1
Изобретение относится к механической обработке материалов, а именно к устройствам для обработки
цилиндрических деталей.
Известен самоцентрирующий многокулачковый uaTROH, содержащий корпус, установленные под углом к оси патрона зажимные, кулачки и приводную тя-. ГУ с компенсирующими элементами 1.
Недостатком указанного патрона является сложность конструкции.
Цель изобретения - упрощение самоцентрирующего патрона.
Указанная цель достигается тем, что каждый кулачок патрона выполнен с рерпендикулярным к его оси срезом, контактирующим с компенсирующим элементом, причем угол наклона о.си компенсирующего элемента к оси патрона определяется следующей зависимостью:
CQSp/2.tgot
7Г
угол наклона оси цилиндрического сегмента к оси патрона.
d.
угол наклона кулачков к оси патрона;
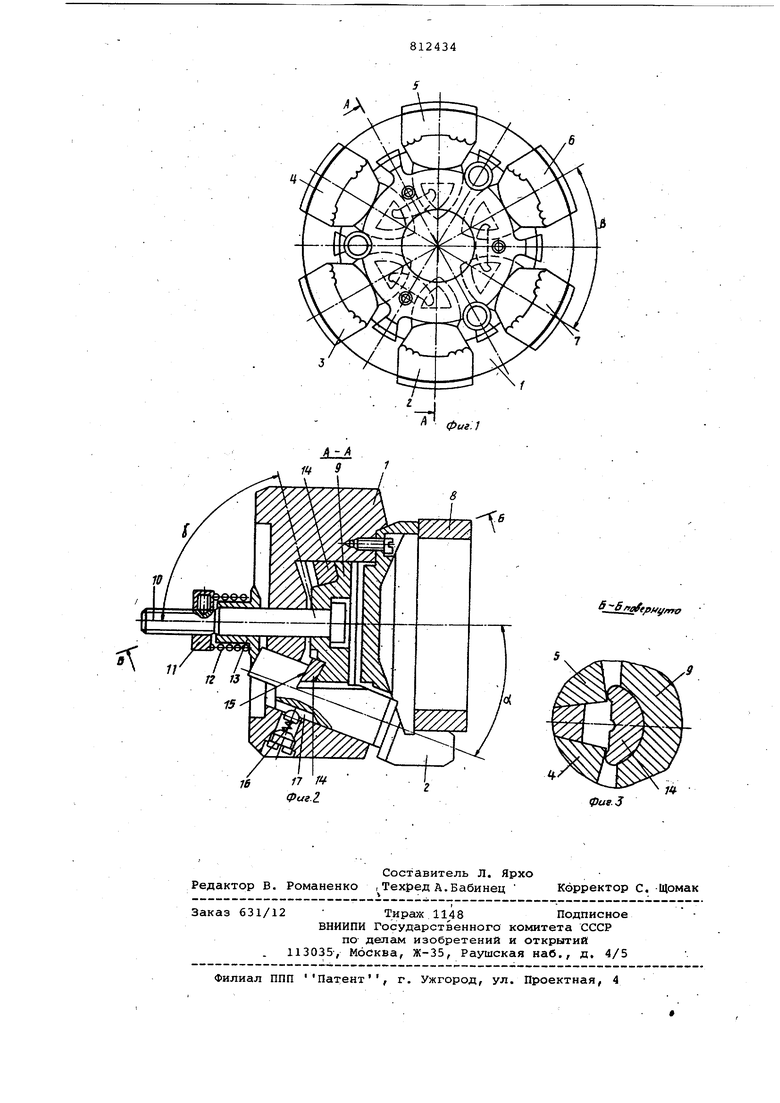
Р - угол между плоскостями, проходящими через оси соседних кулачков и ось патрона. На фиг. 1 схематически изображен
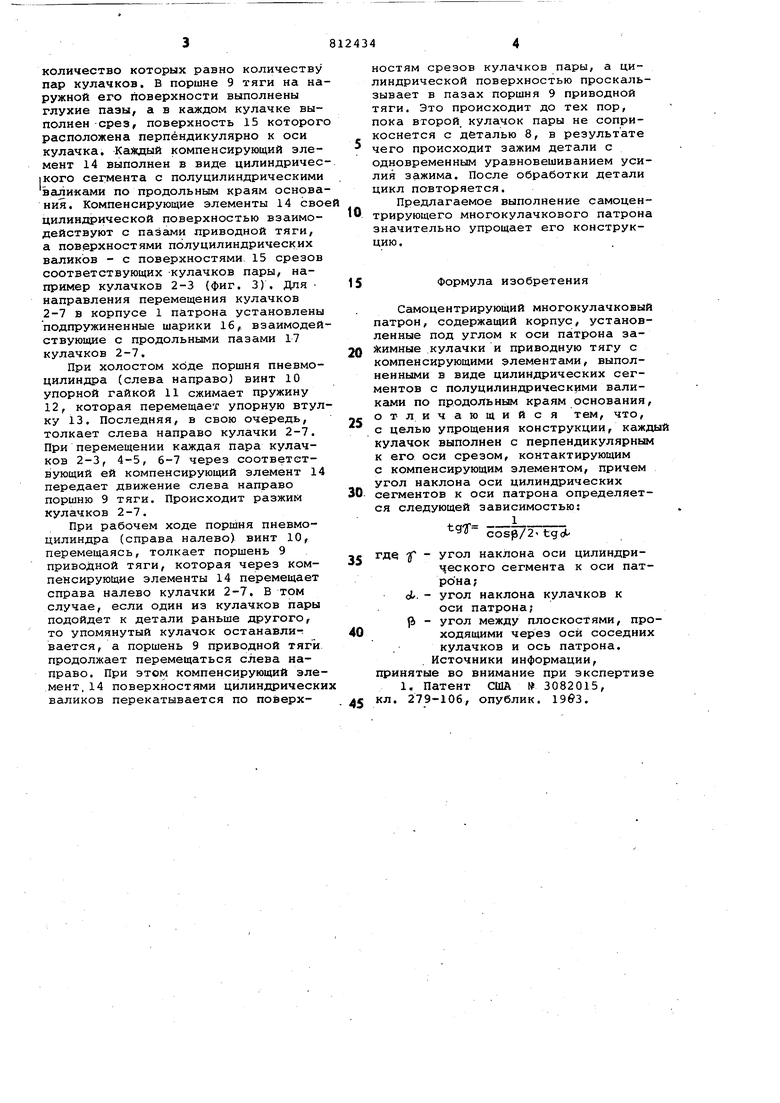
предлагаемый патрон, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2.
Патрон состоит из кордуса 1, закрепленного на шпинделе станка.
В корпусе 1 выполнены шесть отверстий, равномерно расположенных по окружности и под yrjioM к оси вращения патрона. В отверстиях установлены кулачки 2-7, выполненные в
виде пальцев, передняя часть которых имеет форму зажимных кулачков для закрепления детали 8. Кулачки 2-7 связаны между собой тягой, которая состоит из поршня 9 и винта 10, при
помощи которого поршень 9 соединен с поршнем пневмоцилиндра (не показан) . Винт 10 снабжен на конце упорной гайкой 11 и подпружиненной посредством пружины 12 втулкой 13,
имеющей возможность осевого перемещения.
С целью уравновешивания усилий зажима между кулачками пары, например 2-3, 4-5, и 6-7, патрон снабжен компенсирующими элементами 14, количество которых равно количеству пар кулачков. В поршне 9 тяги на на ружной его поверхности выполнены глухие пазы, а в каждом кулачке выполнен срез, поверхность 15 которог расположена перпендикулярно к оси кулачка. Кайсдый компенсирующий элемент 14 выполнен в виде цилиндричес iKoro сегмента с полуцилиндрическими вёшиками по продольным краям основа ния. Компенсирующие элементы 14 сво цилиндрической поверхностью взаимодействуют с пaзcuvJи приводной тяги, а поверхностями полуцилиндрических валиков - с поверхностями. 15 срезов соответствующих -кулачков пары, например кулачков 2-3 (фиг. 3). Для направления перемещения кулачков 2-7 в корпусе 1 патрона установлены подпружиненные шарики 16, взаимодей ствующие с продольными пазами 17 кулачков 2-7. При холостом ходе поршня пневмоцилиндра (слева направо) винт 10 упорной гайкой 11 сжимает пружину 12, которая перемещает упорную втул ку 13. Последняя, в свою очередь, толкает слева направо кулачки 2-7. При перемещении каждая пара кулачков 2-3, 4-5, 6-7 через соответствующий ей компенсирующий элемент 14 передает движение слева направо поршню 9 тяги. Происходит разжим кулачков 2-7. При рабочем ходе поршня пневмоцилиндра (справа налево) винт 10, перемещаясь, толкает поршень 9 приводной тяги, которая через компенсирующие элементы 14 перемещает справа налево кулачки 2-7. В том случае, если один из кулачков пары подойдет к детали раньше другого, то упомянутый кулачок останавли-; вается, а поршень 9 приводной тяги продолжает перемещаться слева направо. При этом компенсирующий элемент, 14 поверхностями цилиндрически валиков перекатывается по поверхностям срезов кулачков пары, а цилиндрической поверхностью проскальзывает в пазах поршня 9 приводной тяги. Это происходит до тех пор, пока второй кулачок пары не соприкоснется с деталью 8, в результате чего происходит зажим детали с одновременным уравновешиванием усилия зажима. После обработки детали цикл повторяется. Предлагаемое выполнение самоцентрирующего многокулачкового патрона значительно упрощает его конструкцию. Формула изобретения Самоцентрирующий многокулачковый патрон, содержащий корпус, установленные под углом к оси патрона заЯсимные кулачки и приводную тягу с компенсирующими элементами, выполненными в виде цилиндрических сегментов с полуцилиндрическ|1ми валиками по продольным краям основания, отличающийся тем, что, с целью упрощения конструкции, каждый кулачок выполнен с перпендикулярным к его оси срезом, контактирующим с компенсирующим элементом, причем угол наклона оси цилиндрических сегментов к оси патрона определяется следующей зависимостью: cosp/2 tgdL где jf - угол наклона оси цилиндрического сегмента к оси патрона;i. - угол наклона кулачков к оси патрона; {i - угол между плоскостями, проходящими через оси соседних кулачков и ось патрона. Источники информации, принятые во внимание при экспертизе 1. Патент США № 3082015, кл. 279-106, опублик. 1963.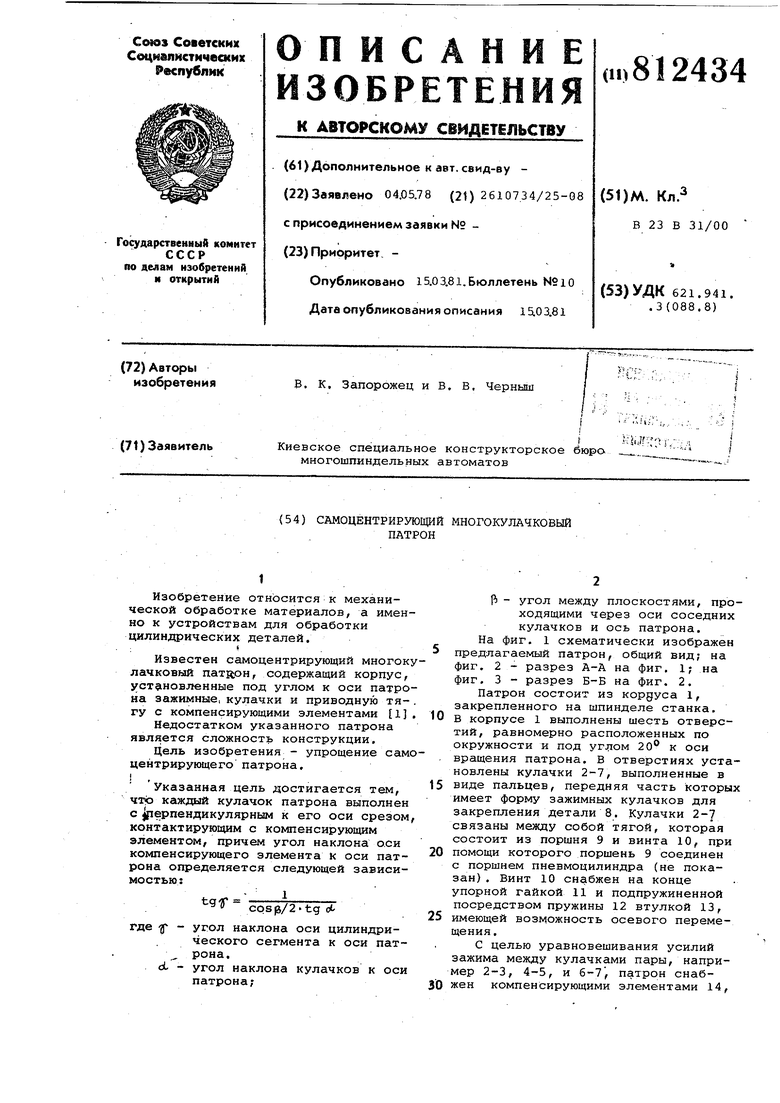
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоцентрирующий многокулачковый патрон | 1982 |
|
SU1065100A1 |
| Многокулачковый самоцентрирующий патрон | 1985 |
|
SU1321531A1 |
| Четырехкулачковый самоцентрирующий патрон | 1985 |
|
SU1268302A1 |
| Самоцентрирующий патрон | 1989 |
|
SU1673299A1 |
| Многокулачковая самоцентрирующая планшайба | 1989 |
|
SU1673293A1 |
| Гидромеханический привод | 1971 |
|
SU443728A1 |
| Двухкулачковый самоцентрирующий патрон | 1979 |
|
SU884876A1 |
| Самоцентрирующий патрон для закрепления эксцентричных деталей | 1988 |
|
SU1572759A1 |
| Многокулачковый самоцентрирующий патрон | 1981 |
|
SU975230A1 |
| Поворотный зажимной патрон | 1983 |
|
SU1093416A1 |