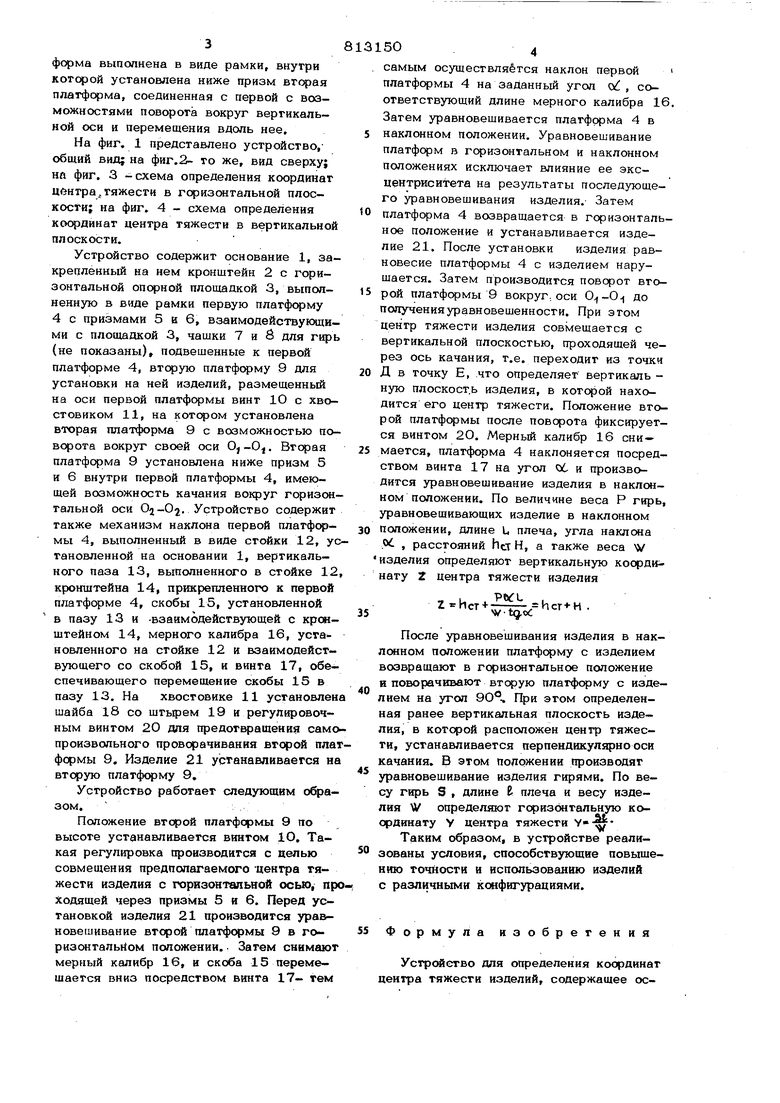
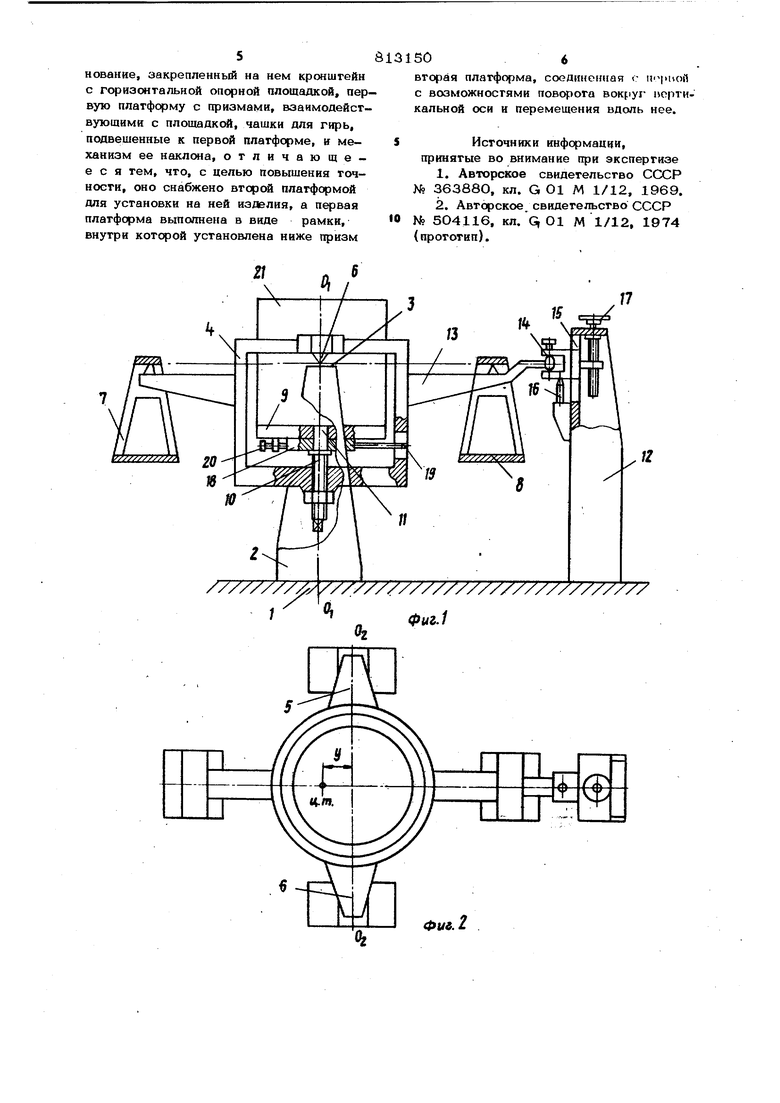
Изобретение относится к измерительной технике и может быть использовано для определения координат центра тяжести различных изделий. Известно устройство для определения координат центра тяжести изделий, содержащее основание, платформу для установки на ней изделий, установленную на основании с возможностью качаний вокруг двух горизонтальных взаимно-перпендикулярных осей, и боковые опоры для платформы, выполненные в виде маятников с регулируемой длиной 111. Недостатком устройства является то, что оно не позволяет определить три координаты центра тяжести изделия за одну установку. Для определения вертикальной координаты центра тяжести необходимо повернуть изделие в вертикальной пло скости на 90 , что требует больших затрат времени и снижает точность измерений. Наиболее близким по технической сущности к предложенному является устройство для определения координат центра тяжести изделий, содержащее основание, закрепленный на нем кронштейн с горизонтальной опорной площадкой, первую платформу с призмами, взаимодействующими с площадкой, чащки для гирь, подвешенные к первсй платформе, и механизм ее наклона 12. Недостатком данного устройства является то, что в нем велико расстояние между осями качания платформы и центром тяжести изделия, и отсутствует регулировка этого расстояния. В результате образуется большое смещение центра тяжести в горизонтальной плоскости, требующее увеличения веса гирь, уравновещивающих платформу. Таким образом, при наклоне изделия имеет место уменьшение точности измерений. Цель изобретения - повышение точности. Поставленная цель достигается тем, что оно снабжено второй платформой для установки на ней изделия, а первая платформа выполнена в виде рамки, внугри котсрой устаноЕлена ниже призм вторая платформа, соединенная с первой с возможностями поворота вокруг вертикальной оси и перемещения вдоль нее. На фиг. 1 представлено устройство, общий вид; на фиг.2- то же, вид сверху; на фиг. 3 -схема определения координат центра,тяжести в горизонтальной плоскости; на фиг, 4 - схема определения координат центра тяжести в вертикальной плоскости. Устройство содержит основание 1, закрепленный на нем кронштейн 2 с горизонтальной опорной площадкой 3, выполненную в виде рамки первую платформу 4 с призмами 5 и 6, взаимодействующими с площагжой 3, чашки 7 и S для гирь (не показаны) подвешенные к первой платформе 4, алатф(фму 9 для установки на ней изделий, размещенньй на оси первой платформы винт 10 с хвостовиком 11, на котором установлена вторая платформа 9 с возможностью поворота вокруг своей оси Oj -О, Вторая платформа 9 установлена ниже призм 5 и 6 внутри первой платформы 4, имеющей возможность качания вокруг горизон тальной оси Oj-02, Устройство содержит также механизм наклона первой платформы 4, выполненный в виде стойки 12, у тановленной на основании 1, вертикального паза 13, выполненного в стойке 12 кронштейна 14, прикрепленного к первой платформе 4, скобы 15, установленной в пазу 13 и -взаимодействующей с кршштейном 14, мерного калибра 16, установленного на стойке 12 и взаимодействующего со скобой 15, и винта 17, обеспечивающего перемещение скобы 15 в пазу 13. На хвостовике 11 установлен шайба 18 со штырем 19 и регулировочным винтом 20 для предотвращения само произвольного проворачивания вгорой пла формы 9. Изделие 21 усганавливаегся н втqpyю платф му 9. Устройство работает следующим образом. Положение втсрой платформы 9 по высоте устанавливается винтом 10, Такая регулировка производится с нелью совмещения предполагаемого -центра тяжести изделия с горизонтальной осью, пр ходящей через призмы 5 и 6. Перед установкой изделия 21 производится уравновешивание второй платформы 9 в горизонтальйом положении. Затем снимаю мерный калибр 16, и скоба 15 перемешается вниз посредством винта 17- тем 504 самым осуществляется наклон первой платформы 4 на заданный угол с , соответствующий длине мерного калибра 16, Затем уравновешивается платформа 4 в наклонном положении. Уравновешивание платформ в горизонтальном и наклонном положениях исключает влияние ее эксцентриситета на результаты последующего уравновешивания изделия.- Затем платформа 4 возвращается в горизонтальное положение и устанавливается изделие 21. После установки изделия равновесие платформы 4 с изделием нарушается. Затем производится поворот второй платформы 9 вокруг оси до получения уравновешенности. При этом центр тяжести изделия совмещается с вертикальной плоскостью, гфоходящей через ось качания, т.е. переходит из точки Д в точку Е, .что определяет вертикаль ную плоскост.ь изделия, в которой находится его центр тяжести. Положение второй платфсрмы после поворота фиксируется винтом 20. Мерный калибр 16 сни- мается, платформа 4 наклоняется посредством винта 17 на угол об и производится уравновешивание изделия в наклонном положении. По величине веса Р гирь, уравновешивающих изделие в наклонном положении, длине L, плеча, угла наклона .0 , расстояний Нет Н, а также веса W изделия определяют вертикальную коорди нату 2 центра тяжести изделия - - - После уравновешивания изделия в наклонном положении платформу с изделием возвращают в горизонтальное положение и поворачивают вторую платформу с изделием на угол 9О°, При этом определенная ранее вертикальная плоскость изделия, в которой расположен центр тяжести, устанавливается перпендикулярно оси качания. В этом положении производят уравновешивание изделия гирями. По весу гирь S , длине Е. плеча и весу изделия W определяют горизонтальную координату Y центра тяжести V-- Таким образом, в устройстве реализованы условия, способствующие повьшению точности и использованию изделий с различными конфигурациями. Формула изобретения Устройство для определения координат центра тяжести изделий, содержащее основание, закрепленный на нем кроншгейн с горизонтальной опорной площадкой, аервую платформу с призмами, взаимодействующими с площадке, чашки для гирь, подвешенные к первой платформе, и механизм ее наклона, отличающееся тем, что, с целью повышения точности, оно снабжено второй платформой для установки на ней изделия, а первая платформа выполнена в виде рамки, внутри которой установлена ниже призм
131506
вторая платформа, соединоЕшая с с возможностями поворота вокрух иортикальной оси и перемещения вдоль нее.
5Источники информации,
принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 363880, кл. G О1 М 1/12, 1969.
2.Авторское; свидетельство СССР «О № 504116, кл.QOI М 1/12, 1974
(прототип).
Фиг.2
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для определения координат центра масс изделий | 1984 |
|
SU1229619A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| ПРИБОР ДЛЯ ОПРЕДЕЛЕНИЯ ВЕСА И КООРДИНАТ ЦЕНТРА | 1969 |
|
SU237416A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| СССР | 1973 |
|
SU363880A1 |
| Стенд для определения координат центра тяжести тела | 1989 |
|
SU1728689A1 |
| Способ определения координат центра масс изделия | 1980 |
|
SU868380A1 |
| КОМПЛЕКС ДЛЯ ПОВЕРКИ И КАЛИБРОВКИ СКВАЖИННЫХ ИНКЛИНОМЕТРОВ | 2010 |
|
RU2439493C1 |
| Поверочные весы | 1985 |
|
SU1302146A1 |

