Изобретение относится к автоматическому управлению, построено в рамках бинарных систем автоматического управления и применимо для управления линейными динамическими объектами при действии измеряемых помех по нестационарным каналам и при произвольном неконтролируемом изменении параметров обтхекта в любых ограничен ных пределах. Изобретение ориентировано на обьекты, динамика которых описьшается уравнением y(t)a(t)(t)+ ..,+a(t)y(t) U(t)H-dij(t)f (t)+ ...+d(t)f(t). где aj(t) (, .,., n), d;(t) ( 999 K/ .соответственно переменные параметры .объекта и переменные параметры нестационарных каналов воздействия на объект внешних возмущений ), .. удовлетворяющие условиям а a(t) а; ( / ..., п) d: €d(t) id| (, ..., k) JoJ где a. 5 d- - известные константы. Задача управления состоит в обес печении заданной точности регулирования, т.е. в сведении ошибки регулирования где x(t)y(t)-y(t) , y(t) - задающее воздействие, до заданных рамеров /x(t)/i&, где fk выбранная положительная величина при произвольном начальном состоянии системы и при обеспечении малой зависимости динамических свойств управляемых процессов от параметров объекта, изменяющихся в заданных пределах, и от воздействия внешних сил. Наиболее близкой к предлагаемой является бинарная система управления вынужденным движением с .координатно-параметрической обратной связью l, содержащая последовательно соединенные первый сумматор, блок у ножения, вторым входом подключенный к выходу инерционного фильтра, объект управления, блок сравнения, второй вход которого соединен с .выходом задатчика, а выход - с входами дифференциаторов, выходы котор и выход блока сравнения через соответствующие последовательно соединенные модульные элементы и первые усилители соединены с входом первого сзгмматоЕ)а, а через соответствующие вторые усилители - с входом второго сумматора, выход которого соединен через последовательно включенный релейный элемент с входом инерционного фильтра, второй вход которого подключен к выходу третьего сумматора, датчики внешних возмущений, выходы которых подключены к входу первого сумматора, через соответствующие четвертые усилители соединены с входом третьего сумматора. Недостатком известной системы автоматического управления является наличие высокочастотных колебаний сигнала управления, что не обеспечивает достаточной надежн ости к качестварегулирования. Цель изобретения - улучшение качества регулирования и повышение надежности системы путем повьш1ения плавности сигнала управления при действии измеряемых помех по нестационарным каналам. Поставленная цель достигается тем, что система, содержащая последовательно соединенные инерционный фильтр, первый блок умножения, объект управления и блок сравнения, вторым входом подключенным к выходу задатчика, а выходом - к входам дифференциаторов, соединенных как и вькод блока сравнения через соответствзпющие последовательно соединенные первые модульные элементы и первые усилители с входом первог о сумматора, а через соответствующие вторые усилители - с входом второго сумматора, выход которого через релейный элемент соединен с первым входом инерционного фильтра, причем датчики в етних возмущений через соответствующие вторые модульные элементы соединены с входами соответствующих третьих и четвертых усилителей, а выходы четверть1х усилителей через третий сумматор соединены с вторым входом инерционного фильтра, содержит четвертый сумматор и последовательно соединенные второй блок умножения и пятый усилитель, выходом подключенный к входу второго сумматора, первый вход второго блока умножения соединен с первым входом первого блока умножения, а второй вход - с выходами первого сумматора и третьих усилителей и через четвертый сумматор с вторым входом первого блока умножения.
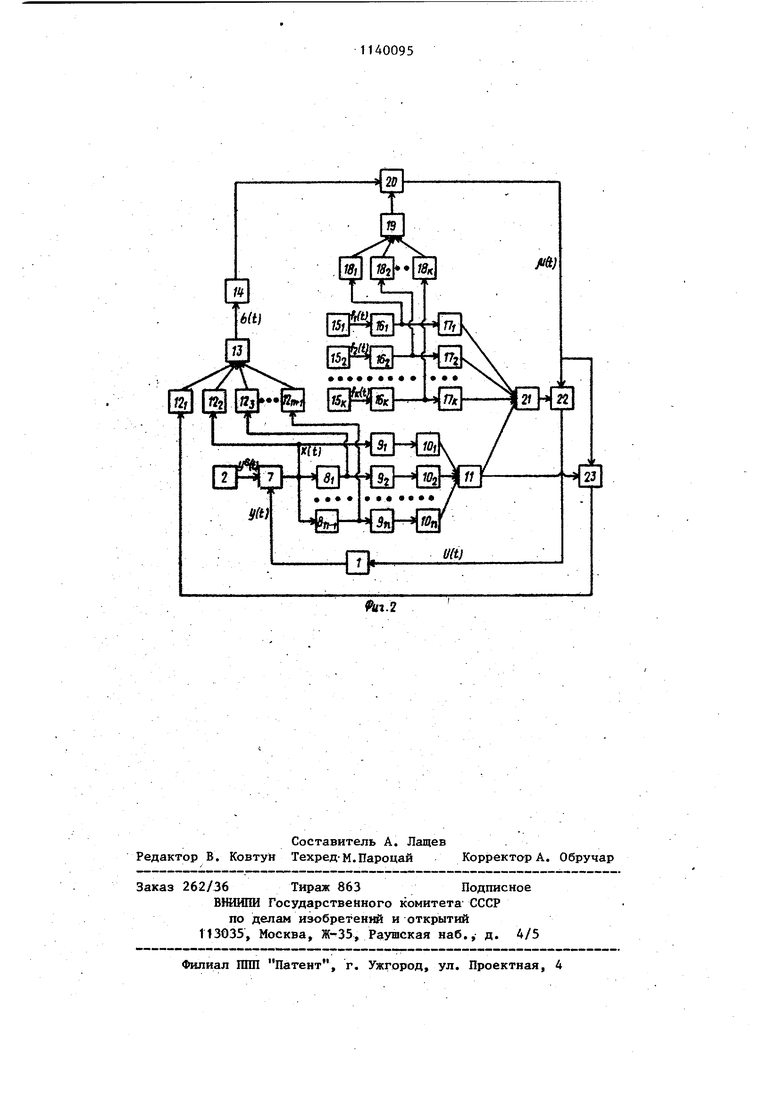
На фиг. 1 и 2 представлены схемы предлагаемой бинарной системы.
Hai схеме представлены объект управления 1, задатчик 2, вырабатьгаающий сигнал yS(t)const, регулятор 3 контура координатной обратной связи (КОС), вырабатьшающий сигнал управления и();), задатчик 4 контура координатно-параметрической обратной связи с выходным сигналом x(t), регулятор 5 контура, формирующий сигнал /ZJ(t), регулятор 6 контура параметрической обратной связи, формирующий сигнал c(t), блок сравнения 7, дифференциаторы 8it-.. .8;, , первые модульные элементы 9 , ... 9, первые усилители 10,-10у, первый сумматор 11, вторые усилители ,, второй сумматор 13, релейньм элемент 14, датчики возмущений , вторые модульные элементы 16 j- 16 , третьи усилители 1 7- - 17j,, четвертые усилители 18, третий сумматор 19, инерционный фильтр 20, четвертый сумматор 21, первый блок умножения 22; второй блок умножения 23.
Использование координатной и координатно-параметрической обратных связей приводит к структурной схеме, где регулятор 5 контура координатно параметрической обратной связи предназначен для компенсации ошибки этого контура 5(t), при этом в замкнутой системе могут возникать высокочастотные колебания сигнала управления U(t). Природа этих колебаний заключена в том, что динамические характеристики задатчика 4 фиксированы, а динамика системы в процессе функционирования меняется значительно, В связи с этим предлагается ввести р систему контур параметрической обратной связи, которьш устанавливает соответствующую зависимость мезеду параметрами динамического задатчика c(t) и величиной сигнала fil(t). Один из эффектов от введения указанной обратной связи состоит в устранении высокочастотных колебаний сигнала управления U(t), С введением параметрической обратной связи структзФная схема замкнутой
системы приобретает вид представленньй на фиг. 1.
Работает предлагаемая система следующим образом.
Сигнал y5(t) с выхода задатчика сравнивается с сигналом y(t) с выхода объекта управления 1 в блоке сравнения 7. Полученная разность noteTynaeT непосредственно на вход первого модульного элемента 9, а на входы других первых модульных элментов 9, ..., 9 п через дифференциаторы соответствуняцих порядков 8,5, ..., 8 сигналы с выходов первых модульных элементов через соответствзтощие первые усилители 10/, ..., lOfi подаются на вход первого сумматора 11; сигнал с выхода блока сравнения и сигналы с выходов диф.ференциаторов 8, . .., 8f,.j подаются через соответствующие вторые уси лители 12jj, ... 12j, на вход второго сумматора 13, на вход которого подается через усилитель 12 сигнал с вновь введенного второго блока умножения 23. Полученная сумма, представляющая собой сигнал ошибки контура координатно-параметрической обратной связи, подается на вход релейного элемента 14, с выхода которого сигнал подается на вход инерционного фильтра 20; сигналы с выходов датчиков возмущений 15, ...,15к подаются через соответствующие . вторые модульные элементы 16, ..., 16(( и третьи усилители 7ц, ..., 17) на вход четвертого сумматора 21, а с выходов вторых модульных элементов через соответствующие четвертые усилители ISj, ..., 18|c - на вход третьего сумматора 19, выходом подключенного к второму входу, инерцион- ;ного фильтра 20, сигнал с выхода которого подается на входы первого 22 и второго 23 блоков умножения, второ вход первого блока умножения 22 при этом подключен к выходу четвертого сумматора 21, на вход которого поданы сигналы с выхода первого сумматора 11 и сигналы с выходов третьих усилителей 17, ..., 17j. С выхода первого блока умножения 22 сформированный сигнал управления U(t) поступает на объект управления 1, второй вход второго блока умножения 23 подключен к выходу первого сумматора 1 1 .
Следует отметить, что используемая в предлагаемой системе параметрическая обратная связь образована первым сумматором 11, вторым блоком умножения 23 и вторьм усилителем 12 Кроме того, предлагаемый способ введения параметрической обратной свя-зи отличается от известного тем, что он требует дополнительно только один усилитель 12л вместо применяемьгх в известном п дополнительньпс усилителей .
Технико-экономический эффект предлагаемой системы управления вынужденным движением с координатной, координатно-параметрической и пара- метрической обратными связями состоит в том, что она гарантирует более высокое качество регулирования по сравнению с известной системой за счет повышения надежности системы
путем повьшения плавности сигнала управления, что достигается путем введения в систему управления вынужденным движением с координатной обратной связью и координатно- параметрической обратной связью параметрической обратной связи, обеспечивающей устранение высокочастотных колебаний сигнала управления Результаты натурно-математического моделирования показываютJ что использование предложенной системы для управления основностью шихты на доменной печи позволяет обеспечить годовую экономи порядка 100 тыс, руб в год на одну доменную печь. Указанный эффект достигается за рчет снижения удельного расхода кокса на 3 кг/т вьтлавляемого чугуна, повышения производительности доменной печи на 0,5% и снижения колебаний содержания Si в вьшлавляемом чугуне на 0,005%,
| название | год | авторы | номер документа |
|---|---|---|---|
| Бинарная система управления вынужденным движением | 1983 |
|
SU1117587A1 |
| Бинарная система управления | 1983 |
|
SU1120284A1 |
| Бинарная система управления | 1990 |
|
SU1705802A1 |
| Бинарная система управления | 1985 |
|
SU1303993A1 |
| Бинарная система управления | 1988 |
|
SU1837254A1 |
| Бинарная система управления | 1985 |
|
SU1294798A1 |
| Бинарная система оптимальной стабилизации | 1988 |
|
SU1837255A1 |
| Система управления с координатно-параметрической обратной связью | 1983 |
|
SU1126927A1 |
| КОМБИНИРОВАННАЯ СИСТЕМА КООРДИНАТНО-ПАРАМЕТРИЧЕСКОГО УПРАВЛЕНИЯ НЕСТАЦИОНАРНЫМ ОБЪЕКТОМ | 2004 |
|
RU2279116C2 |
| СИСТЕМА АДАПТИВНОГО УПРАВЛЕНИЯ ЭЛЕКТРОДВИГАТЕЛЕМ | 2015 |
|
RU2605946C1 |
БИНАРНАЯ СИСТЕМА УПРАВЛЕНИ содержащая последовательно соединен ные инерционный фильтр, первый блок умножения, объект управления и блок сравнения, вторым входом подключенным к выходу задатчика, а выходом к входам дифференциаторов, соединен ных как и выход блока сравнения через соответствующие последовательно соединенные первые модульные элемен ты и первые усилители с входом первого сумматора, а через соответстx ltf « ( вующие вторые усилители - с входом второго сумматора, выход которого через релейный элемент соед1шен с первым входом инерционного фильтра, причем датчики внешних возмущений через соответствующие вторые нодульные элементы соединены с входами соответствзтощих третьих и четвертых усилителей, а выходы четвертых усилителей через третий сумматор соединены с вторым входом инерционного фильтра, отличающаяся тем, что, с целью повышения надежности и улучшения качества управле-г ния системы, она содержит четвертый сумматор и последовательно соединенные второй блок умножения и пятый усилитель, выходом подключенный к входу второго сумматора, первый вход второго блока умножения соединен с первым входом первого блока умножения, а второй вход - с выходами первого сумматора и третьих усилителей и через чetвepтый сумматор - с вторым входом первого блока умножения.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство ССС по заявке № 3667901/24, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
