Изобретение относится к общему машиностроению.
Известны устройства для определения координат центра тяжести, содержащие стол с центральной и боковыми опорами, размещенными во взаимно перпендикулярных плоскостях, перпендикулярных плоскости стола, и уровнями контроля положения равновесия стола.
В предлагаемом устройстве его боковые опоры вынолнены в виде качающихся маятников регулируемой длины, снабженных дополнительными плечами, расположенными под углом 90° к стержням маятников.
Такое выполнение устройства повышает точность определения координат и обеспечивает возможность регулирования чувствительности и устойчивости устройства.
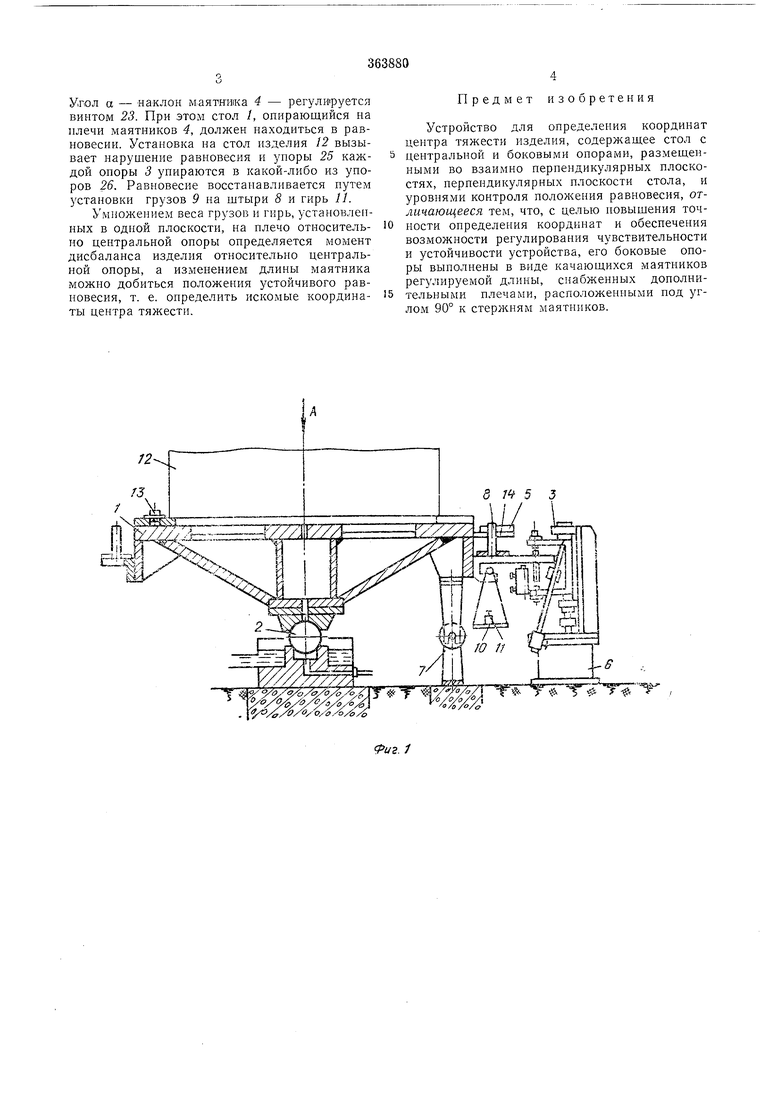
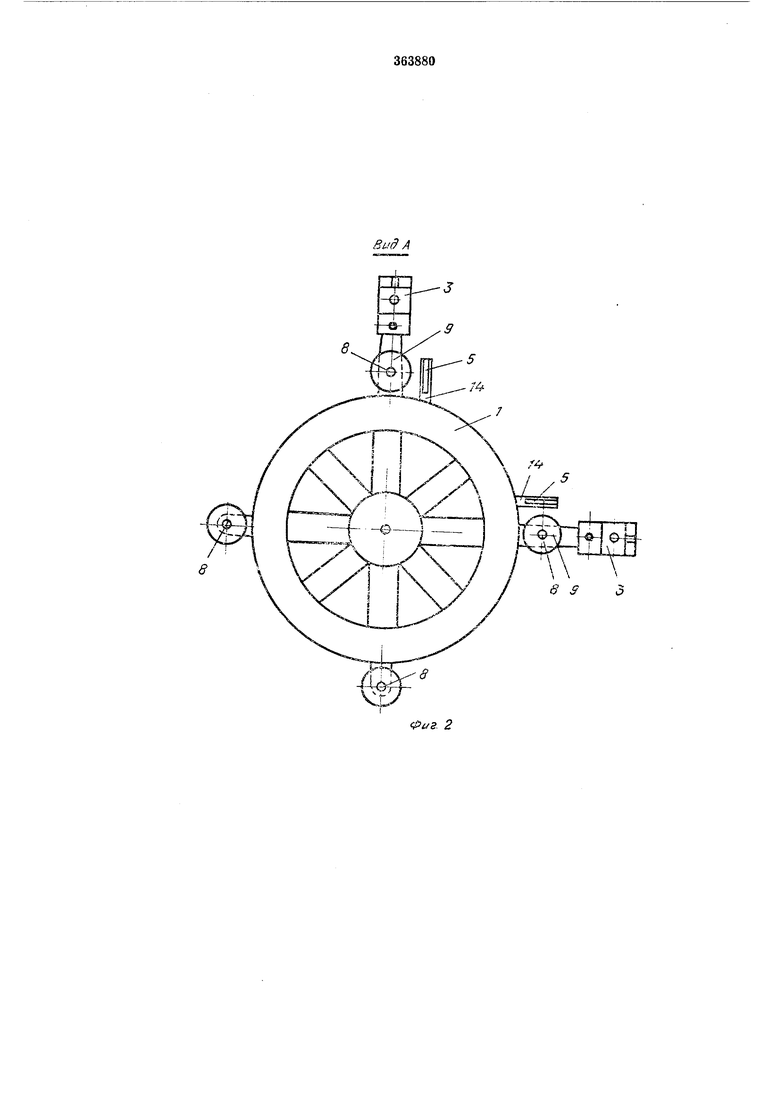
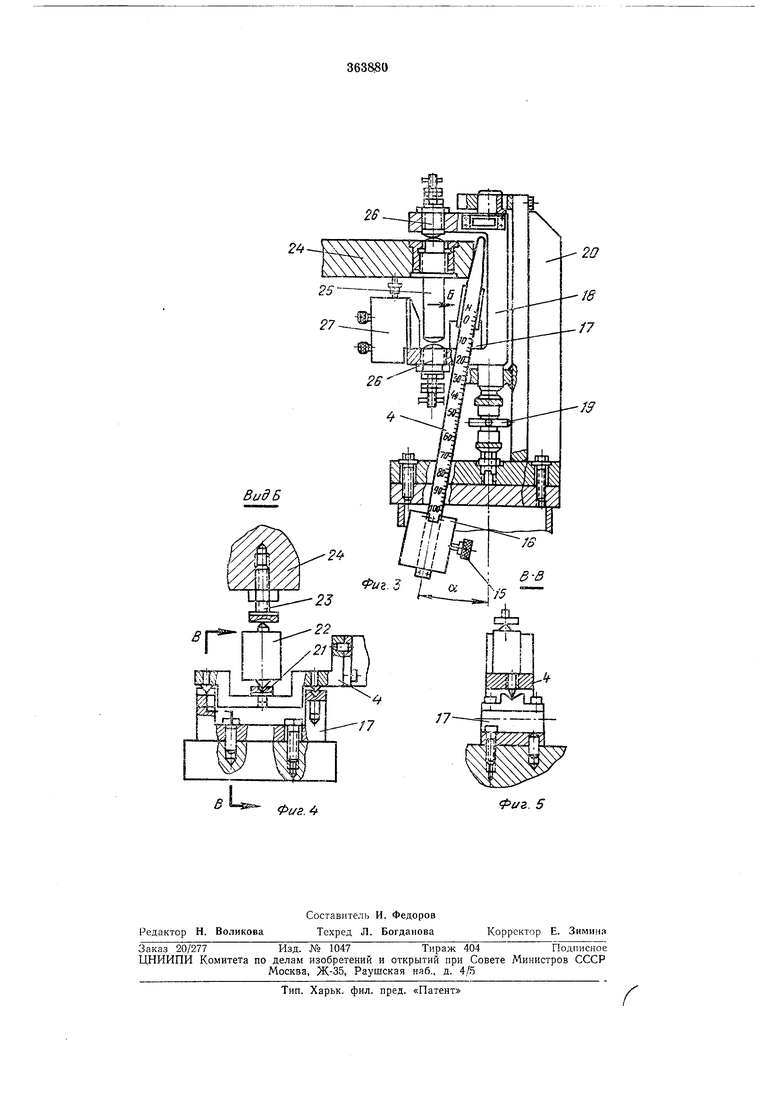
На фиг. 1 изображено предлагаемое устройство в разрезе, общий вид; на фиг. 2 - вид по стрелке А на фиг. 1; на фиг. 3 - конструкция боковых опор; на фиг. 4 - вид но стрелке Б на фиг. 3; на фиг. 5 - сечение по В-В на фиг. 4.
Устройство содержит стол 1, центральную опору 2, представляющую собой гидростатическую пяту, две боковые опоры 3, выполненные в виде качающихся маятников 4, регулируемой длины, снабженных дополнительными плечами, расположенными под углом 90° к
2
стержням маятников, н уровни 5 контроля положения равновесия.
Оноры 3 установлены на ту.мбах 6 и расположены во взаимно перпендикулярных вертикальных плоскостях. От поворота относительно вертикальной оси стол удерживается стонором 7. Штыри 8 служат для установки грузов 9, а платформы 10 - для размещения гирь 7/, уравновешивающих дисбаланс издеЛИЯ 12, размещаемого болта.ми 13 на столе 1. Уровни 5 установлены на кронштейнах 14. Маятник 4 с закрепленным на нем при помощи винта 15 грузом 16 онирается на опору с призмами 17, расположенную на скобе 18,
которая подвижно установлена при помощи гайки 19 на стойке 20. На плече .маятника, на некотором расстоян1 н от его опор, размещен сухарь 21, на который через толкатель 22 и регулировочный винт 23 онирается кронштейн 24 стола. Упоры 25 и 26 предназначены для ограничения хода кронщтейна 24. Электроконтактный датчик 27 служит для сигнализации отклонения стола от среднего положения.
Устройство работает следующи.м образом.
Стол / устанавливается горизонтально по уровням 5. Ноложение скобы регулируется так, чтобы контакты датчика 27 были в среднем положении, а упоров 26 - так, чтобы по обоим концам уноров 25 был одинаковый зазор.
Угол а - наклон маятника 4 - регулируется винтом 23. При этом стол /, опирающийся на плечи маятников 4, должен находиться в равновесии. Установка на стол изделия 12 вызывает нарушение равновесия и уноры 25 каждой опоры 3 упираются в какой-либо из упоров 26. Равновесие восстанавливается путем установки грузов 9 на штыри 8 и гирь 11.
Умножением веса грузов и гирь, установленных в одиой плоскости, на плечо относительно центральной опоры определяется момент дисбаланса изделия относительно центральной опоры, а изменением длины маятника можно добиться положения устойчивого равновесия, т. е. определить искомые координаты центра тяжести.
Предмет изобретения
Устройство для определения координат центра тяжести изделия, содержащее стол с центральной и боковыми опорами, размещенными во взаимно перпендикулярных плоскостях, перпендикулярных плоскости стола, и уровнями контроля положения равновесия, отличающееся тем, что, с целью повыщения точности определения координат и обеспечения возможности регулирования чувствительности и устойчивости устройства, его боковые опоры выполнены в виде качающихся маятников регулируемой длины, снабженных дополнительными плечами, расположенными под углом 90° к стержням маятников.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ определения координат центра масс изделия | 1980 |
|
SU868380A1 |
| Устройство для определенияКООРдиНАТ цЕНТРА ТяжЕСТи издЕлий | 1977 |
|
SU813150A1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАССЫ И ПОЛОЖЕНИЯ ЦЕНТРА МАСС ИЗДЕЛИЯ | 2011 |
|
RU2476843C1 |
| Устройство для определения координат центра масс | 1986 |
|
SU1428966A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ КООРДИНАТ ЦЕНТРА МАСС ИЗДЕЛИЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1992 |
|
RU2027159C1 |
| УСТРОЙСТВО ДЛЯ СТАТИЧЕСКОЙ БАЛАНСИРОВКИ ЛОПАСТЕЙ ВИНТОВ ВЕРТОЛЕТОВ | 2005 |
|
RU2311624C2 |
| Маятник Яримова | 2024 |
|
RU2838586C1 |
| Способ определения погрешности стенда для измерения характеристик геометрии масс изделий и устройство для его осуществления | 2019 |
|
RU2722962C1 |
| Устройство для определения массы и трех координат центра масс изделия | 1983 |
|
SU1128127A1 |
| Способ определения координат центра тяжести изделий | 1978 |
|
SU789692A1 |
J
Фиг. 2
2
в
Фиг. 4
Фиг. 5
