Изобретение относится к технике автоматического управления и регулирования и может быть использовано для оптимизации объектов, обладающих экстремальной характеристикой.
Известен пневматический экстремальный регулятор, описанный в основном авт.св. it 561934. Он содержит блок. переключения, интегратор формирова- , ния задающего воздействия, блок формирования реверсирующего сигнала и выходной интегратор. Блок переключения состоит из трех элементов сравнения, шести реле и двух задатчиков Выходной канал регулятора соединен с блоком формирования реверсирующего сигнала и с плюсовыми камерами первого и третьего элементов Сравнения. Выход интегратора формирования задающего воздействия подключен к минусовым камерам первого и второго элементов сравнения. Первый задатчик подключен к плюсовой камере третьего элемента сравнения, второй задатчик через первое реле соединен с соплами второго pejie и соответствующими камерами первого и второго элементов сравнения, выходы которых подк.шоченч к камерам третьего и четвертого реле Последнее соединено выходами с каке2
рами и соплами пятого реле, кот.орого соединен с камерами шестого первого и.второго реле. Выходы третьего, четвертого и шестого реле соединены со входами интегратора формирования задающего воздействия, а выход .третьего элемента сравнения подключен к блоку формирования реверсирующего сигнала. Оптимизируемая величина (сигнал) подается к блокам переключеи фррмирования реверсирующего сигнала. Выходы блока переключения соединены со входами интегратора формирования задающего воздействия и блока формирования реверсирующего сигнала. Выход интегратора формирования задающего воздействия подключен к входам блока переключения и блока формирования реверсирующего сигнала, выход которого соединен со входом выходного интегратора.
Принцип работы регулятора следующий. Оптимизируемая величина сравнивается с подобранньт задающим воздействием, полученный Сигнал рассогласования используется для формирования такого управляющего сигнала, который сводит ошибку к нулю и обеспечивает слежение в скользящем режиме оптимизируемой величины за задающим воздействием. В случае поиска максимума задакицее воздействие формируется в виде монотонно возрастгиощей .функции времени и после возникновения скольэясцего режима оптимизируемая вели,чина монотонно приближается к экстремуму, отслеживав Это воздействие. Для формирования управлянвдего сигнала
о при
inp«(Pg-P)tP9-( .Опрм Pg-lP,i8)0
где Prf - монотонно возрастающее задающее воздействие Ру - оптимизиру,емая величина; 8 - малая положител%ная величина, используется блок формирования реверсирующего сигнала, схемная реализации которого может быть различной.
Цель изобретения - упрощение конструкции регулятора.
Эта цель достигается тем, что бло формирования реверсирующего сигнала содержит два элемента сравнения и . реле, причем первый вход блока форьшрования реверсирующего сигнала соединен с плюсовой камерой первого элемента сравнения, второй вход - с мииусовыми камерами первого и второго элементов сравнения, а третий вход с плюсовой камерой второго элемента сравнения. Выходы первого и второго элементов сравнения соединены соответственно с плюсовой и минусовой камерами реле, выход которого соединен с выходом блока формирования реверсирующего сигнала.
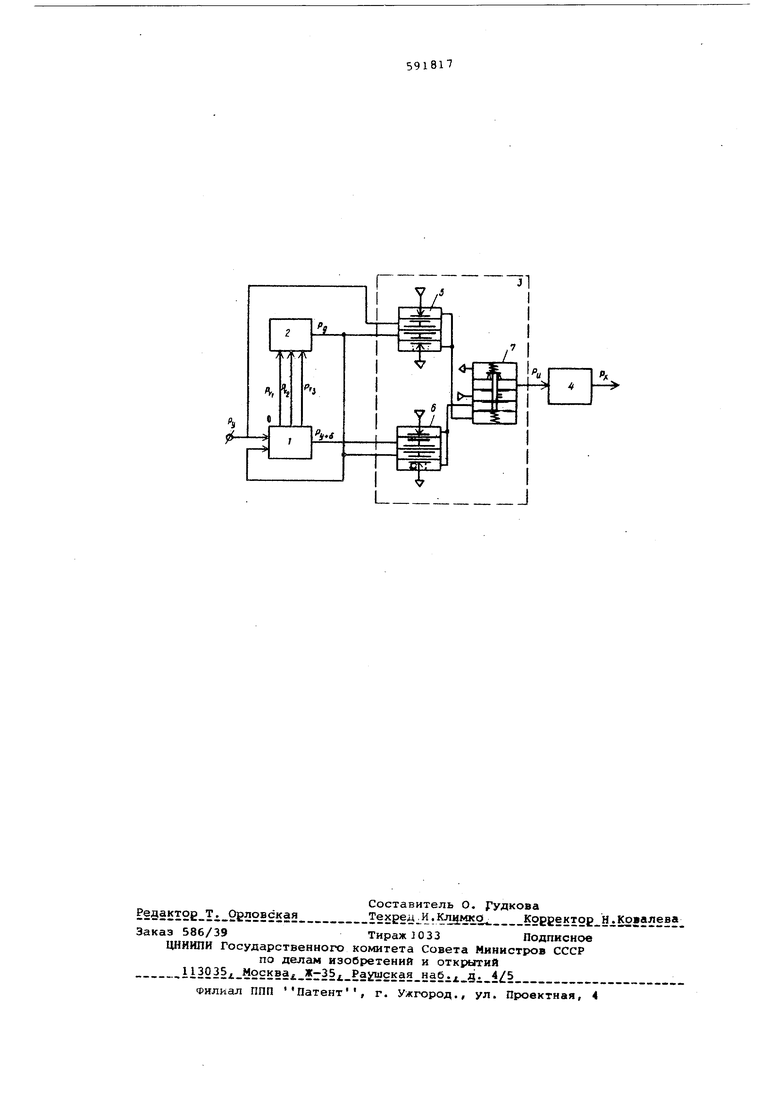
На чертеже показ;ана структурная схема предложенного регулятора.
Регулятор состоит из .блока переключения 1 , интегратора 2 формирования задающего воздействия, блока 3 формирования реверсирующего сигнала и выходного интегр, .4. Блок 3 содержит первый 5 и второй 6 элементы сравнения и реле 7.
Регулятор работает следующим образом. На элементах сравнения 5, б.блка 3 и в блоке переключения 1 величика згщающего воздействия Kg сравнивается с оптимизируемой величиной Ру и с величиной Ру + S . Полученный сигнал рассогласования используется для изменения величины задающего воздей5 СТВИЯРЙ за счет поступления сигна g
лов Р.,
Pvj,TaK чтобы обеспе- , -- VJ7
чивать близость величин Ру и Pg а также для формирования в блоке 3 такого управляющего, сигнала Р, который, воздействуя на вход выходного интегратора 4, сводит ошибку рассогласования к нулю и обеспечивает в дальнейшем слежение в скользящем ре/жиме Ру за монотонно возрастающим задающим воздействием Р| что и обуславливает монотонное приближение величины к экстремуму.В окрестности точки экстремума из-за уменьшения крутизны экстремальной характеристики скользящий режим срывается и возникает режим колебаний, амплитуда которых и определяет погрешность поиска.С помощью сигналов EV, , Руг УЗ система ста билизируется в окрестности экстремума. Пневматический экстремальный регулятор предполагается использовать при производстве формалина и уротропина на базе агрегатного комплекса пневматических средств Центр для увеличения выхода продукта,
Формула изобретения
Пневматический экстремальный регулятор по авт.св. № 561934, о т л ич а ю щ и и с я тем, что, с целью упрощения регулятора, блок формирования реверсирующего сигнала содержит два элемента сравнения и реле, причем первый вход блока формирования
реверсирующего сигнала соединен с плюсовой камерой первого элемента сравнения , второй .ijiojj; - с -минусовыми камерами первогО и второго элементов сравнения, а третий .-вход - с плюсовой камерой, Ьторого элемента сравнения, .выход которого rf первого элемента ,сравне ния соответственно с шдасовр й и минусовой камерами реле, выход которого соединен с выходом блока формирования реверсирующего сигнала.

| название | год | авторы | номер документа |
|---|---|---|---|
| Пневматический экстремальный регулятор | 1975 |
|
SU561934A1 |
| Пневматический экстремальный регулятор | 1976 |
|
SU660019A2 |
| Пневматический экстремальныйРЕгуляТОР | 1978 |
|
SU811199A2 |
| Пневматический шаговый экстремальный регулятор | 1975 |
|
SU651313A2 |
| КОМАНДНЫЙ БЛОК ДЛЯ ЭКСТРЕМАЛЬНОГО РЕГУЛЯТОРА | 2011 |
|
RU2475797C1 |
| Устройство для управления процессом каталитического алкилирования | 1979 |
|
SU905799A1 |
| Пневматический регулятор с переменной структурой | 1974 |
|
SU540256A1 |
| Пневматический регулятор с переменной структурой | 1977 |
|
SU684508A1 |
| Пневматический двухпозиционный регулятор | 1986 |
|
SU1409970A1 |
| АВТОМАТИЧЕСКИЙ ОПТИМИЗАТОР ДЛЯ УПРАВЛЕНИЯ СЕПАРАТОРОМ | 1970 |
|
SU282046A1 |