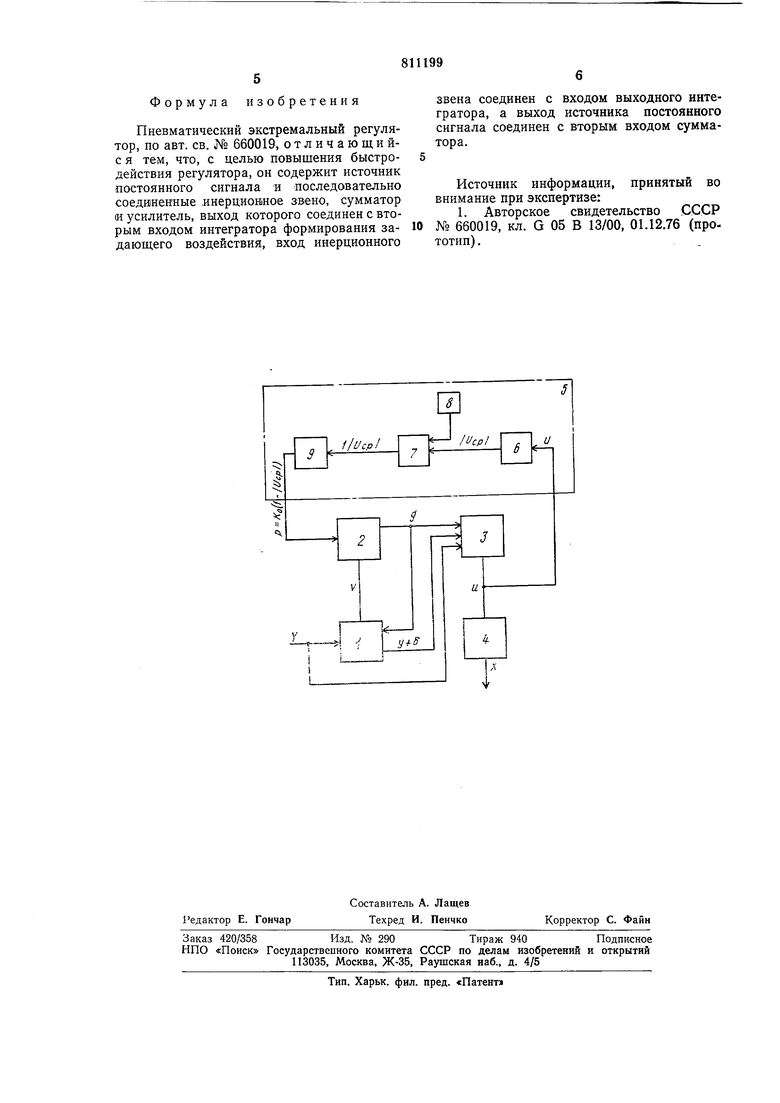
сматривасмом регуляторе движение к экстремуму осуществляется с недостаточной скоростью. Целью изобретения является повышение быстродействия регулятора. Достигается это тем, что регулятор содержит источник постоянного сигнала и последовательно соединенные инерционное звено, сумматор и усилитель, выход которого соединен с вторым входом интегратора формирования задающего воздействия, вход инерционного звена соединен с входом выходного интегратора, а выход источника постоянного сигнала соединен с вторым входом сумматора. Схема регулятора приведена на чертеже. Регулятор состоит из блока иереключеиия /, интегратора 2 формирования задающего воздействия, блока 3 формирования реверсирующего сигнала, выходного интегратора 4 и блока 5 нелинейной динамической коррекции, состоящего из инерционного звена 6, сумматора 7 с задатчиком 8 для подачи единичного сигнала и блока 9 умножения на постоянный коэффициент. Регулятор работает следующим образом. В блоках 1 VI 3 величина задающего воздействия g- сравнивается с оптимизируемой величиной у и величиной у + д (б - малая положительиая величина). Полученный сигнал рассогласования используется для изменения величины задающего воздействия (за счет подключения управляющего сигнала V), обесиечивая «близость величин у и g, а также для формирования в блоке 3 такого управляющего сигнала и, который, воздействуя на вход выходиого интегратора 4, сводит ошибку рассогласования к нулю и обеспечивает в дальнейшем слежение в скользящем режиме у за монотонно возрастающим (в случае поиска максимума) задающим воздействием g, что и позволяет обеспечить монотонное приближение величины к экстремуму. В рассмотренном регуляторе реализуется поиск с постоянной скоростью приближения к экстремуму. Для решения поставленной цели требуется построение системы, в которой скорость приближения к экстремуму изменяется в зависимости от крутизны экстремальной характеристики. Такой подход позволяет увеличить темп поиска при большом значении коэффициеита - и замедлять его при малом значении Разумеется, в такой системе не кается непосредственное измерение ,- В этой системе информация о -т- содержится в среднем значении уиравления Ucp, являющегося выходом инерционного звена 6 с малой постоянной времени т. где и - выходная величина блока формирования реверсирующего сигнала. Желаемый характер зависимости скорости поиска df от -,- будет иметь место, если скорость убывания задающего воздействия сформировать в виде p o(I-/t/cp/). Так как в скользящем режиме инерционное звено отфильтрует высокочастотную составляющую функцию управления, его выходная величина будет равна среднему значению управления , заключенному между -t/o и +Uo. Движение в скользящем режиме будет определяться этим средним управлением и поэтому желаемый характер зависимости скорости поиска от -7-7- будет иметь место, если скорость возарастания задающего воздействия сформировать в виде р kQ(-/f/cp/), где ko - постоянный коэффициент , при любом значении которого возиикает скользящий . Для реализации указанной зависимости Б регуляторе используется блок нелинейной динамической коррекции 5. Из вышеописанного видно, что при изменении крутизны экстремальной характеристики, например, при ее увеличении, увеличится частота переключения управляющего сигнала U и соответственно уменьшится выходная величина инерционного звена 6. Однако после суммирования /U с.р в сумматоре 7 с единичным сигналом, подаваемым задатчиком 8, выходная величина 1-/и ср/ увеличится и одновременно увеличится выходной сигиал р ko(l-/f/cp /) блока умножения на постоянный коэффициент 9, где . Вследствие этого, увеличится скорость задающего воздействия j-i . р что обеспечивает в итоге повышение быстродействия нневматического экстремального регулятора. Повышение быстродействия регулятора позволит уменьшить время поиска экстремума. Технико-экономический эффект определяется уменьшением потерь при работе регулятора. Пневматический экстремальный регулятор предполагается использовать в теме «АСУ компаундирования бензинов для увеличения с его помощью октанового числа бензина.
Формула изобретения
Пневматический экстремальный регулятор, по авт. св. № 660019, отличающийс я тем, что, с целью повышения быстродействия регулятора, он содержит источник постоянного сигнала и последовательно соединенные .инерционное звено, сумматор и усилитель, выход которого соединен с вторым входом интегратора формирования задающего воздействия, вход инерционного
звена соединен с входом выходного интегратора, а выход источника постоянного сигнала соединен с вторым входом сумматора.
Источник информации, принятый во внимание при экспертизе:
1. Авторское свидетельство СССР № 660019, кл. G 05 В 13/00, 01.12.76 (прототип) .
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический экстремальный регулятор | 1976 |
|
SU660019A2 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Пневматический экстремальный регулятор | 1975 |
|
SU561934A1 |
| Пневматический экстремальный регулятор | 1976 |
|
SU591817A2 |
| Импульсный экстремальный регулятор | 1974 |
|
SU458813A1 |
| Экстремальный регулятор для объектов с транспортным запаздыванием | 1979 |
|
SU792218A1 |
| МНОГОКАНАЛЬНЫЙ НЕПРЕРЫВНОШАГОВЫЙ ЭКСТРЕМАЛЬНЫЙ РЕГУЛЯТОР | 1973 |
|
SU374578A1 |
| СПОСОБ ПОИСКА ЭКСТРЕМУМА СТАТИСТИЧЕСКОЙ ХАРАКТЕРИСТИКИ ИНЕРЦИОННОГО ОБЪЕКТА | 2011 |
|
RU2471220C1 |
| Экстремальный регулятор | 1976 |
|
SU634233A1 |
| Система управления инерционным экстремальным объектом | 1986 |
|
SU1456930A1 |
