Изобретение относится к автоматике и вычислительной технике и может быть использовано при изготовлении программ для станков с программным управлением.
Известна следящая система с электроразрядным копировальным прибором для двухкоординатных копировальных систем с приводами непрерывного регулирования, содержащая эле троразрядный датчик, наконечник которого разделен изолирующим промежутком на две половины, каждая из которых является самостоятельным датчиком, выдающим сигналы через анализатор на серводвигатель, наворачивающий синусно-косинусный распределитель, жестко связанный с наконечником датчика, до получения равных сигналов от его обеих половин 1.
К недостаткам этой системы следует отнести ее сложность и низкую точность, обусловленную наличием подвижных узлов в канале слежения.
Известна следящая система, в которой применен электроразрядный датчик, связанный электрически через блок управления с приводом, у которого кинематическая цепь
перемещения датчика вдоль линий чертежа, прорезанных до металлического основания, соединена также с блоком записи на программоноситель 2.
Наиболее близким к предлагаемому является следящая система с электроразрядным копировальным, прибором, в цепи регулирования работы исполнительных двигателей применен электромащинный усилитель, на который подается напряжение с электронного усилителя 3.
Общим недостатком данных систем является ограничение их применения, так как с помощью одного электрода невозможен автоматический обход замкнутых контуров и поверхностей, имеющих Острые обратные углы.
Цель изобретения - повыщение надежности и расщирение функциональных возможностей системы.
Указанная цель достигается тем, что в следящую систему для станков с программным управлением, содержащую копировальный прибор и в каждом канале управления последовательно соединенные блок измерения, блок управления и привод, введены первый генератор импульсов, последовательно соединенные коммутатор и второй генератор импульсов и в каждый канал управления формирователь импульсов, причем вход первого генератора импульсов соединен со вторым выходом коммутатора и в каждом канале управления первый выход блока измерения подключен к первому входу формирователя импульсов и к соответствующему первому входу коммутатора, второй выход - к соответствующему второму входу , коммутатора, второй вход формирователя импульсов соединен с выходом первого генератора импульсов, третий и четвертый входы - с третьим и четвертым выходами блока измерения, второй вход блока управления подсоединен к выходу второго генератора импульсов, а третий вход - к выходу формирователя импульсов другого канала.
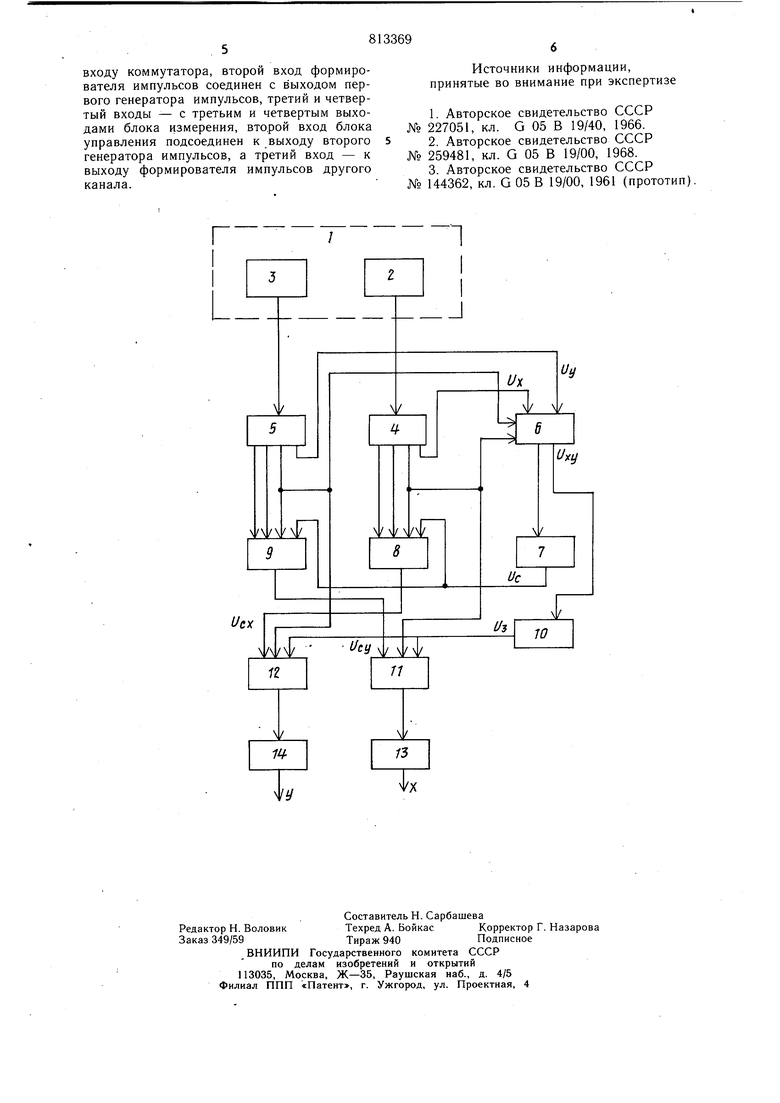
На чертеже изображена функциональная схема данной следящей системы.
Система содержит копировальный прибор 1 с электродами по координате X 2 и по координате У 3, блоки 4 и 5 измерения, коммутатор 6, первый генератор импульсов 7, формирователи импульсов 8 и 9, второй генератор импульсов 10, блоки 11. и 12 управления и приводы 13 и 14.
Устройство работает следующим образом.
Допустим, что первое перемещение осуществляется по координате «х с помощью электрода 2. В этом случае электрод 2 прибора 1 через блок 4 выдает информацию о степени приближения к поверхности детали в виде постоянного напряжения, линейно зависящего от расстояния между электродом и поверхностью детали. Это напряжение подается на-один из входов коммутатора 6, на одноименный второй вход которого из блока 4 по второму выходу подается разрещающий сигнал на формирование канала управления генераторами 7 и 10.
Генератор 7 преобразует выходное напряжение от блока измерения 4 в переменное напряжение Uc (с частотой, пропорциональной величине электроразрядного промежутка), которое подается на вход формирователей 8 и 9. Формирователь 8 формирует на выходе импульсы слежения Ucx но амплитуде, длительности и полярности на основании команд, полученных от блока 4 - по второму входу командой на разрещение слежения, по третьему и четвертому входу-командой о полярности, рассогласования и выдает их на блок 12. На формирователь 9 от блока 5 по второму входу подается сигнал на запрещение формирования импульсов слежения U. Генератор 10 преобразует выходное напряжение от блока 4 и прощедщее через коммутатор 6 в переменное напряжение UJ,KOTOрое подается на соответствующий вход блоков 11 и 12 управления, в которых на основании команд, полученных от блоков 4 и 5, формируется сигнал на управление приводами 13 и 14 по соответствующему режиму
работы. Так, для рассматриваемого случая на второй вход блока 11 подается сигнал на разрещение формирования режима задающего движения по координате «х, т. е. управление приводом 13 от электрода 2 через блок 4, коммутатор б, генератор 10, блок 11. На второй вход блока 12 подается сигнал, запрещающий режим задающего движения и тем самым, разрешающий слежение за размером по координате «у, т. е. управление приводом 14 от электрода 2 через блок 4, коммутатор б, генератор 7 и формирователь 8, блок 12. При приближении копировального прибора I ко второй стороне угла на величину возникновения электрического разряда возникает разряд между поверхностью детали и электродом 3.
Сигнал, прощедщий через блок 5 измерения и коммутатор б, передает управление процессом измерения электроду 3. Приводы 13 и 14 в этом случае управляются аналогично рассмотренному, причем управление
приводом 13 происходит от электрода 3 через блок измерения 5, коммутатор 6, генератор 7, формирователь 9, блок 11 управления в режиме слежения за размером. Управление приводом 14 - от электрода 3 через блок 5 измерения, коммутатор 6, генератор 10, блок 12 управления в режиме задающего движения, осуществляя перемещение копировального прибора 1 вдоль контура детали по координате «у, слежение за размером осуществляется по координате «х приводом 13.
Предлагаемая следящая система с многоэлектродным электроразрядным копировальным прибором заменит устройство записи программ с щаблона как более производительная и точная.
Формула изобретения
Следящая система для станков, с программным управлением, содержащая копировальный прибор и в каждом канале управления последовательно соединенные блок измерения,.блок управления и привод, огличающаяся тем, что, с целью повышения надежности и расщирения функциональных возможностей системы, в нее введены первый генератор импульсов, последовательно соединенные коммутатор и второй генератор импульсов и в каждый канал управления формирователь импульсов, причем вход первого генератора импульсов соединен со вторым выходом коммутатора и в каждом канале управления первый выход
блока измерения подключен к первому входу формирователя импульсов и к соответствующему первому входу коммутатора, второй выход - к соответствующему второму
входу коммутатора, второй вход формирователя импульсов соединен с выходом первого генератора импульсов, третий и четвертый входы - с третьим и четвертым выходами блока измерения, второй вход блока управления подсоединен к выходу второго генератора импульсов, а третий вход - к выходу формирователя импульсов другого канала.
Г
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 227051, кл. G 05 В 19/40, 1966.
2.Авторское свидетельство СССР 259481, кл. G 05 В 19/00, 1968.
3.Авторское свидетельство СССР
144362, кл. G 05 В 19/00, 1961 (прототип).
uy
Т
| название | год | авторы | номер документа |
|---|---|---|---|
| Копировальное следящее устройство для управления станком | 1982 |
|
SU1104470A1 |
| Копировальное следящее устройство для управления станком | 1987 |
|
SU1411705A2 |
| Формирователь управляющих сигналов для копировальных станков | 1982 |
|
SU1069975A1 |
| Копировальное следящее устройство для станков с программным управлением | 1982 |
|
SU1070508A1 |
| Телевизионное следящее устройство | 1979 |
|
SU902322A2 |
| Бесконтактный измерительный прибор | 1985 |
|
SU1268374A1 |
| Устройство для моделирования автоматических следящих систем с телевизионным датчиком | 1979 |
|
SU860093A1 |
| Телевизионный координатор | 1983 |
|
SU1109956A1 |
| ОПТИКО-ЭЛЕКТРОННАЯ СИСТЕМА СОПРОВОЖДЕНИЯ | 2000 |
|
RU2191407C2 |
| Копировальное следящее устройство для станков с программным управлением | 1981 |
|
SU960732A1 |
