I Изобретение относится к автоматическому регулированию и управлению, а именно к бинарным системам, и пред назначено для автоматического управления вынужденным движением линейных динамических объектов, параметры которых меняются произвольно неконтролируемым образом в любых ограниченных пределах;. Предполагается, что объект управления описывается уравнением v(tho,()1...0f(tJv{i u{tl4c(t)...4d(ttf(t), где а , (t) - переменные параметры объекта, меняющиеся в известных диапазонах a;6a.(t)6o(| , (i -f,...,n) ; известные константы; d.(tl- переменные параметры не стационарных каналов воздействия на объект внешних.возмущений f(t) удовле воряющие условиям .(t) , (} 1,...,К) ; известные константы. Задача управления состоит в сведении до заданной величины ошибки регулирования x(t) y5(t) - y(t), где у (t) const задающее воздей ствие, т.е. в вы полнении нераве ства /x(t)/ Л , где и - заданная постоянная положительная величина, при любом состоян системы и при обеспечении условия малой зависимости свойств управляем процессов от меняющихся параметров объекта регулирования и от внешних сил. Известна самонастраивающаяся сис тема, состоящая из объекта управления, сумматоров, блоков сравнения усилителей, дифференциаторов, умно жителей, релейного и модульных элементов и корректирующего звена Низкая надежность, наличие высо кочастотных переключений сигнала уп- 35
равления, высокая чувс- вительность к внешним воздействиям являются недостатками системы.
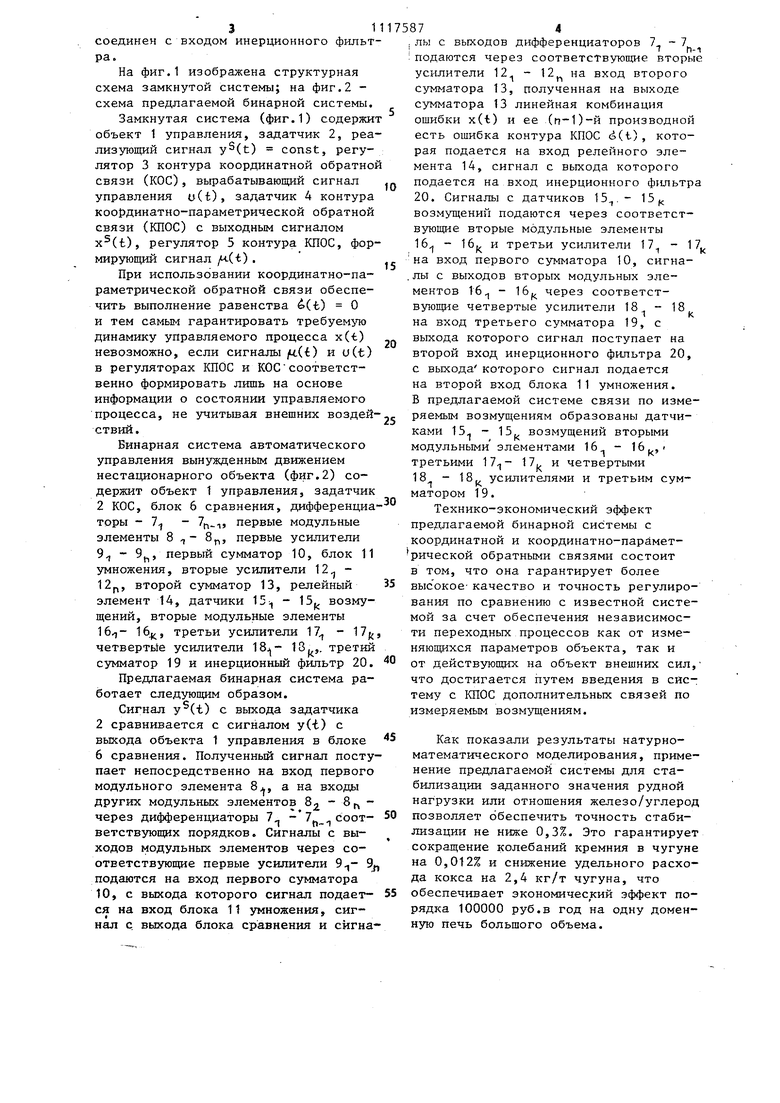
модульных злементов через соответствующие четвертые усилители - к входу третьего сумматора, выход которого 7 Наиболее близкой к изобретению является система автоматического управления с координатно-параметрической обратной связью, содержащая последовательно соединенные первый сумматор, умножитель, объект управления, блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения через соответствующие вторые усилители соединены с входом второго сумматора и через соответствующие последовательно соединенные модульныеэлементы и первые усилители с входом первого cyiviMaTopa, выход второго сумматора подключен к входу релейного элемента, последовательно соединенного с инерционным фильтром, которого подключен к второму входу умножителя f 2 Недостатком известной схемы является высокая чувствительность к внешним возмущениям, невозможность обеспечения заданного качества регулирования при действии на этот объект внешних . с ил т Цель изобретения - повышение точности системы при действии измеряемых помех по нестационарным каналам. Поставленная цель достигается тем, что в бинарную систему управления вынужденным движением, содержащую последовательно соединенные первый сумматор, блок умножения, объект управления, блок сравнения, второй вход которого соединен с выходом задатчика, а выход - с входами дифференциаторов, выходы которых и выход блока сравнения через соответствующие вторые усилители соединены с входом второго сумматора и через последовательно соединенные модульные элементы и первые усилители с входом первого сумматора, выход второго сумматора подключен через релейный элемент к входу инерционного фильтра, выход которого соединен с вторым входом блока умножения, введены датчики возмущений, вторые модульные элементы, третьи и четвертые усилители и третий сумматор, выход каждого датчика через последовательно соединенные соответствующие вторые к одульные элементы и третьи усилители подсоединен к входу первого сумматора, а выходы вторых 31 соединен с входом инерционного фильт ра. На фиг.1 изображена структурная схема замкнутой системы; на фиг.2 схема предлагаемой бинарной системы. Замкнутая система (фиг.1) содержи объект 1 управления, задатчик 2, реа лизующий сигнал y2(t) const, регулятор 3 контура координатной обратно связи (кос), вьфабатывающий сигнал управления o(t), задатчик 4 контура координатно-параметрической обратной связи (КПСС) с выходным сигналом x(t), регулятор 5 контура КПОС, фор мирующий сигнал /u.(t) . При использовании координатно-параметрической обратной связи обеспечить выполнение равенства 6(t) 0 и тем самым гарантировать требуемую динамику управляемого процесса x(t) невозможно, если сигналы /u.(t) и u(t) в регуляторах КПОС и КОСсоответственно формировать лишь на основе информации о состоянии управляемого процесса, не учитьшая внешних воздей ствий. Бинарная система автоматического управления вынужденным движением нестационарного объекта (фиг.2) содержит объект 1 управления, задатчик 2 КОС, блок 6 сравнения, дифференциа торы - 7 7f,T, первые модульные элементы 8 - 8, первые усилители 9 - 9, первый сумматор 10, блок 11 умножения, вторые усилители 12 12р,, второй сумматор 13, релейный элемент 14, датчики 15:, - 15 возмущений, вторые модульные элементы 16, третьи усилители 17 - ITj, четвертые усилители 18,,. третий сумматор 19 и инерционный фильтр 20. Предлагаемая бинарная система работает следующим образом. Сигнал y(t) с выхода задатчика 2 сравнивается с сигналом y(t) с выхода объекта 1 управления в блоке 6 сравнения. Полученный сигнал посту пает непосредственно на вход первого модульного элемента 8, а на входы других модульных элементов 8 8 j через дифференциаторы 7 -7, соответствующих порядков. Сигналы с выходов модульных элементов через соответствующие первые усилители 9 подаются на вход первого сумматора 10, с выхода которого сигнал подается на вход блока 11 умножения, сигнал с выхода блока сравнения и сигна 874 лы с выходов дифференциаторов подаются через соответствующие вторые усилители 12 - 12 на вход второго сумматора 13, полученная на выходе сумматора 13 линейная комбинация ошибки x(t) и ее (п-1)-й производной есть ошибка контура КПОС e(t), которая подается на вход релейного элемента 14, сигнал с выхода которого подается на вход инерционного фильтра 20. Сигналы с датчиков 15.- 15 возмущений подаются через соответствующие вторые модульные элементы 16 - 16| и третьи усилители 17 - 17 на вход первого сумматора 10, сигналы с выходов вторых модульных элементов 16 - 16 через соответствующие четвертые усилители 18 - 18 на вход третьего сумматора 19, с выхода которого сигнал поступает на второй вход инерционного фильтра 20, с выхода которого сигнал подается на второй вход блока 11 умножения. В предлагаемой системе связи по измеряемым возмущениям образованы датчиками 15 - 15, возмущений вторыми модульными элементами 16 - 16,третьими 17,, и четвертыми 18 - 18 усилителями и третьим сумматором 19. Технико-экономический эффект предлагаемой бинарной системы с координатной и координатно-параметрической обратньми связями состоит в том, что она гарантирует более высокое- качество и точность регулирования по сравнению с известной системой за счет обеспечения независимости переходных процессов как от изменяющихся параметров объекта, так и от действующих на объект внешних сил, что достигается путем введения в систему с КПОС дополнительных связей по измеряемым возмущениям. Как показали результаты натурноматематического моделирования, применение предлагаемой системы для стабилизации заданного значения рудной нагрузки или отношения железо/углерод позволяет обеспечить точность стабилизации не ниже 0,3%. Это гарантирует сокращение колебаний кремния в чугуне на 0,012% и снижение удельного расхода кокса на 2,4 кг/т чугуна, что обеспечивает экономический эффект порядка 100000 руб.в год на одну доменную печь большого объема.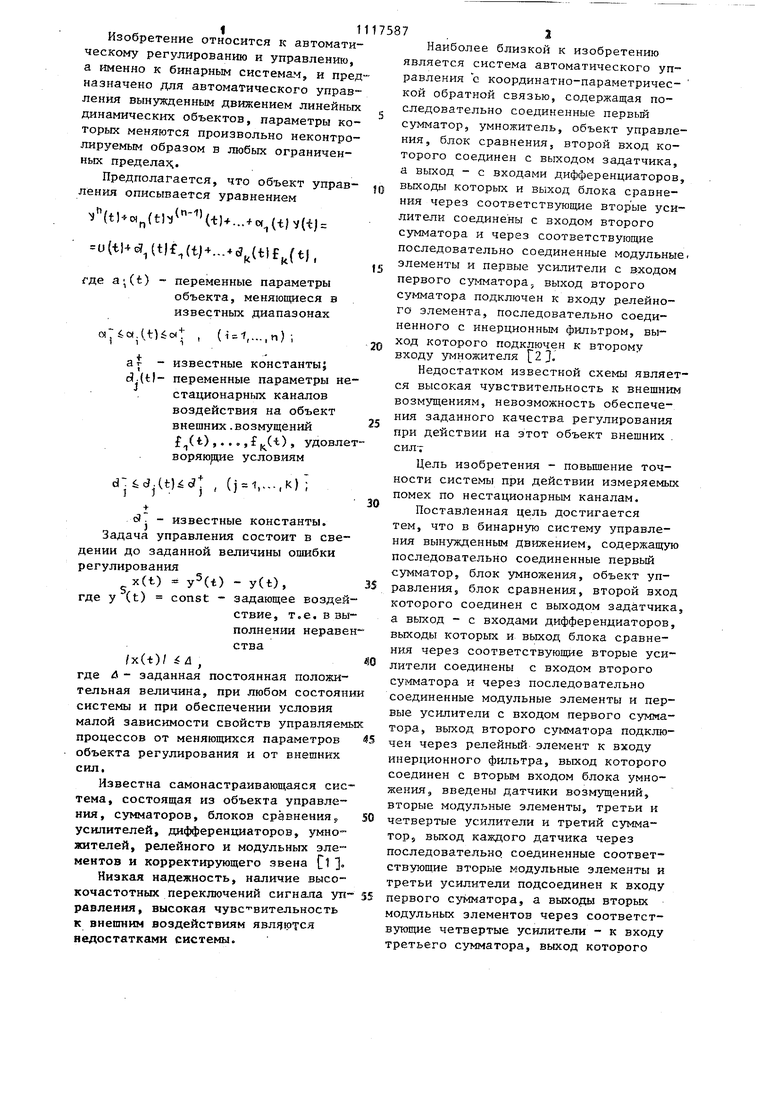
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления | 1984 |
|
SU1140095A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления | 1988 |
|
SU1640670A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система управления | 1985 |
|
SU1303993A1 |
| Бинарная система управления объектами с запаздыванием | 1986 |
|
SU1383294A1 |
БИНАРНАЯ СИСТЕМА УПРАВЛЕНИЯ ВЬШУЖДЕННЬМ ДВИЖЕНИЕМ, содержащая последовательно соединенные первый сумматор, блок умножения, объект управления, блок сравнения, второй вход которого соединен с выходом зада тчика, а выход - с входами дифференциаторов, выходы которых и вькод блока сравнения через соответствующие вторые усилители соединены с входом второго сумматора и через последовательно соединенные модульные элементы и первые усилители с входом первого сумматора, выход второго сумматора подключен через релейный элемент к входу инерционного фильтра, выход которого соединен с вторым входом блока умножения, отличающаяся тем, что, с целью повышения точности системы при действии измеряемых помех по нестационарным каналам, она содержит датчики возмущений, вторые модульные элементы, третьи и четвертые усилители и третий сумматор, выход каждого датчика возмущений через со(Л ответствующие последовательно соединенные вторые модульные элементы и третьи усилители подключен к входу первого сумматора, а выходы вторых модульных элементов через соответствующие четвертые усилители - к входу третьего сумматора, выход которого соединен с вторым входом инерционного фильтра. ел 00 ч1
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Соколов Н.И | |||
| Эквивалентные адаптивным и адаптивные САУ | |||
| - Лекции по курсу Теория автоматического регулирования | |||
| Ч | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство двукратного усилителя с катодными лампами | 1920 |
|
SU55A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Авторское свидетельство СССР по заявке № 3613801/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
