1
Изобретение относится к складскому хозяйству, предназначено для производства погрузочно-разгрузочных и складских работ.
Цель изобретения - повышение на- дежности.
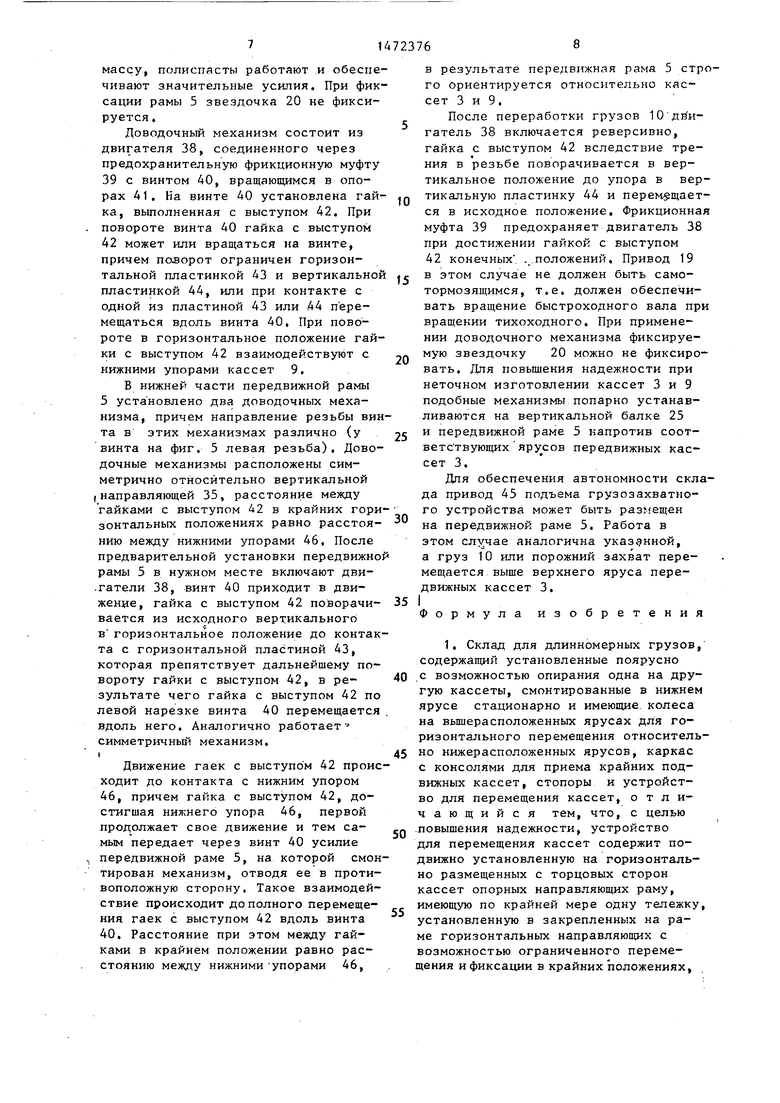
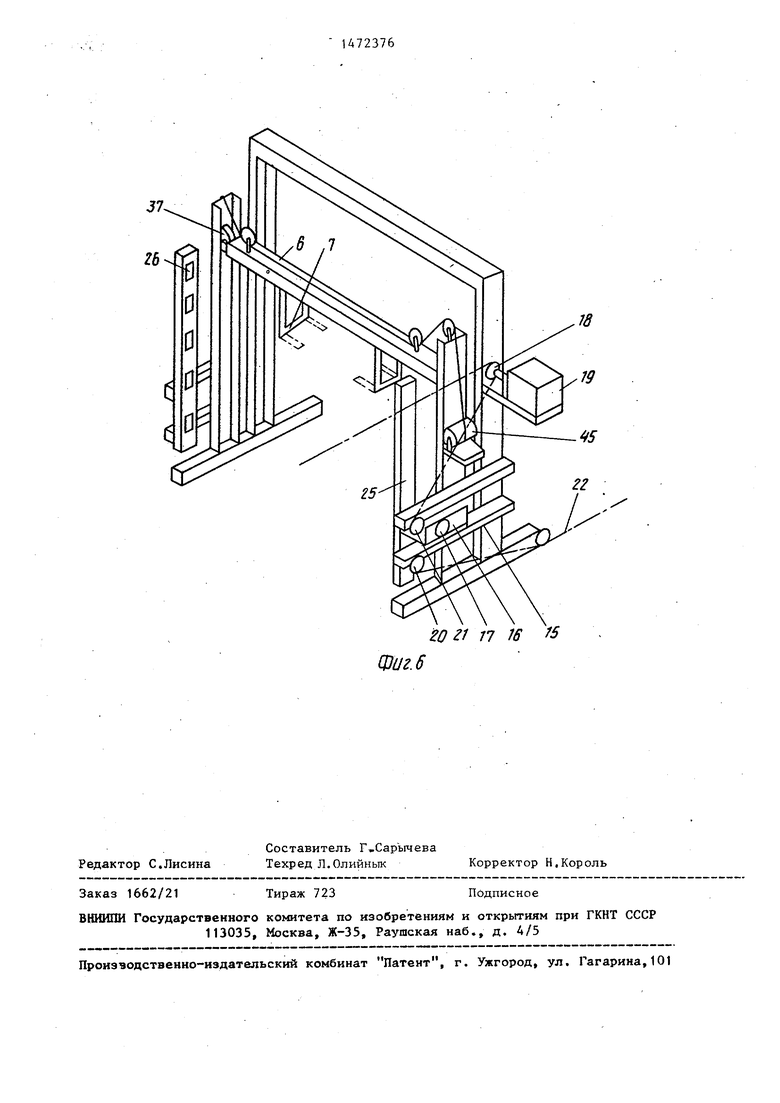
На фиг. 1 схематически изображен предлагаемый склад для длинномерных грузов, общий вид; на фиг. 2 - то же, вид сбоку; на фиг. 3 - то же, перед операцией по взятию груза из стеллажа; на фиг, 4 - узел I на фиг. 2 (штрих-пунктирная линия - узел в положении на фиг. 3); на фиг. 5 - узел II на фиг. 2 (штрих- пунктирная линия - узел в положении на фиг. 3); на фиг. 6 - грузозахватное устройство, вариант выполнения.
В общем случае склад оборудовани грузозахватным устройством 1, наве- шенным на крюк крана 2, передвижными в горизонтальной плоскости
кассетами 3, размещенньми в несколько ярусов, стационарной 4 и передвижной 5 рамами. Грузозахватное .устройство 1 представляет собой балку 6 с поворотными от реверсивного привода (не показан) в горизонтальной плоскости лапами 7 Г-образной формы. Передвижные кассеты 3 снабжены в нижней части колёсами 8, которые опираются на смежные нижерасположенные .кассеты 3. Самый нижний ярус состоит КЗ неподвижных кассет 9, число которых в ярусе на одну больше, чем число передвижных кассет 3 в верхних ярусах. Передвижные кассеты 3 могут перемещаться в одну сторону и обратно относительно нижерасположенных кассет 3 и 9 на расстояние, равное горизонтальному шагу установки кассет 3 и 9. В конструкции кассет 3 и 9 предусмотрены необходимые зазоры для лап 7 при
3
10
15
25
зятии и укладке груза 10, а бокоины кассет 3 могут плотно прилегать одна к другой, т.е. выполнены, напри- ер, плоскими. Со стороны возможного
перемещения передвижных кассет 3 установлена стационарная рама 4, служащая для исключения случайного перемещения передвижных кассет. 3 на расстояние, большее чем величина горизонтального шага установки кассет, и снабженная консолями 11 для перемещения ближайших к ней передвижных кассет 3, что необходимо в случае перемещения передвижных кассет 3 при неподвижной нижерасположенной передвижной кассете 3, Кроме того, все ближние к стационарной раме перевижные кассеты 3 снабжены стопорами 12, расположенными в нижней части JQ передвижных кассет 3 со стороны, примыкающей к стационарной раме 4. Стопоры 12 перекрывают по высоте верхнюю часть нижерасположенной перевижной кассеты 3, С противоположной стороны случайное перемещение передвижных кассет 3 ограничено сто- порами 13, закрепленными в верхней части передвижных кассет 3 и неподвижной кассеты 9. Стопоры 13 перекрывают по высоте нижнюю часть вышерасположенной передвижной кассеты 3, Вдоль торцов кассет 3 и 9 приложены опоры 14, на которых с возможностью горизонтального перемещения установлена передвижная рама 5, Последняя представляет собой П-образную металлоконструкцию, охватывающую кассеты 3 и 9. Возможно и раздельное использование двух отдельных передвижных рам 5, не связанных между собой и установленных по обе стороны кассет 3 и 9, На передвижной раме 5 установлена по крайней мере одна направляющая 15, в которой разещена тележка 16 с возможностью ограниченного горизонтального переещения вдоль направляющей 15 на величину горизонтального шага установки кассет 3 и 9.
На тележке 16 установлена звезочка 17 тележки, а на передвижной аме 5 выше уровня звездочки 17 теежки - приводная звездочка 18 с риводом 19, ниже уровня звездочки 17 тележки - фиксируемая звездочка 20, Кроме того, на передвижной раме 5 установлены отклоняющие звездочи 21, Все указанные звездочки огибает тяговая цепь 22, проходящая в
35
30
50
55
10
15
25
-
JQю472376
плоскости, параллельной торцам кассет 3 и 9. Один конец тяговой цепи 22 закреплен ка уровне неподвижных кассет 9 за габаритом блока кассет 3 и 9, Другой конец тяговой цепи 22 крепится к дополнительной консоли 23, закрепленной на стационарной раме 4,
На своем пути тяговая цепь образует два полиспаста. Первый - при огибании звездочек передвижной рамы 5, где подвижным элементом является звездочка 17 тележки, а неподвижным - фиксируемая звездочка 20 и отклоняющая звездочка 21 (или только отклоняющие звездочки 21).
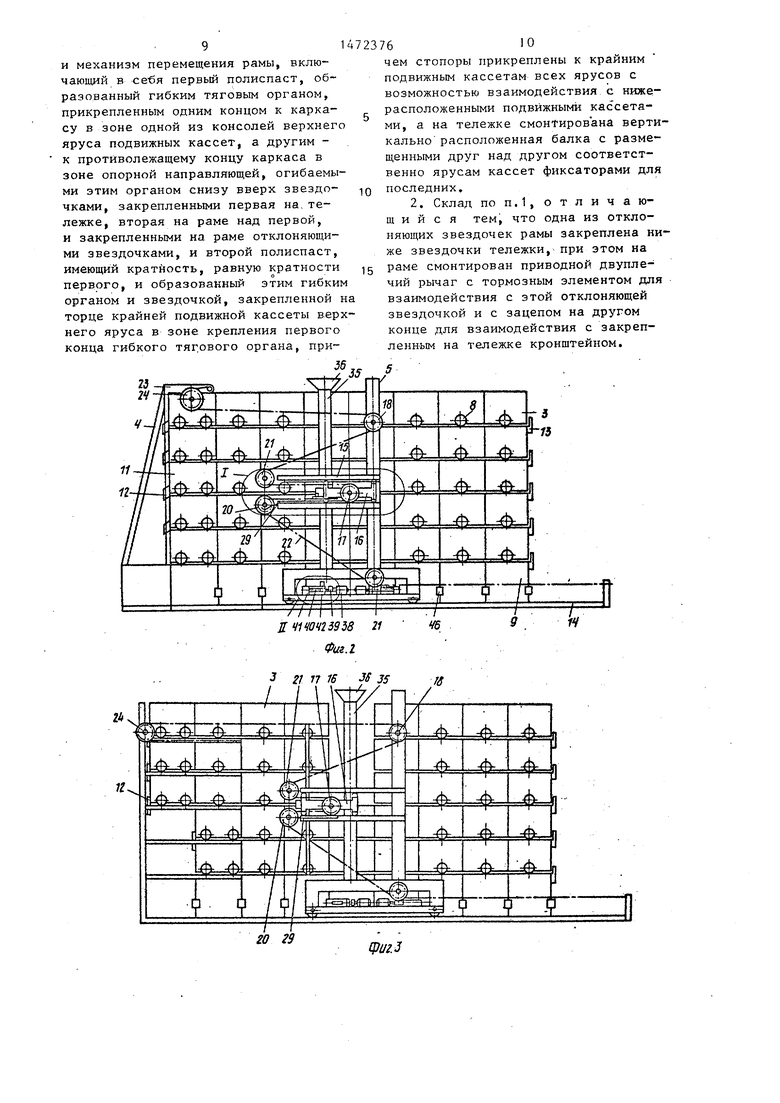
Второй полиспаст образуется при огибании тяговой цепи 22 звездочки 24 кассеты, где подвижным элементом является звездочка 24 кассеты, а неподвижные (включая отклоняющие звездочки 21 при другой кратности полиспаста) закреплены на дополнительной консоли 23. Кратность обоих полиспастов равна и выбирается в зависимости от конкретных условий производительности и грузопереработки. К тележке 16 прикреплена вертикальная балка 25, где вертикально установлен ряд фиксаторов 26, размещенных напротив упоров 27 передвижных кассет 3, Фиксаторы 26 выполнены, например, в виде соленоида или гидротолкателя, шток 28 которого в вьздви35 нутом положении может воздействовать на упоры 27. Тележка 16 и фиксируемая звездочка 20 имеют совместный механизм фиксации, выполненный, например, в виде поворотного дву плечего рычага 29, Один конец рыча- , га 29 имеет отгибку 30, которая в одном из положений рычага 29 упирается в кронштейн 31, закрепленный на тележке 16, а второй конец снаб жен ложементом 32, который может при повороте рычага 29 охватывать поворотную ось 33 фиксируемой звездочки 20, Поворот рычага 29 осуществляется соленоидом 34 или другим элементом, закрепленным на передвижной раме 5, Последняя снабжена вертикальной 3-образной направляющей 35 с ловителями 36, В этом случае на балке 6 закреплены ролики 37 для взаимодействия с вертикальной - образной направляющей 35.
В нижней части передвижной рамы 5 установлен доводочный механизм, состоящий из двигателя 38, соеди30
50
55
ценного через предохранительную фрикционную муфту 39 с винтом 40, установленным в опорах 41. На винте 40 установлена гайка с выступом 42, Поворот гайки на винте ограничен горизонтальной пластинкой 43 и вертикальной пластинкой 44. Грузозахватное устройство вьтолнено в виде горизонтальной балки 6 с Г-образны- ми лапами 7, снабженной роликами 37 и приводом 45 подъема вдоль вертикальной направляющей 35,
Склад для длинномерных грузов, работает следующим образом.
.В исходном положении все передвижные кассеты 3 соприкасаются своими боковинами одна с другой без зазоров, передвижная рама 5 расположена в любом месте опор 14, фиксация рамы 5 осуществляется известными средствами, например магнитами, взаимодействующими с опорами. Тележка 16 установлена в правой части направляющих 15 и зафиксирована от пе- ремещения отгибкой 30 рычага 29. Фиксируемая звездочка 20 имеет возможность свободного вращения,
Для работы грузозахватного устройства 1 необходимо обеспечить вертикальный колодец над выбранной кассетой 3 или 9. Для этого передвижная рама 5 перемещается вращением приводной звездочки 18 приводом 19 и занимает такое положение, при. котором фиксаторы 26, закрепленные на вертикальной балке 25, устанавливаются напротив упоров 27 передвижных кассет 3, которые необходимо сдвинуть на один горизонтальный, шаг установки кассеты 3 для образования колодца. Фиксаторы 26, закрепленные на передвижной ,раме 5, располагаются напротив упоров 27.
Фиксаторы 26, выдвигая штоки 28, входят в зацепление с упорами 27 кассет 3, которые нужно сдвинуть. Соленоиды 34 поворачивают рычаг 29, при этом огибка 30 выходит из зацепления с кронштейном 31 тележки 16 и ке препятствует ее перемещению. Одновременно ложемент 32 предотвращает возможньй поворот фиксируемой звездочки 20 при перемещении тяговой цеТележка 16 при выборке полиспаста перемещается влево на-расстояние, равное горизонтальному шагу установки Кассет 3 и 9, и штоками 28 фиксаторов 26 перемещает передвижные кассеты 3, которые проходят такой же путь. Фиксаторы 26, размещенные на передвижной раме 5, взаимодействуют с упорами 27 передвижных кассет 3, Последние снабжены одной парой колес 8, так как фиксаторы 26 удерживают кассеты 3 от опрокидыва- ния. Перемещение каких-либо передвижных кассет 3 в любом случае вызывает перемещение крайней верхней передвижной кассеты 3, при этом звездочка 24 кассеты, перемещаясь, становится подвижным элементом поли- спаста обратного действия и исключается провисание тяговой цепи 22,
В образованный колодец до нужной кассеты 3 или 9 опускается грузозахватное устройство 1 и осуществляется процесс переработки грузов 10, Для облегчения наводки лап 7 на находящиеся в глубине колодца кассеты 3 или 9 с помощью ловителей 36 в вертикальную направляющую 35 вводятся ролики 37 грузозахватного устройства 1.
20
25
30
35
40
45
По окончании операции грузопере- работки грузозахватное устройство 1 выводится из образованного колодца и перемещается к месту следующей операции. Затем приводом 19 приводная звездочка 18 вращается по часовой стрелке, при этом полиспаст со звездочкой 24 кассеты выполняет функ ции полиспаста прямого действия, а со звездочкой 17 тележки - полиспаст обратного действия, Фиксируемая звездочка 20 исключает перемещение передвижной рамы 5, При возврате тележки 16 и фиксаторов 26 в исходно положение, высвобождении фиксируемой
50
звездочки 20 и фиксации тележки 16 в крайнем правом полг(х;ении передвижная рама 5 следует к месту следующей операции. При перемещении передвижной рамы 5 система упомяну- пи 22, Приводом 19 приводится во вра- 55 тых полиспастов не работает, усилия щение против часовой стрелки при- перемещения незначительны,- а ско- водная звездочка 18, При этом тяго- . рость движения может быть высокой, вая цепь 22, перемещаясь, выбирает При перемещении передвижных кассет .полис.п аст прямого действия, образо- 3 с грузом 10, имеющих значительную
10
15
72376 . 6
ванный звездочкой 17 тележки, фиксируемой звездочкой 20 и отклоняющей звездочкой 21,
Тележка 16 при выборке полиспаста перемещается влево на-расстояние, равное горизонтальному шагу установки Кассет 3 и 9, и штоками 28 фиксаторов 26 перемещает передвижные кассеты 3, которые проходят такой же путь. Фиксаторы 26, размещенные на передвижной раме 5, взаимодействуют с упорами 27 передвижных кассет 3, Последние снабжены одной парой колес 8, так как фиксаторы 26 удерживают кассеты 3 от опрокидыва- ния. Перемещение каких-либо передвижных кассет 3 в любом случае вызывает перемещение крайней верхней передвижной кассеты 3, при этом звездочка 24 кассеты, перемещаясь, становится подвижным элементом поли- спаста обратного действия и исключается провисание тяговой цепи 22,
В образованный колодец до нужной кассеты 3 или 9 опускается грузозахватное устройство 1 и осуществляется процесс переработки грузов 10, Для облегчения наводки лап 7 на находящиеся в глубине колодца кассеты 3 или 9 с помощью ловителей 36 в вертикальную направляющую 35 вводятся ролики 37 грузозахватного устройства 1.
20
25
30
По окончании операции грузопере- работки грузозахватное устройство 1 выводится из образованного колодца и перемещается к месту следующей операции. Затем приводом 19 приводная звездочка 18 вращается по часовой стрелке, при этом полиспаст со звездочкой 24 кассеты выполняет функции полиспаста прямого действия, а со звездочкой 17 тележки - полиспаста обратного действия, Фиксируемая звездочка 20 исключает перемещение передвижной рамы 5, При возврате тележки 16 и фиксаторов 26 в исходное положение, высвобождении фиксируемой
массу, полиспясты работают и обеспечивают значительные усилия. При фиксации рамы 5 звездочка 20 не фиксируется .
Доводочный механизм состоит из двигателя 38, соединенного через предохранительную фрикционную муфту 39 с винтом 40, вращающимся в опорах А1, Ка винте 40 установлена гайка, выполненная с выступом 42, При повороте винта 40 гайка с выступом 42 может или вращаться на винте, причем поаорот ограничен горизонтальной пластинкой 43 и вертикальной пластинкой 44, или при контакте с одной из пластиной 43 или ,44 перемещаться вдоль винта 40, При повороте в горизонтальное положение гайки с выступом 42 взаимодействуют с нижними упорами кассет 9.
В нижней части передвижной рамы 5 уста новлено два доводочных механизма, причем направление резьбы вин
:
та в этих механизмах различно (у винта на фиг. 5 левая резьба). Доводочные механизмы расположены симметрично относительно вертикальной (Направляющей 35, расстояние между гайками с выступом 42 в крайних гори зонтальных положениях равно расстоя
нию между нижними упорами 46, После предварительной установки передвижно рамы 5 в нужном месте включают дви- .гатели 38, винт 40 приходит в движение, гайка с выступом 42 поворачи- вается из исходного вертикального в горизонтальное положение до контакта с горизонтальной пластиной 43, которая препятствует дальнейшему повороту гайки с выступом 42, в результате чего гайка с выступом 42 по левой нарезке винта 40 перемещается вдоль него. Аналогично работает
симметричный механизм. I
Движение гаек с выступом 42 происходит до контакта с нижним упором 46, причем гайка с выступом 42, достигшая нилшего упора 46, первой продолжает свое движение и тем самым передает через винт 40 усилие передвижной раме 5, на которой смонтирован механизм, отводя ее в противоположную сторону. Такое взаимодействие происходит до полного перемещения гаек с выступом 42 вдоль винта 40. Расстояние при этом между гайками в крайнем положении равно расстоянию между нижними упорами 46,
10
|г20
25
30
;
35 I
в результате передвижная рама 5 строго ориентируется относительно кассет 3 и 9,
После переработки грузов 10 дйи- гатель 38 включается реверсивно, гайка с выступом 42 вследствие трения в резьбе поворачивается в вертикальное положение до упора в вертикальную пластинку 44 и перем щает- ся в исходное положение. Фрикционная муфта 39 предохраняет двигатель 38 при достижении гайкой с выступом 42 конечных . ..положений. Привод 19 в этом случае не должен быть самотормозящимся, т.е, должен обеспечивать вращение быстроходного вала при вращении тихоходного. При применении доводочного механизма фиксируемую звездочку 20 можно не фиксировать. Для повышения надежности при неточном изготовлении кассет 3 и 9 подобные механизмы попарно устанавливаются на вертикальной балке 25 и передвижной раме 5 напротив соот- ветс твующих яру сов передвижных кассет 3,
Для обеспечения автономности склада привод 45 подъема грузозахватного устройства может быть размещен на передвижной раме 5. Работа в этом случае аналогична указанной, а груз 10 или порожний захват перемещается выше верхнего яруса передвижных кассет 3,
. Формула изобретения
I
1, Склад для длинномерных грузов, содержащий установленные поярусно с возможностью опирания одна на другую кассеты, смонтированные в нижнем ярусе стационарно и имеющие, колеса на вьш1ерасположенных ярусах для горизонтального перемещения относительно нижерасположенных ярусов, каркас с консолями для приема крайних подвижных кассет, стопоры и устройство для перемещения кассет, отличающийся тем, что, с целью .повышения надежности, устройство для перемещения кассет содержит подвижно установленную на горизонтально размещенных с торцовых сторон кассет опорных направляющих раму, имеющую по крайней мере одну тележку, установленную в закрепленных на раме горизонтальных направляющих с возможностью ограниченного перемещения и фиксации в крайних положениях.

| название | год | авторы | номер документа |
|---|---|---|---|
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| Склад для хранения штучных грузов | 1990 |
|
SU1779656A1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2002 |
|
RU2223216C1 |
| УСТРОЙСТВО ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ ГРУЗА | 2001 |
|
RU2189938C1 |
| Склад для хранения штучных грузов | 1985 |
|
SU1324958A1 |
| Устройство для шаговых перемещений груза | 1989 |
|
SU1698155A1 |
| Грузовая тележка мостового крана | 1990 |
|
SU1766826A1 |
| УСТРОЙСТВО ДЛЯ ХРАНЕНИЯ ШТУЧНЫХ ГРУЗОВ | 2004 |
|
RU2278230C1 |
| МОСТОВОЙ КРАН | 1969 |
|
SU248935A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
Изобретение относится к оборудованию складов. Цель изобретения - повышение надежности. Склад состоит из блока передвижных кассет 3, размещенных в несколько ярусов. Кассеты каждого яруса плотно прилегают друг к другу и могут перемещаться возвратно-поступательно на расстояние, равное шагу установки кассет. Перемещение кассет обеспечивает передвижная (от привода)рама 5, установленная на опорах, размещенных вдоль ярусов кассет. Рама может быть зафиксирована в любом месте опоры. С торцов кассет натянута тяговая цепь 22, один конец которой неподвижно закреплен на уровне нижнего яруса, а второй на уровне верхнего. На своем пути цепь образует два полиспаста, подвижные элементы (звездочки) одного из них закреплены на тележках, установленных в горизонтальных направляющих передвижной рамы, а подвижные элементы другого - на крайней верхней кассете. Приводная звездочка этих полиспастов расположена между ними и поэтому при вращении приводной звездочки один из полиспастов становится полиспастом прямого действия, а другой - обратного. На тележках передвижной рамы 5 установлена вертикальная балка 25 с фиксаторами, которые при выдвижении их взаимодействуют с упорами кассет. При перемещении тележек перемещаются кассеты, против которых сработали фиксаторы, обеспечивая доступ грузозахватного устройства к нужной кассете. При этом полиспаст, образованный подвижными элементами, закрепленными на тележках, является прямым. Излишек цепи выбирается обратным полиспастом крайней верхней кассеты. Для возврата в исходное положение звездочка включается реверсивно и направление полиспастов меняется. Фиксация рамы может быть обеспечена электромагнитами или фиксируемой звездочкой, расположенной в нижней части передвижной рамы, при этом на раме установлен дополнительный вертикальный ряд фиксаторов, взаимодействующих с упорами кассет. Для облегчения наводки захвата на груз передвижная рама снабжена вертикальной направляющей, а грузозахватное устройство, установленное на кране, снабжено роликами. В нижней части передвижной рамы установлен доводочный механизм, который состоит из приводного винта и гайки, выполненной с выступом, причем гайка может занимать вертикальное или горизонтальное положение благодаря наличию направляющих и, перемещаясь вдоль винта, взаимодействовать с упорами нижнего яруса кассет. 1 з.п.ф-лы, 6 ил.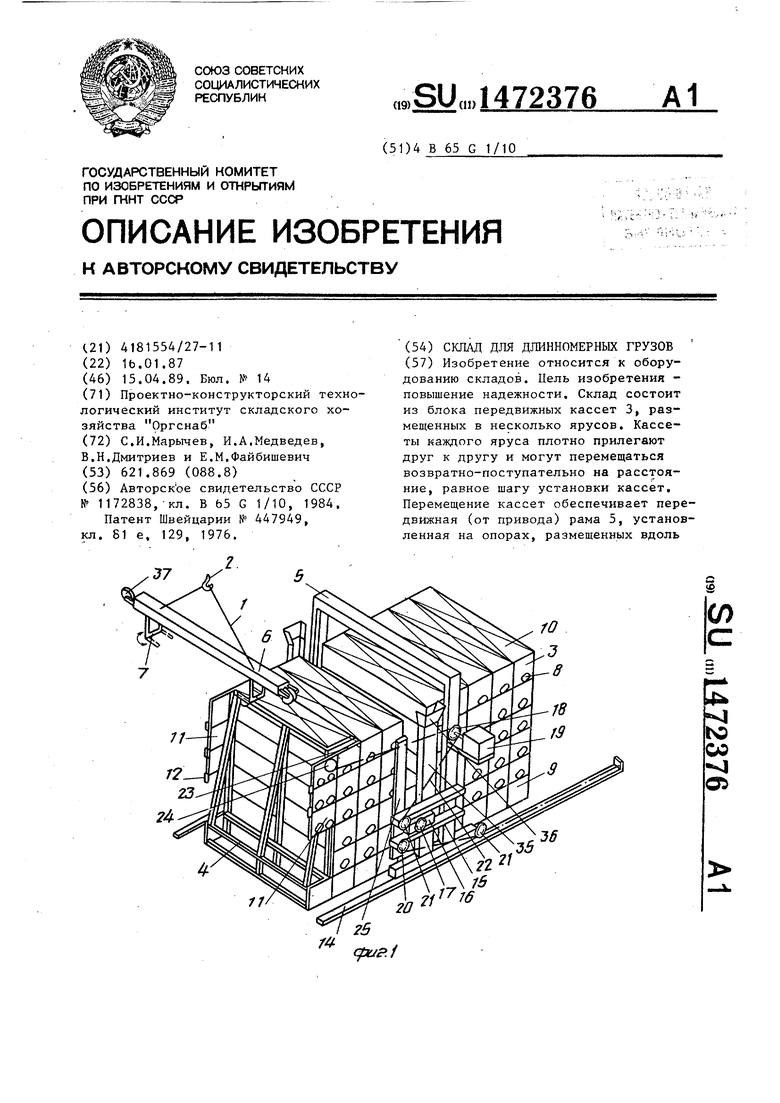
го 29
(Раг.з
w
дЗ
52
30
Фиг.
CPU г. 5
Редактор С.Лисина
Составитель Г.Сарычева Техред Л.Олийньтк
Заказ 1662/21
Тираж 723
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
ZO 21 77 W 5
Фиг. 6
Корректор Н.КорОЛЬ
Подписное
| Авторск ое свидетельство СССР № 1172838,-кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Патент Швейцарии № 447949, кл | |||
| Горный компас | 0 |
|
SU81A1 |
