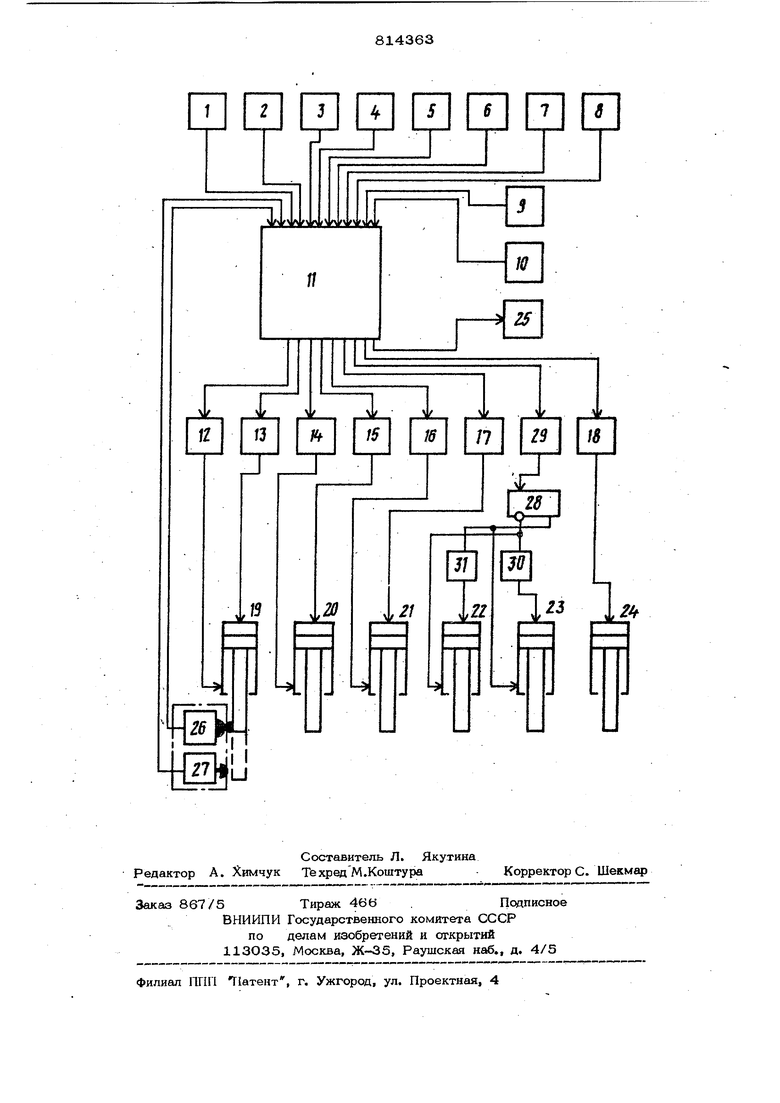
Изобретение относится к системам программного управления движущимся объек том и может быть использовано преимущест венно для транспортировки и приведения в действие пожаротушащих средств в зоне подземного пожара. Известно устройство управления самоходным пожаротушащим комплексом, содержащее блок программного управлени ко входам которого подключены датчики встречи с препятствием ,при движении к очагу пожара и к месту , датчики температуры, давления, пройденного пути, скорости движения, скорости вра- щения маховика, пусковое устройство. Нули дистанционного управления и пульт задания программ, а к выходам бло ка программного управления подключены через усилители пневмоприводы муфты реверса, передних и задних пе сочниц, пневмоприводы установки пожа , ротушения, фрикпиона скорости и тор моза Г1. Недостатки данного устройства ухфавления связаны, прежде всего, с ухфавлением движения комплекса,. Применение отдельных цепей управления приво,дами TC JMoea и фрикциона скорости может 1Ц)ивести к аварийной ситуации при остановке или начале движения комплекса в случае отказа одной из цепей управления. Кроме того, в устройстве не предусмотрены контроль и вьщача команды логической схеме управления при окончании перевода муфты реверса в то или иное положение с последующей автоматической подачей сигнала на приводы отключения тормоза и включения фрикциона скорости. В устройстве отсутствует информационный блок, позволяющий при возвращении комплекса из зоны пожара осуществлять контроль программ включения комплекса в этой зоне. Поскольку схема программного управления построена на элементах релейной электро автоматики, она имеет низкую надежность работы в экстремальных условиях эксплу381атации (высок 1я температура, повышенная запыленность и влажность, взрывоопасная среда). Цель изобретения - повышение надежности и безопасности устройства управления самоходным пожаротушащим комплексом. Указанная цель достигается теМз что устройство имеет подключенные ко входам блока Программного управления датчики положения муфты реверса и подключенные к выходам блока программно1ч управления блок контроля программ и пневмораспределитель с дополнительным усилителем и двумя регул1фуемыми дрЬсселями, при этом вход пневмораспределителя соединен с выходом блока программного управления через дополнительный усилите . Инверсный выход пневмораспределителя соединен со штоковой полостью пневмопривода фрикциона скорости и через один из регулируемых дросселей - с поршневой полостью пневмопривода тормоза, а- прямой выход пневмораспределителя соединен со штоковой полостью пневмопривода тормоза и через другой регул фуемый г; дроссель - с поршневой полостью фрикциона скорости, На чертеже представлена блок-схема устройства управления самоходным пожаротушашим комплексом. Устройство управления содержит датч 1 встречи с препятствием при двшкении комплекса к пожара, датчик 2 встречи с препятствием при движении комплекса к месту старта, датчик 3 темп ратуры, выполненный в виде струйного измерителя температуры, датчик 4 тройденного пути, датчик 5 скорости движени комплекса, датчик 6 давления питания системы управления, датчик 7 скорости вращения маховика, пусковое устройство 8, пульт 9 дистанционного управления, состоящий, например, из пневмо- кнопок Движе ше вперед, Стоп, Дви жение назад, пульт 1О задания програм блок 11 программного управления, выполненный,-например, на логических эле ментах струйной техники, соответствующие входы которого соединены с выходами блоков l-l6, пневмсусилители 12 . 18, входы которых соединены с соответ ствующими выходами блока 11 управления, пневмопривод- 19, муфты реверса, штоковая и поршневая полости которого соединены соответственно с выходами дневмоусилителей 12 и 13, пневмоприво ды 2О и 21 передних и задних песочниц штоковые и поршневые полости которых оединены соответственно с выходами невмоусилителей 14-17, пневмопривод 2 установки пожаротушения, поршневая полость которого соединена с выходом невмоусилителя 18, пневмоприводы 23 и 24 фрикциона скорости и тормоза, блок 25 контроля программ, соединенный с соответствующими выходами блока 11 программного управления и предназначенный для получения информации о программе включения пожаротушашей установки. стройство содержит также датчики 26, 27 положения муфты реверса, каждый из которых соединен с соответствующими входами блока 11 программного управления, пневмораспределитель 28 с односторонним управлением , вход которого соединен через пневмоусилитель 29с одним из выходов блока 11 программного управления, причем его инверсный выход соединен со штоковой полостью пневмопривода 23 фрикциона скорости, а прямой выход - со штоковой полостью пневмопривода 24 тормоза, регулируемые дроссели 30, 31 с обратными клапанами. Вход первого дросселя 30соединен с инверсным выходом пневмораспределителя 28, а его выход - с поршневой полостью пневмопривода тормоза 24. Вход второго дросселя 31 соединен с прямым выходом пневмораспределителя 28, а его выход - с цоршневой полостью пневмопривода 23 фрикциона скорости. Устройство работает следующим образом. В исходном состоянии самоходный комплекс находится в состоянии покоя, давление питания поступает во все блоки и узлы устройства управления, тфи этом силовое, давление поступает ; с инверсного выхода хщевмораспределителя 28 в штоковую полость привода 23 фрикциона скорости и через регулиpyeiv ый дроссель с обратным клапаном ЗО - в поршневую полость тормоза 24, что приводит к механическому зацеплению тормозных колодок с колесами самоходного комплекса и отключению фрикциона скорости.. Прямой выход пневмораспределителя 28 при этом соединяет штоковую полость привода 24 тормоза и через обратный клапан регулируемого дросселя 31 поршневую полость привода 2 3 фрикциона скорости с атмосферой. При воздействии на пусковое устройство 8 его выходной сигнал запоминает ся в блоке 11 программного управления и через пневмоусилитель 13 поступает в поршневую полость привода 19 муфты .реверса. После перевода муфты реверса в крайнее положение, соответствующее движению самоходного комплекса Ъперед, срабатывает один из датчиков 26, 27 положения муфты реверса, сигнал с которого разрешает прохождение сигнала с блока 11 программного управления через пневмоусилитель 29 на вход пневмораспределителя 28, что приводит к его переключению. При этом поршневая полость щзивода 24 тормоза через обрат -ный клапан регулирующего дросселя ЗО штоковая полость привода 23 фрикциона скорости через инверсный выход хшевмораспредёлителя 28 соединяется с атмосферой. Воздух под давлением с прямого выхода пневмораспределителя 28 поступает в штоковую полость хфивода 24 и с временным запаздыванием )через переменный дроссель 31 - в поршневую полость привода 23 фрикциона скорости, Это дает возможность в первую очередь растормозить колеса комплекса и плавно включить фрикцион скорости,-, после чего происходит движение комплекс Остановку самоходного комплекса можно осуществить, например, воздейству на датчик 2 :встречи с препятствием при движении к месту старта. Сигнал с датчика 2 поступает в блок 11 програм много управления, что приводит х исчез новению сигнала на выходе пневмоусилителя 29 и переключению хшевморасиределителя 28,. В результате этого происходит сое- динение прямого выхода пневмораспреде лителя 28, и, следовательно, штоковс потостипривода 24 тормоза И черезобратны клалан регулируемого дросселя 31 поршн вой полости привода 23 фрикциона скоро ти с атмосферой. Одновременно давление питания поступает через инверсный выход пневморасщ)еделителя 28 в штоковую полость привода 23 фршошона сксрости и через регулируемый дроссель ЗО в псршневую полость привода 24 тс моза. При этом, в первую очередь, отключается фрикциой скорости, а затем происходит наложение тормозных колодок на колеса самоходного комплекса, что приводит к его остановке. Дистанционное управление самоходным комплексом осуществляется с помощью .пульта 9i При нажатии кнопки Движение вперед сигнал поступает в блок 11 программного управления,в результате чего на одно «из выходов появляется сигнал, которыйчерез пневмоусилитель 13 поступает в поршневую полость привода 19 муфтыреверса. После перевода муфты реверса в крайнее положение, соответствующее движению комплекса вперед, срабатывает один из датчиков 26. 27 . положения муфты реверса сигнал от которого поступает в блок 11 программного управления и разрешает прохолщение сигнала Движение вперед к пневмоуснлителю 29. Сигнал с ш евмоусилителя 29 поступает на вход Ш1евмораспределителя 28, что приводит, в первую очередь, к быстрому снятию тормоза, а затем к плавному включению муфты фрикциона скорости. Комплекс движе- ся вперед. При нажатии кнопки Стоп пульта 9 дистанционного управления сигнал, поступающий в. блок 11 программного управления, переводит его в состояние, при котором на Входе усилителя 29 исчезает сигнал, что приводит к переключению пневмораспределителя 28. и, следовательно, к отключению фрикциона скорости тормоза. Ylpoисходит остановка комплекса. При нажатии . кнопки Движение назад пульта 9 диста щйоннога управления сигнал поступает в блок 11 програк:Ь Ного управления, где он запоминается и через пневмоусилитель 12 поступает в штоковую полость привода 19 муфты реверса. После перевода муфты реверса в дрзтое крайнее положение, соответствующее дЕИйсению ком- пяекса назад, срабатывает одш1 из датчиков 26, 27 положения муфты реверса, сигнал которого поступает в блок 11 программного управления и разрешает прохождение сигнала Движение назад к пневмоусилителю 29. Сигнал с пневмоусилителя 29 поступает на вход пневмораспределителя 28, что приводшСНЯТИЮ тормоза и включению муфты фрикциона скорости. Комплекс движется .назад. При нажатии кнопки Стоп пульта 9 сигнал поступает в блок 11 программного у1фавле1шя, переводит его в состояние, при кшхэроК на входе усилителя 29 исчезает сигнал, что приводит к пйреключеш1ю пневмораспределителя 28 и, следовательно,, к отключению фрикциона скорости к наложению тормоза. Происхоит остановка комплекса. При управлении самоходным комплеком по заданной программе на пульте Ю адания программ устанавливанэтся растояния от места старта до очага пожара от очага пожара до места остановки ри возвращении; температура, при котоой должна включиться установка пожаротушения время, в течение которого самоходный пожаротушащий комплекс продолжает движение вперед после включения пожаротушащей установки} время, в течение которого происходит полная остановка самоходного пожаротушащего комплекса.
После задания программы нажимается кнопка Пуск пускового устройства 8, сигнал от которого поступает в блок 11 программного управления, где он запоминается и через усилитель 13 поступает В(. поршневую полость пневмопривода 19 муфты реверса. После. перевода муфты реверса в крайнее положение, соответствующее движению комплекса вперед, срабатывает один из датчиков 26, 27 положения муфты реверса, сигнал i/r которого поступает в блок 11 программного управления и разрешает прохождение сигнала к пневмоусилителю 29. Сигнал с пневмоусилителя 29 поступает на вход пневмораспределителя 28, что приводит к снятию тормоза и включению фрикциона скорости . Компле движется вперед. При снижении скорости движения комплекса из-за пробуксовки колес срабатывает датчик 5 скорости, сигнал от которого поступает в блок 11 программного управления. При этом на одном из его выходов формируется сигнал, который через пневмоусилитель 15 поступает в пqpшнeвyю полость пневмопривода 20, включающего переднюю песочницу. При увеличении скорости движения комплекса до номинальной на выходе датчика 5 скорости исчезает выходной Сигнал и, следовательно, исчезает сигнал на выходе пневмоусилителя 15, в результате чего поршневая по лость привода 2О передней песочницы через пневмоусилитель 15 соединяется с атмосферой. ОцновреМенно с исчезновением сигнала на выходе датчика 5 скорости на выходе блока 11 программного управления появляется сигнал, который поступает на вход пневмоусилитля 14. Усиленный выходной сигнал пневмоусилителя 14 поступает в штоковую полость пневмопривода 20 передней песочниды, в результате чего про - исходит ее отключение.
В момент достижения комплексом заданного расстояния на выходе датчика 4 пройденного пути появляется сигнал, который поступает в блок 11 программного управления. Сигнал с.блока 11 поступает на один из выходов блока 2 контроля программы, где он задоминает|ся в одной из ячеек памяти и через пневмоусилитель 18 поступает в поршневую полость пневмопривода 22, включающего установку пож отушенля. При этом на входе пневмоусилителя 29 сигнал исчезает.
Это приводит к переключению пневмо распределителя 28, с выхода которого
воздух под давлением поступает в штоковую полость . пневмопривода 23 фрикциона скорости и через дроссель 30| - в поршневую полость пневмопривода 24 тсфмоза, что. приводит к отключению фрик,5 циона скорости, включению тормозноГт системы и остановке комплексеи
После полной остановки комплекс на выходе блока 11 программного упраг ления появляется сигнал, который чере0 пневмоусилитель 12 поступает в щтоковую полость пневмопривода 19 муфты реверса. После перевода муфты реверса в крайнее положение, соответствукмцее, движению комплекса назад, срабатывает один из
5 датчиков 26, 27 положения муфты реверса, сигнал от которого поступает в блок 11 программного управления.
Сигнал с блока 11 программного управления через пневмоусияитель 29
0 поступает на вход пневмораспределителя 28, что приводит к снятию тормоза и включению фрикциона скорости. Комплекс движется назад к месту старта.
При снижении скорости движения комплекса из-за пробуксовки колес срабатывает датчик 5 скорости, сигнал от которого поступает в блок 11 программного управления, в результате чего на его выходе формируется сигнал, который через пневмоусилитель 17 поступает в поршневую полость пневмопривода 21, включающего заднюю песочницу. При увеличении скорости движения комплекса до номинальной на выходе датчика 5 скорости исчезает выходной сигнал и, следовательно, сигнал на выходе пневмоусилителя 17, в результате чего поршневая полость пневмопривода 21 задней песочницы через пневмоусилитель 17 сообщается с атмосферой. Одновременно с исчез50 новением сигнала на выходе .датчика 5 скорости, на выходе блока 11 программного управления появляется сигнал, который поступает на вход пневмоуси.лителя 16. Усиленный вьшодной сигнал 55 пневмоусилителя 16 поступает в штоковую полость пневмопривода 21 задней песочницы, в результате чего происходит отключение задней песочницы. 9 При достижении комплексом места остановки (старта) на выходе датчика 4 пройденного пути появляетхзя сигнал, Ксзторый поступает .в блок 11 программного управления, в результате чего на входе пневмоусилиргеля 29 сигнал исчезает Это приводит к переключению пневмо|распределителя 28, с инверсного выход которого воздух под давлением поступае в штоковую полость - пневмопривода 23 фрикциона скорости и через дроссель 30 в поршневую полость пневмопривода 24 тормоза, что приводит к отключению фри циона скорости, включению тормозной системы и остановке комплекса. Если при движении в зону пожара комплекс достигает зоны заданной температуры, независимо от пройденного пути, на выходе датчика 3 температуры появляется сигнал, который поступает в блок 11 программного управления, в результате чего на одном из выходов блока 25 контроля программ появляется сигнал, который запоминается в одной из ячеек памяти. СЗЩновременно на выходе пневмоуснЛителя 18 появляется усилейный сигнал, который поступает в поршневую полость пневмопривода 22, включающего установку пожаротушения. При этом комплекс продолжает : движение, вперед в течение времени, устанавливаемого на пульте 10 задания программ. После истечения заданного времени сигнал на выходе блока 11 программного управления исчезает. Это приводит к переключению пневмораспределителя 28, с инверсного выхода которого возду под давлением поступает в штокрвую полость пневмопривода 23 фрикциона скорости и через дроссель ЗО - в Поршне вую полость пневмопривода 24 тормоза. При этом происходит отключение фрикцио скорости, включение тормозной системы и остановка комплекса. После полной остановки комплекса на выходе блока 11программного управления появляется сигнал, который через пневмоусилител 12поступает в штоковую полость пневм привода 19 муфты реверса. После перевода муфты реверса в крайнее положение, соответствующее движению комплекс назад, срабатывает один из датчиков 26 27 положения муфты реверса, сигнал от которого поступает в блок 11 . программного управления. На выходе блока 11 появляется сигнал, который через пневмоусилитель 29 поступает на вход пневмораспрбделителя 28, что 3 приводит к снятию тормоза и включению фрикциона скорости. Комплекс движется назад к месту старта. При достижении комплексом . меОта старта на выходе датчика 4 хфойденного пути появляется сигнал, который поступает в блок 11 программного отправления, в результате чего на входе пневомусилителя 29 сиг нал исчезает. Это приводит к пбреключению пневмораспределителя 28 и, следовательно, к отключению фршщионной скорости, включению тормозной системы и остановке комплекса. При встрече с препятствием при уменьшении скорости вращения маховика или при уменьшении давления сжатого воздуха в баллонах ниже допустимого, на выходе одного из датчиков 1, 6 или 7 появляется сигнал, который, поступает в блок 11 программного управления, в результате чего на одном из выходов блока 25 контроля программ появляется сигнал, ко торый запоминается в одной из ячеек памяти. Одновременно на выходе пневмоусилителя 18 появляется усиленный сигнал, который поступает в поршневую полость пневмопривода 22, включайэщего установку пожарот1аиения, а на-входе пневмоусилителя 29 сигнал исчезает. Это приводит к переключению пневмораспределителя 2В, к отключению.: фрикдиона скорости, включению тормозной системы и остановке комплекса. После полной остановки комплекса на входе блока 11 щэограммного управлешш появляется сигнал, который через пневмоусилнтель 12 поступает в штоковую полость пневмопривода 19 муфты реверса. После перевода муфты реверса в крайнее положение, соответствующее движению комплекса назад, .срабатывает один из датчиков 26, 27 поло- . жения муфты реверса, сигнал от которого поступает в блок 11 программного управления, в результате чего на его выходе появляется сигнал, который через пневмоусилитель 29 поступает на вход пневмораспределителя 28, что приводит к . снятию тормоза и включению фрикциона скорости. Комплекс движется назад к месту старта. При достижении комплексом места старта на выходе датчика 4 пройденного пути появляется сигнал, который поступает в блок 11 программного управления, .в результате . .чего на входе пневмоусилителя 29 сигнал исчезает. Это приводит к переключению пневмораспределителя 28 и, следовательно, к отключению фрикциона скорости. 8 включению тормозной системы и остановке комплекса. Применение изобретения позволяет существенно повысить надежность и .безо пасность работы самоходных пожарет ушащих кокшлексов в экстремальных условиях (высокая температура, повышенная запыленность окружающего воздуха, взрывоопасная среда), уак как в нем предусмотрены блокировкИ| нсключающие переключение муфты реверса при движущемся комплексе, включение фрикциона скорости при включенном тормозе, включение тормоза при включенном фрикционе скорости. Формула изобретения I Устройство управления самоходным пожарсггушащим комплексом, содержащее блок программного управления, ко входам которого подключены -датчики встречи с препятствием при движении к очагу пожара и к месту старта, датчики те пературы, давления, пройденного пути, ско рости движения, скорости вращения махови пусковое устройство, пульт дистандионногх управления и пульт задания програм а к выходам блока программного управ- подключены через усилители пнев моприводы муфты реверса, передних и задних -песочниц, пневмоприводы ус12ановки пожаротушения, фрикциона скорости и тормоза, отличающееся ем, что, с целью повышения надежности и безопасностИг оно имеет подключенные ко входам блока программного управления датгчики положения муфты реверса и подключевшые к выходам блока программного управления блок контроля программ и пневмораспределитель с дополнительным усилителем и двумя регулируемыми дросселями, при этом, вход пневмораспределителя соединен с выходом блока программного управления через дополнительный усилитель, инверсный выход пневмораспределителя соединен со штоковой полостью пневмопривода фрикциона . скорости и через один из регулщэуемых дросселей - с поршневой полостью пневмопривода тормоза, а прямой выход пневмораспределителя соединен со штоковой полостью пневмопривода тормоза и через другой регулируемый дроссель - с прршневой полостью фрикциона скорости. Источники информации, принятые во внимание при экспертизе 1. Тезисы докладов первой Всесоюзной научно- производственной конференции ТТредупреждение и тушение пожаров. 1-я секция Предупреждение экзогенных пожаров и автоматическая защита щахт и открытых разработок Донецк, 25-27 мая 1978 года, с. 43-44.

| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный пневматический привод с обратной пневматической связью | 2018 |
|
RU2685167C1 |
| Позиционный пневматический привод | 2018 |
|
RU2689662C1 |
| СПОСОБ ИСПЫТАНИЯ РЕЖУЩИХ УЗЛОВ ДЕРЕВООБРАБАТЫВАЮЩИХ СТАНКОВ И НАГРУЗОЧНОЕ УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1995 |
|
RU2077044C1 |
| ПНЕВМАТИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2450174C2 |
| ПНЕВМАТИЧЕСКОЕ ПРОГРАММНОЕ УСТРОЙСТВО | 2010 |
|
RU2427874C1 |
| Винтовой пресс | 1983 |
|
SU1172745A1 |
| Винтовой пресс | 1983 |
|
SU1177173A1 |
| Устройство управления штамповочным молотом (его варианты) | 1979 |
|
SU1120920A3 |
| Пневмопривод прерывистого вращательного движения | 1985 |
|
SU1307105A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ПНЕВМОПРИВОДОМ ТАЛИ | 2005 |
|
RU2309113C1 |