1
Изобретение относится к области вычислительных средств управления и может быть использовано в системах числового программного управления (ЧПУ) станками.
По основному авт.св. 732816 известно устройство для коррекции .эквйдистанты , предназначенного преимущественно для использования в ЧПУ технологическим оборудованием. Это устройство содержит формирователь знака, переключатель знака, логический блок и в каждом координатном канале управлениями - последовательно соединенные регистр коррекции, преобразователь кода, делитель и вычислительный блок, вторые входы которого подключены к выходам логического блока, третий и; четвертый входы которого подключены к командному и синхронизирующему входам устройства, а выход - к выходу устройства. Корректирующие импульсы, поступающие с выхода делителя (с переменным коэффициентом деления) на первый вход вычислительного блока синхронизируются четными номерг О тактовых импульсов, частоты повторения которых в два раза вьиие частоты координатных импульсов, и в режиме
сложения вписываются в середину меж,цу смежными координатньами импульсами, синхронизированными нечетными номерами тактовых импульсов. В режиме вычитания каждый корректирующий импульс запрещает прохождение на выход устройства коррекции последующего координатного импульса. Режим сложения или вычитания задается
вычислительному блоку логическим блоком 1,
Это устройство обеспечивает равномерноз вписывание корректирующих импульсов между координатными, снижает, по сравнению с известными устройствами, уровни перепадов скорости подачи исполнительных органов программного оборудования, но не полностью их компенсирует.
Цель изобретения - повышение точности устройства путем обеспечения постоянства частоты следования результирующих выходных импульсов устройства.
. Поставленная цель достигается тем, что устройство дпя коррекции эквйдистанты в каждый координатный канал управления введены элементы И и ИЛИ и дополнительный делитель, а
четвертый вход вычислительного блока
ка.ждого координатного канала управления подключен.) к выходу элемента ИЛИ данного канала, первый вход первого элемента И подключен к синхронизирующему входу устройства и ко входу дополнительного делителя, второй вход - к первому выходу второго элемента Ник выходу логического блока, а выход - к первому входу элемента ИЛИ, соединенного вторым входом с выходом второго элемента И, первый вход которого подключен к выходу дополнительного делителя, а второй вход - к второму выходу логического блока.
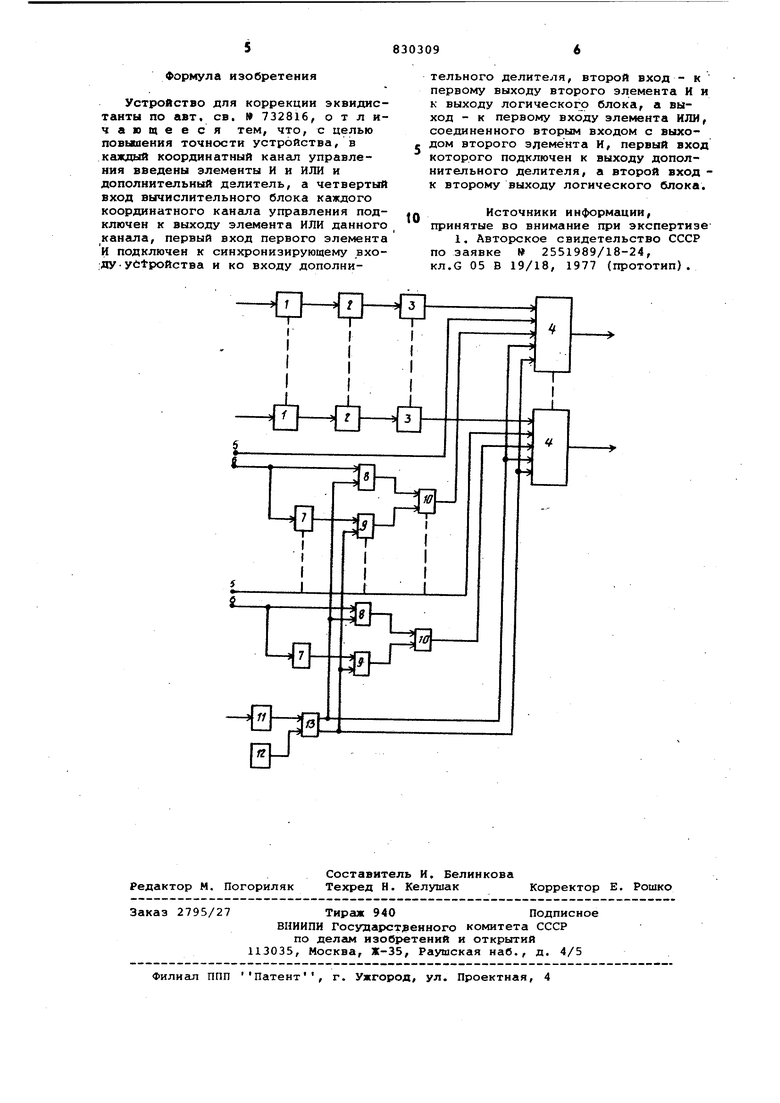
На чертеже представлена блок-схема устройства.
Устройство содержит в каждом координатном канале управления регистры 1 коррекции, преобразователь 2 кода, делитель 3, вычис/1ительный блок 4, командные 5 и синхронизирующие 6 входы устройства, дополнительный делитель 7, первый 8 и второй 9 элементы И, элемент ИЛИ 10, а также формирователь 11 знака, переключатель 12 знака и логический блок 13.
Устройство работает следующим образом.
Предварительно рассчитанные числ импульсов коррекции для соответствующих координат, записанные в кадр nporpaMNtta на перфоленте словами или байтами (в зависимости от требуемой максимальной величины коррекции) считываются с помощью блока ввода (на чертеже не показан) и по входны каналам коррекции устройства заносяся в регистры 1. Кадр, несущий информацию о корректирующем перемещении, содержит также код знака кривизны обрабатываемого участка эквидистанты, который с дополнительного выхода блока ввода через формирователь 11 поступает на первы вход блока 13. Знак кривизны определяется и кодируется в процессе. подготовки управляющей программы, необходимый знак коррекции устанавливается оператором перед началом работы с помощью переключателя 12, соединенного со вторым входом блока 13. В зависимости от сочетания входных сигналов блок 13 выдает сигнал управления по одному из выходных каналов и подготавливает блок 4 к выполнению, операции сложения или вычитания, а один из элементов И 8 или 9 - к выполнению операции конъюнкции.
При отработке введенного кадра числа, занесенные в регистры 1 передаются в преобразователи 2, где преобразуются в соответствующее количество корректирующих импульсов, которые через делители 3, обеспечивающие с помощью переключателей, входящих в их состав, возмож.ность выборки необходимого количества импульсов, подаются на первые входы блоков 4. Одновременно с выходов блоков координат интерполятора по входам 5 на вторые входы блоков 4 поступают командные импульсы соот, ветствующих корректируемых координат, а по входам 6 на вход делителей 7 и на .входы элементов И 8 поступают синхронизирующие (тактовые) импульсы, частота следования которых в два раза выне частоты командных импульсов соответствуницей координаты. С выхода делителя 7 синхроимпульсы с частотой, равной половинной частоте командных импульсов, подаются на первый вход элементов 5 И 9.
Если управляющий сигнал сформировался на первом выходе блока 13, то блок 4 подготовится к выполнению 0 операции вычитания, Одновременно на его вход через элементы И 8 и ИЛИ 10 поступают синхроимпульсы удвоенной частоты. При формировании управляющего сигнала на выходе
блока 13 блок 4 готовится к выполнению операции сложения, а на его вход поступают синхроимпульсы половинной частоты через элементы И 9 и ИЛИ 10. В каждом блоке 4 командные и корректирующие импульсы синхронизируются соответственно нечетными и четными номерами синхроимпульсов. Это позволяет блоку 4 равномерно вписывать каждый корректирующий импульс в середину между смежными командными
5 импульсами данной координаты в режиме сложения или стереть каждым корректирующим импульсом очередной командный импульс в режиме вычитания. В связи с тем, что командные и корректирующие импульсы в режиме вычитания синхронизированы импульсами удвоенной частоты, а в режиме сложения - импульсами половинной частоты, обеспечивается равномерность
f результирующих выходных импульсов устройства коррекции,
Предлагаемое устройство, в отличие от известного, обеспечивает постоQ янство скорости подачи режущего инструмента при вводе и выводе корректирукицей информации, позволяет корректировать траекторию режущего инструмента, находящегося в контакт-а с обрабатываемь9« материалом, повышает точность и производительность обработки, так как отсутствуют динамические перепады скорости и не требуется уменыаение прогргилмируемой подачи перед вводом и выводом коррек0 цин, упрощает процесс программирования, обеспечивает возможность локального изменения величины вектора коррекции с пульта в процессе обработки детали с целью компенсации динамических погрешностей СПИД.
Формула изобретения
Устройство для коррекции эквидистанты по авт, св. 732816, отличающееся тем, что, с целью повышения точности устройства, в каждый координатный канал управления введены элементы И и ИЛИ и дополнительный далитель, а четвертый вход вычислительного блока каждого координатного канала управления подключен к выходу элемента ИЛИ данного кангша, первый вход первого элемента и подключен к синхронизирующему входу . yйtpoйcтвa и ко входу дополни-ЧП-Ч1Н11
тельного делителя, второй вход - к первому выходу второго элемента И и к выходу логического блока, а выход - к первому входу элемента ИЛИ, соединенного вторым входом с выходом второго элемента И, первый вход которого подключен к выходу дополнительного делителя, а второй вход к второму выходу логического блока.
Источники информации, принятые во внимание при экспертизе
1, Авторское свидетельство СССР по заявке 2551989/18-24, кл.С 05 В 19/18, 1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для коррекции эквидистанты | 1977 |
|
SU732816A1 |
| Устройство для числового программного управления станками | 1985 |
|
SU1291928A1 |
| Система для программного управления | 1984 |
|
SU1246053A1 |
| Устройство для программного управления | 1985 |
|
SU1280571A1 |
| Устройство для считывания графическойиНфОРМАции | 1979 |
|
SU824240A1 |
| Устройство для считывания графической информации | 1987 |
|
SU1564661A1 |
| Способ сварки и устройство для его осуществления | 1987 |
|
SU1493408A1 |
| Устройство синхронизации | 1988 |
|
SU1644398A1 |
| Устройство для двухкоординатного программного управления | 1979 |
|
SU860007A1 |
| Устройство для считывания графической информации | 1978 |
|
SU744660A1 |
