Известны устройства для автоматического контроля и сортировки деталей по их размерам с применением электрической индукционной мерительной головки, включенной в схему моста сопротивлений, с автоматической компенсацией.
В описываемом устройстве в качестве основного исполнительного органа сортировки деталей предусмотрен привод, при помощи которого в момент наступления равновесия моста воронка, перемещаясь, останавливается против приемника соответствующих деталей.
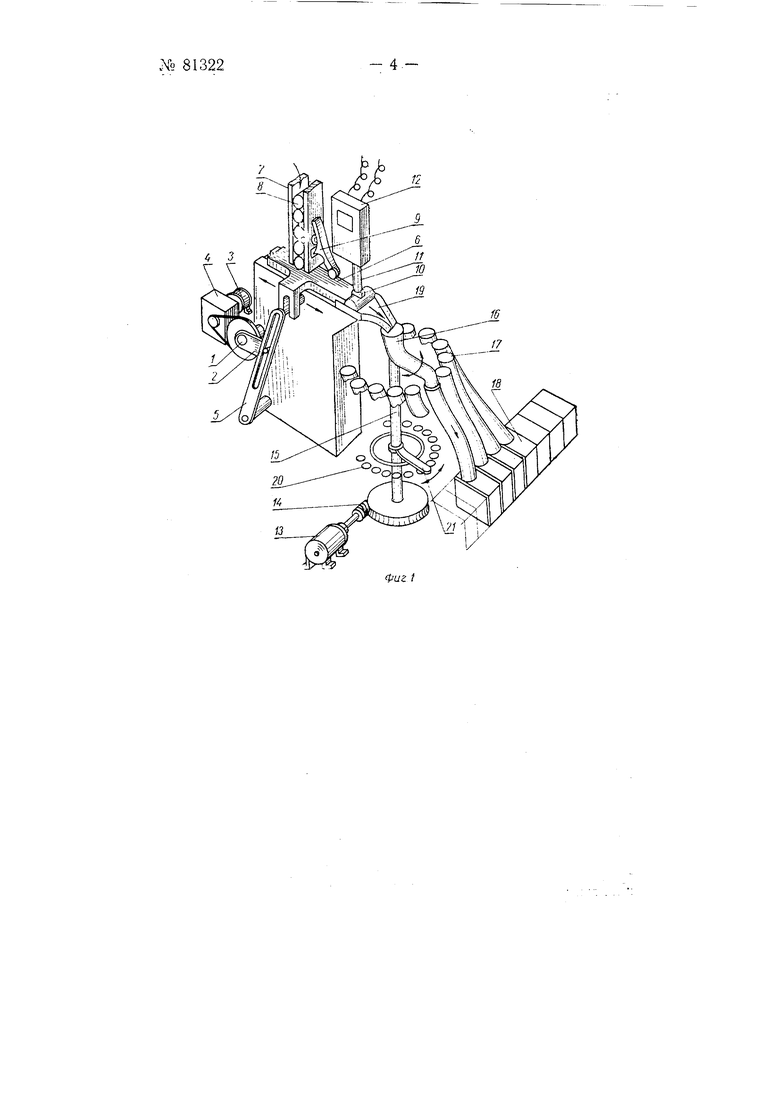
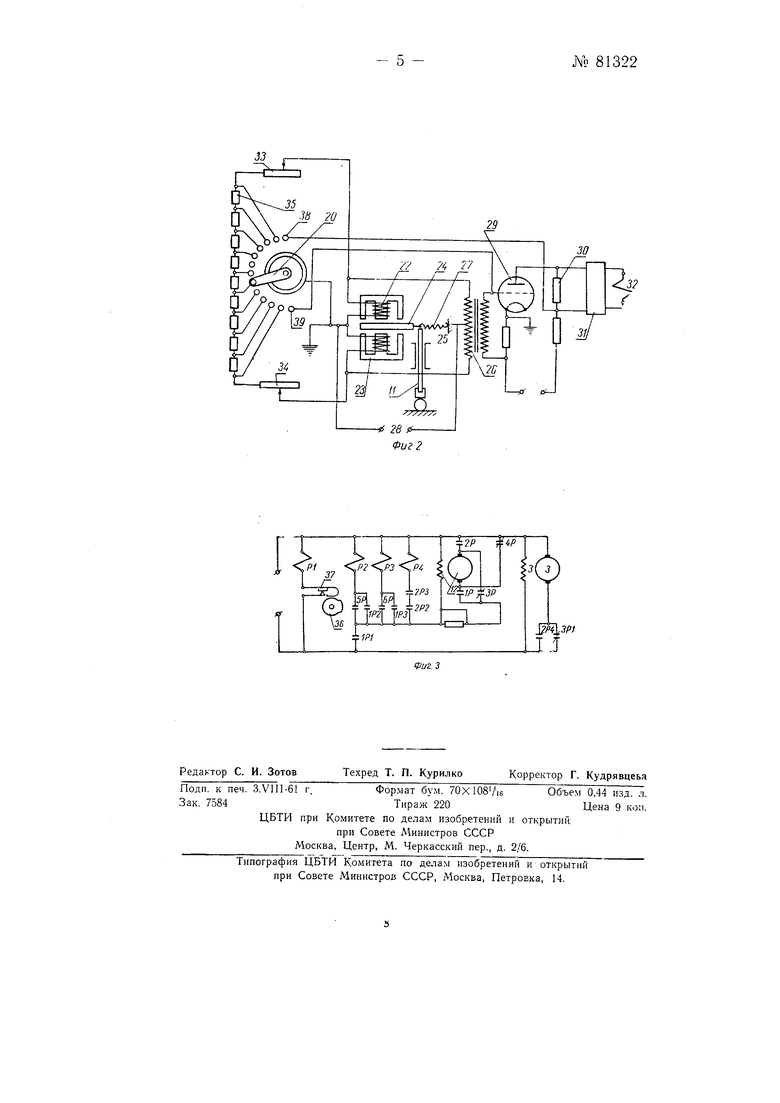
На фиг. 1 изображена кинематическая схема устройства; на фиг. 2 и 3-принципиальные схемы устройства.
Устройство состоит из следующих основных узлов: 1) измерительного органа, выполненного из индукционной мерительной головки; 2) электрической части, выполненной по схеме с компенсирующим сопротивлением, промежуточного электронного блока, электронного усилителя с реле управлением, следящего привода и противоколебательной системы; 3) загрузочного бункера; 4) механизма подачи деталей на мерительную позицию; 5) исполнительного механизма сортировки.
Основным ведущим звеном является вал / (фиг. 1) с кривошипом 2. Вал приводится во вращение электродвигателем 3 посредством редуктора 4. Кривошип 2 заставляет кулису 5 совершать колебательные движения и тем самым осуществлять возвратно-поступательные движения толкателя 6 по направляющим станины.
Когда толкатель 6 занимает крайнее левое положение, из подводящего канала 7 выпадает очередная деталь 8. Канал 7 связан с бункером, куда нагружают сортируемые детали. При выпадении очередной детали 8 зуб собачки 9 войдет внутрь канала 7 и отсечет тем самым остальные детали. При последующем продвижении толкателя 6 вперед выпавшая деталь проталкивается на мерительную головку 10 и прижимается мерительны.м шпинделем // индукционной мерительной головки 12 и ка
12
привод 13; схема перестает реагировать на сигналы мерительной индукционной rOvTOBKH, а за этот период вытолкнутая деталь успевает пройтч через поворотную воронку в предназначенный для нее приемник.
В случае, если под контроль попадает деталь бракованная, имеющая размер выше верхнего предела допуска, переключатель сопротивлений 21, двигаясь по часовой стрелке, заходит за крайний контакт и попадает на ограничительный контакт 38. Это приводит к обесточиванию нагрузки 30 и срабатыванию реле 32. Следящий привод срабатывает и деталь выталкивается в приемник для деталей, бракованных по верхнему пределу.
В случае же попадания под контроль детали, забракованной по нилснему пределу, переключатель сопротивлений 21 заходит на ограничительный контакт 39, благодаря чему происходит отпирание лампы 29, создающей разность потенциалов на нагрузке 30. В результате реле 32 обесточивается. Аналогично работает следящий привод и деталь выталкивается в приемник для деталей, забракованных по нижнему пределу.
С целью уменьщения угловой амплитуды качания поворотной воронки во время работы следящего привода в схеме предусмотрена противоколебательная система, состоящая из трех реле Р2, РЗ и Р4.
При срабатывании реле Р1 и замыкания его контакта /Р/ срабатывает одно из реле Р2 или РЗ. Последнее зависит от того, в каком положении находится переключатель сопротивлений 21 в момент замыкания контакта 1PL Если переключатель сопротивлений 21 находится в положении, перешедшем состояние баланса моста, реле 32 сработает, вследствие чего его контакт 5Р замкнется и приведет к срабатыванию реле Р2, блокирующего себя через свой контакт 1Р2.
Если переключатель сопротивлений 21 находится до положения баланса моста, реле 32 окажется в нерабочем состоянии, благодаря чему его контакт 6Р замкнется и приведет к срабатыванию реле РЗ, блокирующего себя через свой контакт 1РЗ.
В схеме предусмотрена контактная система, выключающая электродвигатель 3 привода кулисы на тот период, пока переключатель сопротивлений 21, а следовательно, и поворотная воронка не подойдет к положению равновесия моста.
Контактная система состоит из контактов 2Р4 и ЗР1, включенных в цепь якоря электродвигателя 3.
Подача напряжения на якорь электродвигателя 3 начинается только после срабатывания реле Р4 (контакт 2Р4) и прекращается после срабатывания реле Р1 (контакт ЗР1).
Реле Р4 работает тогда, когда замкнуты контакты 2РЗ и 2Р2, которые замыкаются при срабатывании реле Р2 н РЗ. Во время вращения переключателя сопротивлений 21 электродвигатель 3 не работает.
Предмет изобретения
Устройство для автоматического контроля и сортировки деталей по их размерам с применением электрической индукционной мерительной головки, включенной в схему моста сопротивления с автоматической компенсацией посредством введенного в диагональ моста сопротивления электрического двигателя, приводящего во вращение переключатель сопротивлений двух плеч моста до восстановления равновесия последнего, отличающееся тем, что ось переключателя сопротивлений механически связана с предназначенной для поступления промеренных деталей вращающейся воронкой, поочередно по мере ее вращения устанавливающейся против каждого из расположенных по окружности приемных ящиков с той целью, чтобы в .момент наступления равновесия моста сопротивления происходила бы остановка воронки против соответствующего приемника.
- 3 -№ 81322
У
30

3PI
JJ
