(54) ПОДВИЖНОЙ СОСТАВ


| название | год | авторы | номер документа |
|---|---|---|---|
| Транспортная тележка | 1983 |
|
SU1139659A1 |
| Монорельсовая транспортная система | 1987 |
|
SU1438994A1 |
| Тележечный конвейер | 1988 |
|
SU1578053A1 |
| АВАРИЙНОЕ ТОРМОЗНОЕ УСТРОЙСТВО ТРАНСПОРТНОЙ ТЕЛЕЖКИ | 2003 |
|
RU2234433C1 |
| ЛЕБЕДКА ПРИВОДА ГРУЗОВОЙ ТЕЛЕЖКИ БАШЕННОГО КРАНА | 2003 |
|
RU2249562C1 |
| СТЕНД СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ВЕРХНИЙ КОРСЕТ СТЕНДА, НИЖНИЙ КОРСЕТ СТЕНДА, МЕХАНИЗМ ПОПЕРЕЧНОГО ПЕРЕМЕЩЕНИЯ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, МЕХАНИЗМ ПРОВОРОТА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ПОДЪЕМНЫЙ МЕХАНИЗМ СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, ХОДОВАЯ ОПОРНАЯ ТЕЛЕЖКА СТЕНДА СБОРКИ ОБТЕКАТЕЛЯ ИЗДЕЛИЯ, СПОСОБ СБОРКИ ОБТЕКАТЕЛЯ НА СТЕНДЕ | 2008 |
|
RU2392201C1 |
| Устройство для перемещения и поворота груза | 1983 |
|
SU1142379A1 |
| УСТРОЙСТВО МАНЕВРОВОЕ | 2007 |
|
RU2357885C1 |
| КОЛЕСНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2423281C1 |
| Склад для длинномерных грузов | 1987 |
|
SU1472376A1 |


I
Изобретение относится к железнодорожному транспорту, в частности к конструкциям подвижного состава.
Известен подвижной состав, содержащий по меньшей мере одну приводную и сопряженную с ней одну грузовую тележки, причем грузовая тележка снабжена расположенной на раме промежуточной зубчатой передачей, кинематически связанной с колесной осью, и соединена с п водной тележкой посредством размыкаемых полумуфт 1 .
Недостатками подвижного состава являются трудности и неудобства в обслуживании, низкий уровень обеспечения безопасности работ обслуживающего персонала.
Цель изобретения - улучшение условий обслуживания и повышение безопасиости работы.
Эта цель достигается тем, что подвижиой состав снабжен сцепкой, выполненной в виде дистанционно управляемого поворотного двуплечего рычага, шарнирно установленного на неподвижном упоре, закрепленном на приводной тележке, одно плечо которого снабжено крюком для взаимодействия с клиновым
ром, закрепленным на смежной грузовой тележке, а другое - лапой для взаимодействия со стопором, расположенным на грузовой тележке, который в своем нижнем положении фиксирует полумуфту грузовой тележки.
На фиг. 1 изображен подвижной состав из двух тележек с частичным разрезом, вид сбоку; на фиг. 2 - то же, вид в плане; на . 3 - сцепка в положении сближения приводной и грузовой тележек; на фиг. 4 -
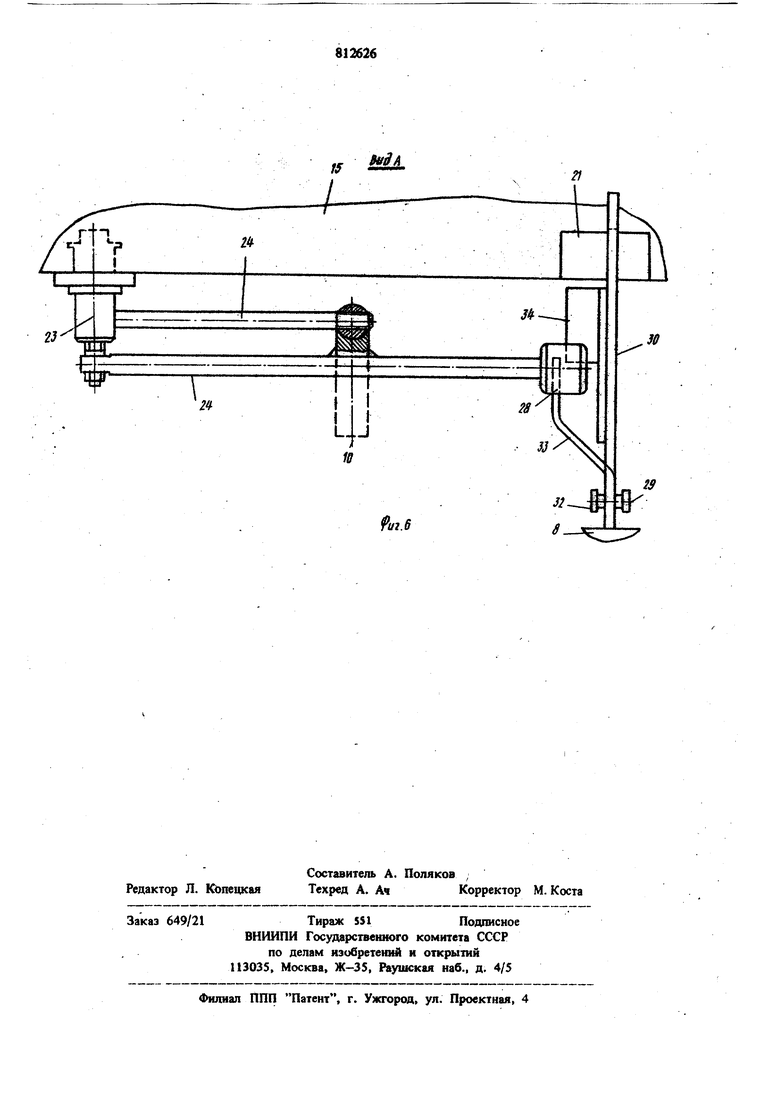
o сцепка в положении начала сцепления; на фиг. 5 - сцепка в положении сцеплена ; на фиг. 6 - стопор, вид А на фиг. 3.
Подвижной состав состоит из двух четырехколесных тележек: приводной 1 и грузовой
5 2. Приводная тележка содержит привод, состоящий из злектродвигателя 3, соединенного муфтой 4 с червячным редуктором 5, на выходном валу которого насажена полумуфта 6. Полумуфта 6 тележки 1 может входить в контакт с полумуфтой 7 грузовой тележки 2. На кожухе 8 муфты 4 приводной тележки 1 жестко закреплена автоматическая сцепка : 9 полумуфт, размещенная параллельно их оси 10 и симметрично относительно колес тележек и рукоятки 11 управления приводной тележкой. Колеса 12 и 13 приводной и грузовой тележек размещены на одних и тех же рельсовых путях 14. Рама 15 грузовой тележки предназначена для удержания 16. К раме крепятся колесные пары и щишндрическо-конический редуктор 17, представляющий собой промежуточную зубчатую передачу между приводом тележки 1, передающим крутящий момент полумуфтам 6 и 7 и приводной колесной осью 18. Быстроходное зубчатое колесо 19, на которое непосредственно передается крутящий момент от приводной тележки, неподвижно крепится на ojowi и тот же вал, что и полумуфта 7, а тихоходаюе 20 жестко крепится к оси 18 двух колес 13 грузовой тележки. К раме 15 также крепятся неподвижно упсч 21 и шарнирно стопор 22, предназна- , ченный для фиксашга грузовой тележки от самопрсжзвольного поворота осей колес при выполнении технологических операций с изделием 16 или его погрузке-разгрузке. Это достигается за счет кинематической связи полумуфты 7, приводной колесной оси 18 и стопора 22. Стопор содержит поворотный относительно горизонтальной оси 23, размещенной в раме 15, стержень 24, в середине несущий выступ 25, который может входить в отверстия 26, насверленные на образующей поверхности 27 полумуфты 7. На конце стержня 24 находится ролик 28. Сцепка 9 предназначена для сцепления полумуфт 6 и 7 в моменты совместного перемещения тележек 1 и 2 при включенном приводе, а также для удобного и быстрого отсоединения приводной тележки, когда грузовая подается с грузом в зону технологической обработки. Кроме того, сцепка обеспечивает автоматическую расфиксацию стопора 22 с полумуфтой 7 при вводе в контакт полумуфты 6 приводной тележки 1 в моменты начала транспортировки Сцепка выполнена в виде размещенного щарнирно на оси 29 двуплечего рычага, на одном пле че имеющего крюк 30, другое плечо которого имеет форму лапы 31. Крюк 30 и лапа 31 установ лены с возможностью их взаимной регулировки. Ось 29 находится в вилке 32 неподвижного :упора 33, жестко прикрепленного к кожуху 8 муфты, 4 приводной тележки 1 по оси последней. Сцепка при введении полумуфт 6 и 7 в контакт может взаимодейство вать крюком 30 со скосом упора 21, рабочей поверхностью 34 лапы 31, а также скосом 35 и опорной псюерхностью 36 неподвиж ного упора 33 с роликом 28 стержня 24. Предлагаемое конструктивное рещение исклю чает возможиость контакта пальцев 37 полуj муфты 6 с шипами 38 полумуфты 7 до выода выступа 25 из отверстия 26 на образую-) ей поверхности 27 полумуфты 7 грузовой ележки. Для дистанционного рассоединения рюка 30 с упором 21 служит тросовое устойство 39, выведенное на одну из рукояток 11, а для пуска и остановки злектродвигатея 3 - эдектрокнопка 40, установленная на ругой рукоятке. На стержне стопора имеет-. я рукоятка (фиг: 6), ось которой совпадает с осью 10 полумуфты для воздействия на стопор в процессе наладки. Электропитание к приводной тележке 1 подводится кабелем (не показан). Подвижной состав работает следующим образом. При загрузке грузовой тележки она расцеплена с приводной. Изделие 16 цеховым подъемно-транспортным средством устанавливается на раму 15, грузовой тележки 2, при этом стопор 22 находится в контакте выступом 25 с одним из отверстий 26 полумуфты 7, этим самым исключается самопроизвольное перемещение колес 13 по рельсовым путям 14 в процессе погрузочной операции. Для подачи грузовой тележки с изделием в технологическую камеру необходимо осуществить их сцепление. Это происходит следующим образом. К грузовой тележке по рельсовым путям 14 подводится приводная тележка и при касании крюком 30 упора 21 лапа 31 подходит под ролик 28. При дальнейшем движении тележки 1 крюк 30, скользя по упору 21, поворачивается на оси 29 в вилке 32 относительно неподвижного упора 33. Одновременно лапа 31, приподнимаясь вместе с крюком 30, путем воздействия на ролик 28 рабочей поверхностью 34 поворачивает стержень 24 относительно горизонтальной оси 23. Далее ролик 28 стопора прокатывается по скосу 35 я опорной поверхности 36, которая при зтом размещена копланарно с поверхностью 34, т.е., они находятся в одной плоскости. В этом положении выступ 25 стопора полностью выходит из одного из отверстий 26 на образующей поверхности 27 полумуфты 7, а пальцы 37 полумуфты 6 входят в контакт с щипaIvш 38 полумуфты 7. Далее крюк 30, опускаясь, захватывает упор 21, сцепляя тележки, а ролик 28 стопора остается в своем верхнем положении на стопорной поверхности 36 неподвижного упора 33. После сцепления приводной и грузовой тележек включением от электрокнопки 40 электродвигателя 3 крутящий движущий момент передается через муфту 4, червячный редуктор 5, полумуфты 6 и 7 на быстроходное зубчатое колесо 19 цилиндрическо-кони|Ческого редуктора, тихоходное колесо 20 коToporo вращает ось 18 колес 13 грузовой тележки. Приводная тележка на колесах 12 .автоматически перемешается вместе с грузовой в технологическую камеру (не показана). В технологической камере привод отключается от электрокнопки 40 или путевого выключателя (не показан), движение прекращается, а крюк 30 тросовым устройством 39 выводится из зацепления с упором 21. Приводная тележка 1 выводится из технологической камеры, а грузовая с изделием остается в камере. После окончания технологического процесса цикл повторяется только за счет реверса, движение осуществляется в обратном на правлении, и подвижной состав подготавливается для загрузки следующим изделием. Одна 1фиводная тележка при необходимости может обслуживать несколько грузовых тележек и несколько технологических постов.
Применение предлагаемого устройства исключает физический труд при транспортировке изделий в технологическую камеру, позволяет осуществлять дистанционное управление загрузкой изделий, что увеличивает производительность труда и повышает культуру производства. «
12626
Формула изобретения Подвижной состав, содержащий по меньшей, мере одну приводную и сопряженную с ней грузовую тележки, причем грузовая тележка снабжена расположенной на раме промежзгточной зубчатой передачей, кинематически связанной с колесной осью, и соединена с привод ной тележки посредством размыкаемых полумуфт, отличающийся тем, что, с целью улучшении условий обслуживания и повьш1с.01я безопасности работы, подвижной состав снабжен сцепкой, выполненной в ввде дистанционного управляемого пов тного двуплечего рычага, шарнирно установленного, на неподвижном упоре, закрепленном на приводной тележке, одно плечо снабжено крюком для взаимодействии с клиновым упором, закрепленным на смежной грузовой тележке, а другое - лапой для взаимодействия со стопором, расположенным на
М грузовой тележке и фиксирующим в своем нижнем положении полумуфту грузовой тележки.
Источники информации, принятые во внимание при экспертизе
2i 1. Ав.торское свидетельство СССР N 407589 кл. В 05 В 15/00, 19.01.70. Г 37 Фиг.}
S
&
33
25
21 ,f M d.
