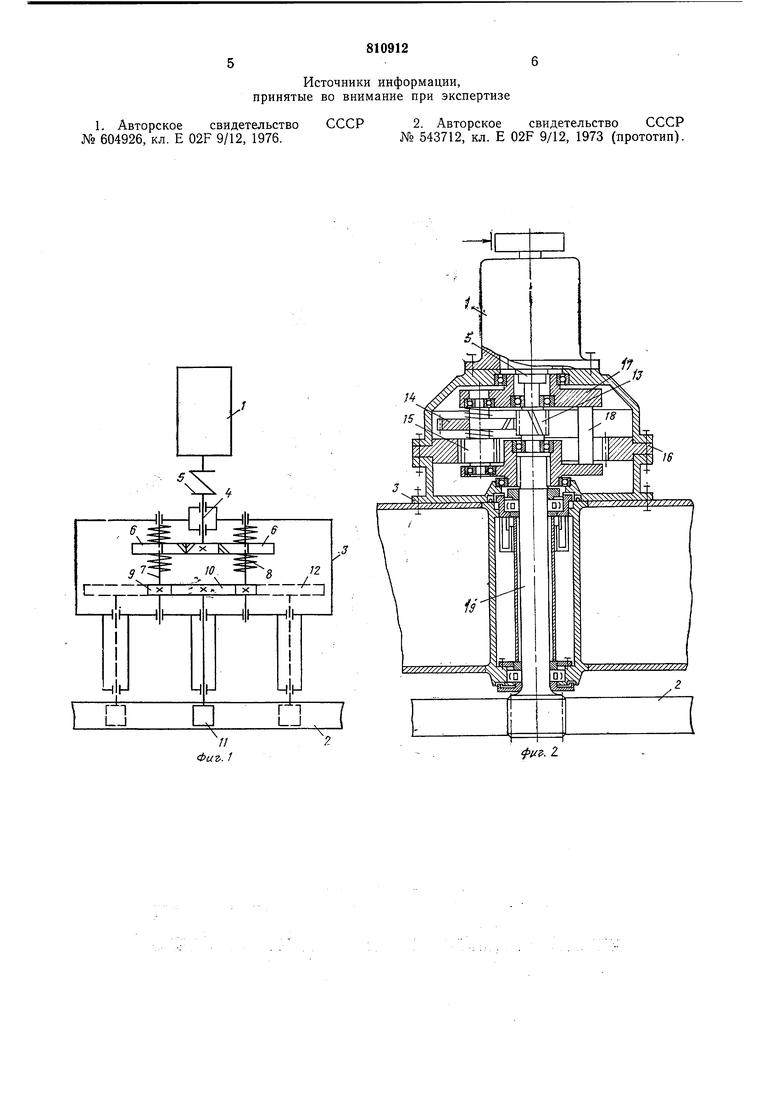
Нижний венец выполнен за одно целое с валом блока, а верхний представляет собой зубчатое колесо, установленное на шлицах. С обеих сторон его установлены пружины
20, размещенные в стаканах 21 и поджатые гайкой 22 (фиг. 3).
Работа привода осуществляется следующим образом.
От ведущей вал-шестерни 4 через колеса 6 и зубчатую передачу 9-10 крутящий момент передается на венцовую пару И-2, благодаря чему осуществляется поворот поворотной платформы экскаватора. Выравнивание нагрузки между параллельными потоками осуществляется при помощи подпружиненных колес 6. При нагружении привода эти колеса будут перемещаться в осевом направлении до положения, определяемого жесткостью пружин. Благодаря этому обеспечивается как равномерное, распределение усилий в отдельных потоках, так и снижение динамических нагрузок в момент вхождения зубчатых колес в зацепление, а также в процессе поворота, например, при повороте платформы с ковщом, не полностью выведенным из забоя. Хотя в этом случае силовой поток остается разделенным только до колеса 10, а далее опять
становится единым, но уже это качество является очень ценным, поскольку во многих случаях критическим элементом привода является не венцовая пара, а именно последняя передача редуктора, которая наиболее часто выходит из строя. При необходимости привод может остаться разделенным до зубчатого венца, как показано на фиг. 1 пунктиром. Осевое усилие, возникающее в косозубой
передаче, вызывает перемещение верхних колес 14 блоков сателлитов на их валах до положения, определяемого жесткостью-пружин, что обеспечит достижение такого же эффекта. При этом в обоих случаях (фиг. 1
и 2) количество силовых потоков, определяемое числом ведомых колес в косозубой передаче, ограничено лишь возможностью размещения их вокруг ведущей шестерни. На практике наиболее целесообразно выполнить привод трехпоточным.
Использование изобретения позволяет равномерно распределить нагрузки во всех потоках, повысить нагрузочную способность и надежность передач при эксплуатации,
снизить трудоемкость и стоимость изготовления привода.
Формула изобретения
Привод поворота платформы экскаватора, включающий двигатель, зубчатый венец и редуктор, имеющий косозубую передачу из ведущей шестерни и зубчатых колес, отличающийся тем, что, с целью снижения динамических нагрузок, он снабжен упругими элементами, а зубчатые колеса установлены подвижно в осевом направлении с возможностью контакта с обеих сторон предварительно сжатыми упругими элементами.
56
Источники информации, принятые во внимание при экспертизе
1 Авторское свидетельство СССР2. Авторское свидетельство СССР
№ 604926, кл. Е 02F 9/12, 1976.№ 543712, кл. Е 02F 9/12, 1973 (прототип).
810912
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод поворота платформы экскаватора | 1989 |
|
SU1682488A1 |
| Механизм поворота платформы землеройной машины | 1982 |
|
SU1082913A1 |
| Устройство для позиционирования и круговых подач планшайбы металлорежущего станка | 1988 |
|
SU1590317A1 |
| РЕДУКТОР ПОВОРОТНОГО МЕХАНИЗМА КРАНА | 1992 |
|
RU2043551C1 |
| Поворотное устройство платформы подъемно-транспортного средства | 1982 |
|
SU1065332A1 |
| Механизм поворота платформы экскаватора | 1990 |
|
SU1778248A1 |
| МЕХАНИЗМ ПОВОРОТА (ВАРИАНТЫ) | 2002 |
|
RU2225549C2 |
| ПРИВОД ПЕЧИ | 1995 |
|
RU2109238C1 |
| Планетарный редуктор преимущественно для турбозубчатых агрегатов | 1979 |
|
SU954672A1 |
| ПРИВОДНОЕ УСТРОЙСТВО ВРАЩАЮЩЕГОСЯ ТЕХНОЛОГИЧЕСКОГО БАРАБАНА | 1990 |
|
SU1711534A1 |
-ф
н1Ь
I N1/X КУу
/
W.
/2
/ -
- X.,- 1x1 I
I
и
Ц.И
Ч
г 1
U II
vT w&. /
/7
/J
фи. 2.
22
21
