1
Изобретение относится к области автоматизации управления перемещением рабочих органов автоматических устройств и предназначено для использования в цифровых системах программного управления.
Известны линейные интерполяторы, содержащие логический блок выдачи командных импульсов, регистр, счетчик, выход которого соединен с входами регистра и логического блока, а выходы регистра и блока сопровождения динамического регистра соединены с соответствующими входами счетчика и логического блока .
Погрешностью этих устройств является низкое быстродействие, и большое количество оборудования, необходимое для управления исполнительными механизмами.
Наиболее близким техническим решением к изобретению является линейный интерполятор, содержащий генератор импульсов, первый счетчик, делитель частоты, блок коммутации, второй счетчик, блок управления, блок считывания программы, счетчик повторения кадра 2.
Целью изобретения является повышение быстродействия.
Достигается это тем, что линейный интерполятор, содержащий блок вычисления исходных данных, соединенный первым выходом через регистр с входом первого дешифратора, а вторым выходом - с первым входом счетчика, второй дешифратор, входом соединенный с выходом счетчика, а выходом - с первым входом первого элемента И, второй вход которого соединен с выходом генератора импульсов , а выход - с вторым входом счетчика, первым входом коммутатора и входом первого триггера, выходом соединенного с вторым и третьим
входами коммутатора, дополнительно содержит блок вторых элементов И и для каждой координаты второй триггер, элемент ИЛИ и два третьих элемента И, первые входы которых подключены к выходу
элемента ИЛИ, а вторые входы - к первому и второму выходам второго триггера соответственно, первый и второй входы которого соединены с третьими входами блока вычисления исходных данных, первые входы блока вторых элементов И соединены с первым входом коммутатора, вторые входы - с соответствующими выходами первого дешифратора, а выходы - с соответствующими входами элементов ИЛИ
для каждой координаты.
Анализ чертежей обрабатываемых деталей показывает, что около 90% формообразных элементов представляют собой отрезки прямых, расположенные под углом
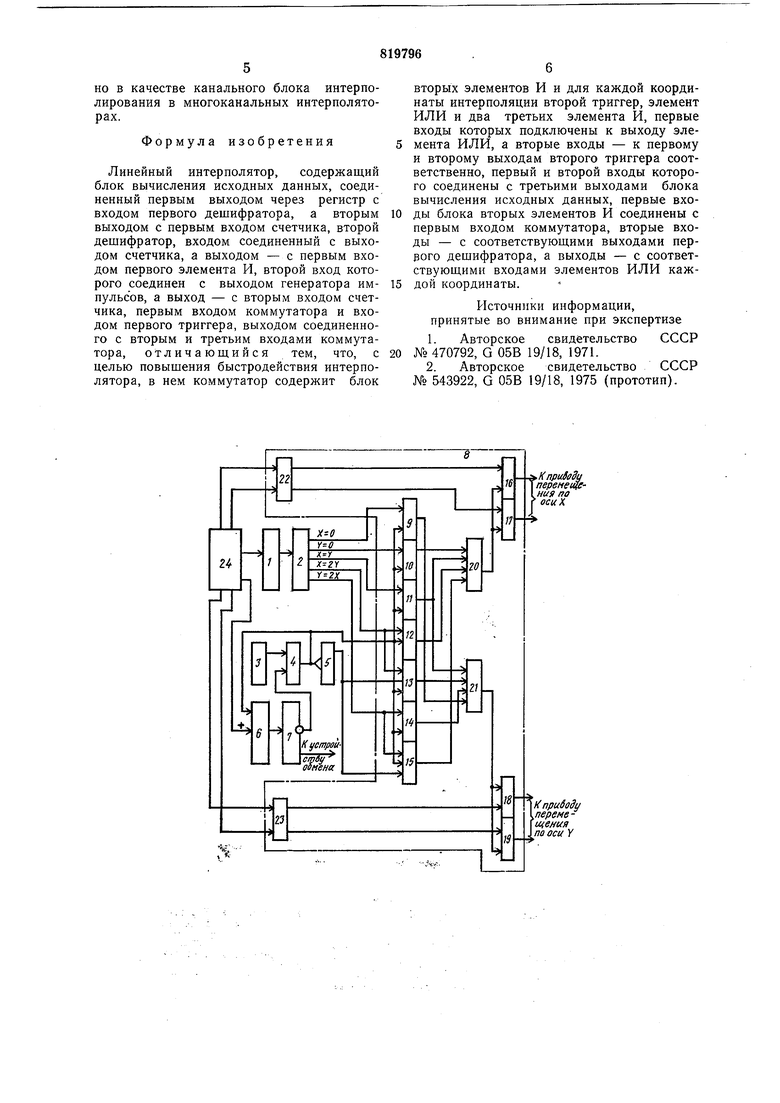
0°, 30°, 45°, 60°, 90° к осям координат. Использование алгоритма интерполяции отрезков фиксированных направлений позволяет повысить производительность и быстродействие интерполятора, а также существенно сократить количество оборудования, необходимого для его реализации. Предлагаемое устройство реализует интерполирование отрезков, имеющих строго фиксированные направления: по оси У (0); по оси X (); под углом 45° (Х F); под углом 30° (); под углом 60° (). На чертеже приведена блок-схема линейного интерполятора. Устройство состоит из регистра 1 управляющего слова, дешифратора 2 режимов работы, генератора 3 импульсов, первого элемента И 4, первого триггера 5 деления частоты, счетчика 6 количества исполнительных импульсов ведущей координаты, второго дешифратора 7, коммутатора 8, который состоит из блока вторых элементов И 9, 10, 11, 12, 13, 14, 15, третьи элементы И 16, 17, 18, 19 и элементы ИЛИ 20, 21, а также триггера 22 направления перемещения по оси абсцисс, триггера 23 направления перемещения по оси ординат, блока 24 вычисления исходных данных. Работа устройства осуществляется еледующим образом. С носителя входной информации координаты начала и конца интерполируемого отрезка поступают в блок 24 вычисления исходных данных. В блоке 24 осуществляется вычисление длин проекций интерполируемого отрезка на координатные оси. Сравнением этих длин проекций определяется большая из них. При этом координата, проекция которой имеет большую абсолютную величину. авляется ведущей. Другая координата является ведомой. Из блока 24 вычисления исходных данных двоичный код количества унитарных импульсов по ведущей координате поступает в счетчик- 6, информация о режиме работы поступает в регистр 1 управляющего слова, данные о направлениях перемещений рабочего органа по координатным осям - в триггеры 22, 23 направления перемещения по осям координат. После записи кода количества импульсов в счетчик 6 на выходе дешифратора 7 появляется сигнал, соответствующий нулевому состоянию, поступающий на вход элемента И 4 и разрешающий прохождение исполнительных импульсов от генератора 3. Сигналы с выхода элемента И 4 поступают на счетный вход вычитания счетчика 6, в коммутатор унитарных импульсов на входы элементов И 9- 14, а также на счетный вход триггера 5. Сигналы с едини.лого выхода триггера 5, частота следования которых в 2 раза меньше частоты генератора 3, поступают на входы элементов И 13, 15 соответствующих режимам работы Х-2У и . Импульсы, поступающие в блок 8 с выхода элемента И 4, соответствуют унитарным кодам перемещений по ведущей координате. При 0 открывается элемент И 9, обеспечивая поступление импульсов от генератора 3 через элемент ИЛИ 21 на входы элементов И 18 и 19. В зависимости от состояния триггера 23 знака «У открывается соответствующий элемент И 18 или 19, и импульсы перемещений поступают на входы 4-Y или -У привода перемещений по оси У. При аналогично режиму отрабатываются перемещения по оси X, в этом случае задействуют элемент И 10, элемент ИЛИ 20, элементы И 16, 17 и триггер 22 знака «J соответственно, При через элемент И И исполнительные импульсы поступают на входы элементов ИЛИ 20 и 21, а оттуда - на входы элементов И 16-19, обеспечивая поступление импульсов перемещений по осям X и У одновременно. Направление перемещения определяется совместным состоянием триггеров Щ и 23. При обработке режимов и одновременно открываются элементы И 12 и 13 или 14 и 15 перемещений по осям X и У соответственно. При наличии на входах элементов И 13 и 15 соответствующего сигнала с единичного выхода триггера 4 через элементы И 12 и 13 (для .2У) или через элементы И 14 и 15 (для ) поступают через элементы ИЛИ 20 и 21 на входы элементов И 16-19, обеспечивая одновременно поступление импульсов перемещений по обеим координатам, Когда триггер 5 находится в нулевом состоянии, элементы И 13 и 15 закрыты и через элементы И 12 (для ) или 14 (У 2Х) обеспечивается поступление импульсов перемещений только по координате X или У соответственно. Каждый импульс с выхода элемента И 4 поступает на вход (-1) счетчика 6 ведущей координаты. Когда код в счетчике 6 станет равным нулю, работа схемы прекращается. На выходе щины «О дещифратора 7 формируется сигнал, поступающий в устройство обмена и разрешающий ввод следующего кадра информации, в блок 24 вычисления исходных данных. Далее работа устройства повторяется аналогично описанному выще. Использование устройства интерполирования для фиксированных направлений позволяет существенно упростить конструкцию устройства и повысить быстродейтвие. Устройство может быть использова
| название | год | авторы | номер документа |
|---|---|---|---|
| Линейный интерполятор | 1986 |
|
SU1383302A1 |
| Линейный интерполятор | 1989 |
|
SU1674064A1 |
| Линейный интерполятор | 1988 |
|
SU1522157A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1615744A2 |
| Линейный интерполятор | 1989 |
|
SU1686408A1 |
| Устройство для программного управления группой станков | 1970 |
|
SU871745A3 |
| Интерполятор | 1983 |
|
SU1089551A1 |
| Цифровой линейный интерполятор | 1989 |
|
SU1693592A1 |
| Цифровой линейный интерполятор | 1991 |
|
SU1807450A1 |
| Интерполятор | 1983 |
|
SU1108395A1 |
