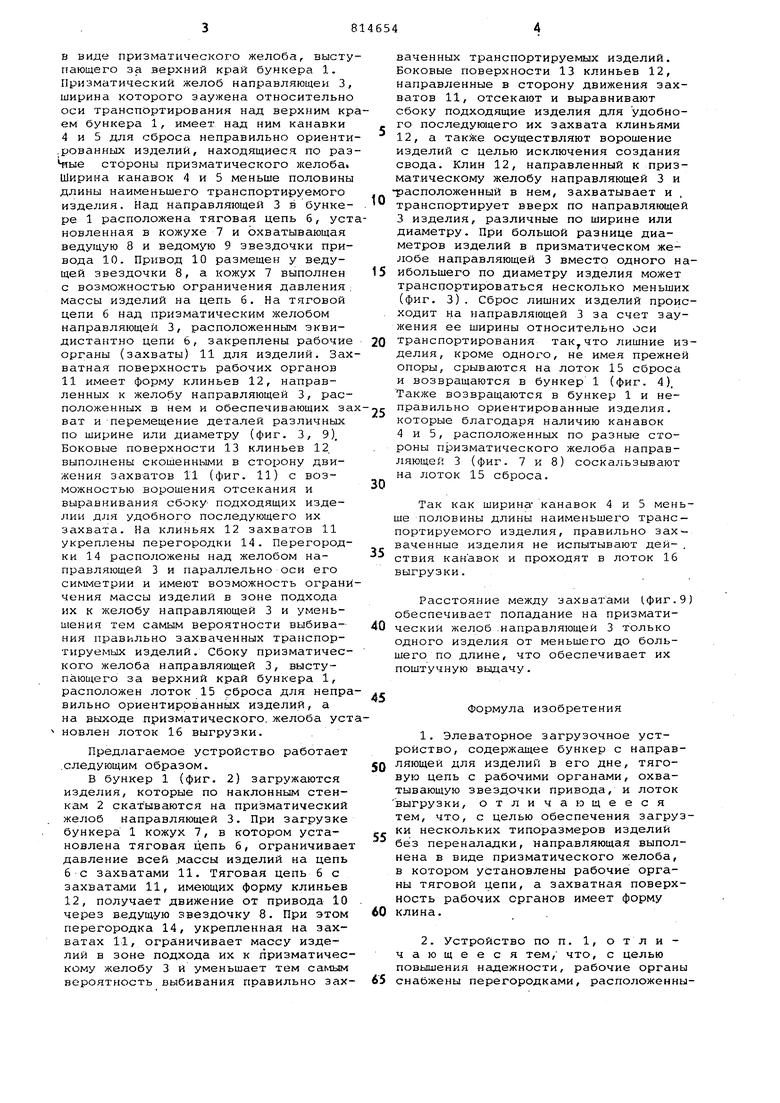
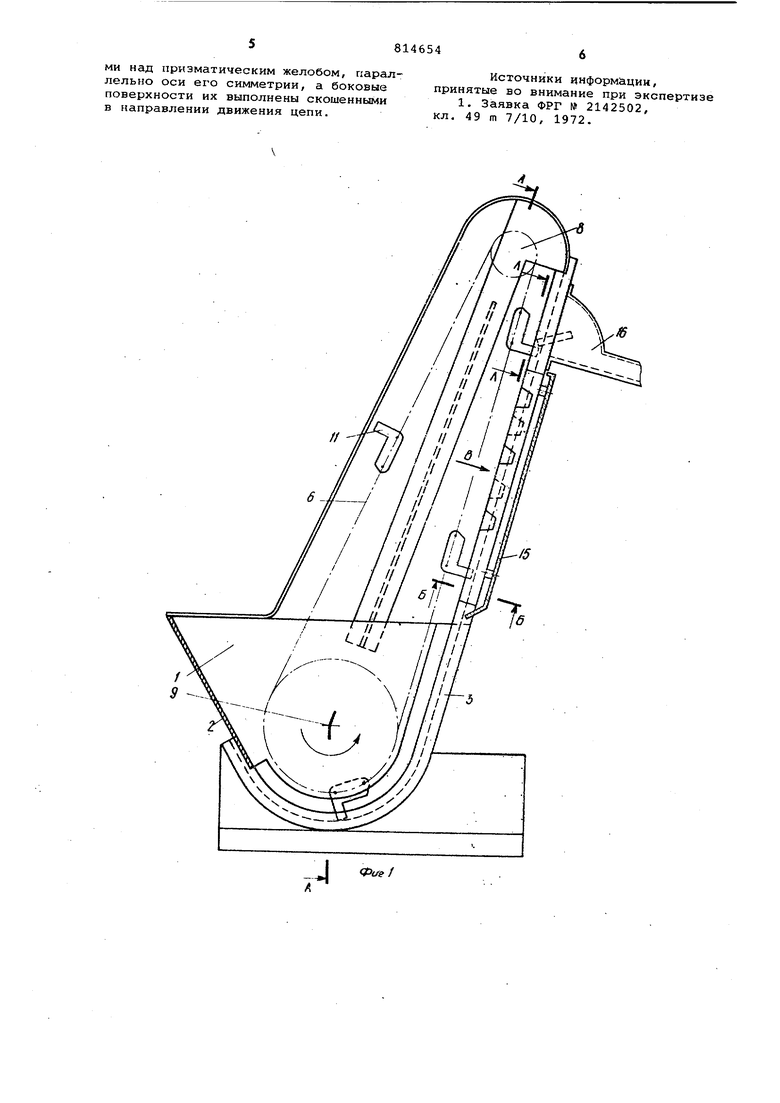
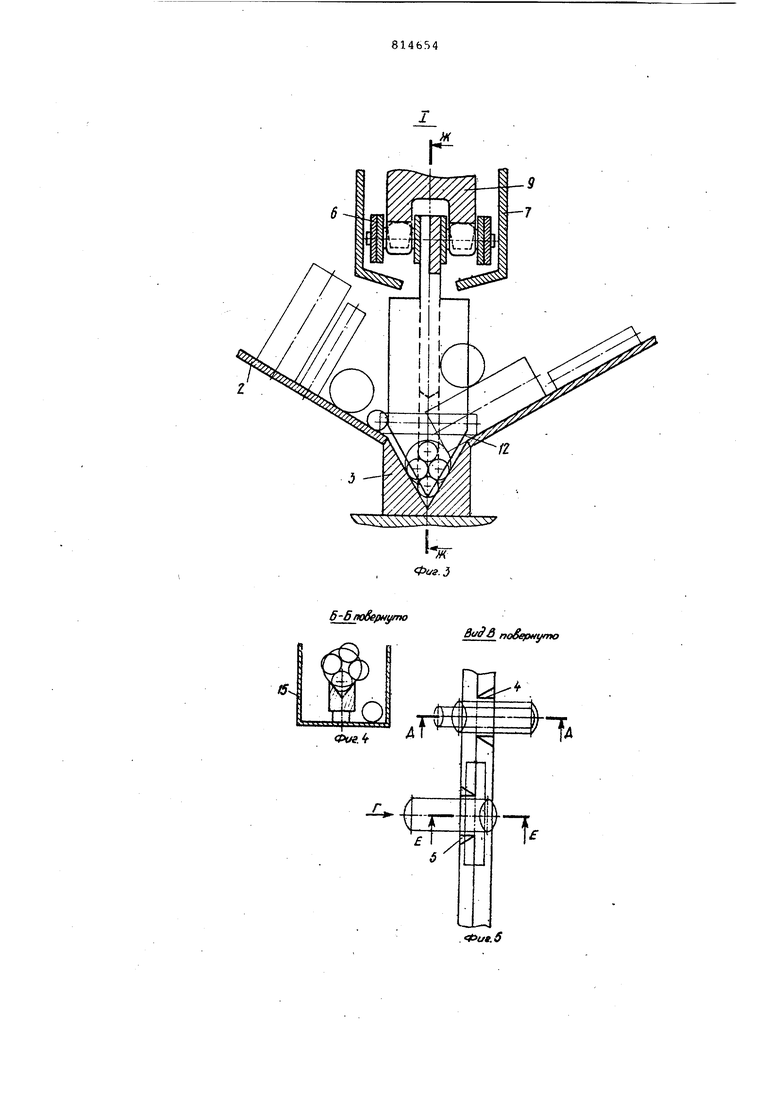
Изобретение-относится к транспорт ной технике, в частности к элеваторн загрузочным устройствам иможет быть использовано для загрузки изделий, например сверл,l втулок, штифтов и т.п. Известно элеваторное загрузочное устройство, содержащее бункер с направляющей для изделий в его дне, тяговую цепь с захватами для изделий Охватывающую звездочки привода, и ло ток выгрузки Ц . Недостатком известного устройства .является BO3f«3KHOCTb осуществления транспортировки изделий только одного типоразмера и невозможности тран спортировки изделий, ширина или диаметр которых меньше или равны ширине захватов. Это приводит к переналадке устройства при транспортировке изделий типоразмеров. Кроме того,цепь с захватами размещена под бункером и испытывает нагрузку всего столба массы изделий. Это вызывает ненадежность работы уст ройства. Цель, изобретения- обеспечение загрузки нескольких типоразмеров изделий без переналадки и повышение на дежности . Указанная цель достигается тем, что направляющая выполнена в виде призматического желоба-, в котором установлены рабочие органы тяговой цепи, а захватная поверхность рабочих органов имеет форму клина. Кроме того, с целью повышения надежности, рабочие органы снабжены перегородками, расположенными над .призматическим желобом, параллельно оси его симметрии, а боковые поверхности их выполнены скошенными в направлении движения цепи. На фиг. 1 представлено элеваторное загрузочное устройство, общий вид; на фиг. 2 - разрез А-А на фиг.1, на фиг; 3 - узел I на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. Ij на фиг. 5 - вид В на фиг. 1; на фиг. бвид Г на фиг. 5; на фиг. 7 - разрез Д-Д на фиг. 5;на фиг. 8 - разрез 5; на фиг. 9 - разрез Е-Е на фиг. З; на фиг. 10 - разрез Ж-Ж на фиг. 11- разрез 9; на фиг. И-И на фиг. 12- разрез на фиг. К-К на фиг. Л-Л на фиг. Элеваторное загрузочное устройство содержит- бункер 1 с наклонныгли стенками 2. В дне бункера 1 размещена направляющая 3, которая выполнена в виде призматического желоба, высту пающего за верхний край бункера 1. Призматический желоб направляющей 3, ширина которого заужена относительно оси транспортирования над верхним кр ем бункера 1, имеет над ним канавки 4 и 5 для сброса неправильно ориенти .рованных изделий, находящиеся по раз Цые стороны призматического желоба. Ширина канавок 4 и 5 меньше половины длины наименьшего транспортируемого изделия. Над направляющей 3 в бункере 1 расположена тяговая цепь б, уст новленная в кожухе 7 и охватывающая ведущую 8 и ведомую 9 звездочки привода 10. Привод 10 размещен у ведущей звездочки 8, а кожух 7 выполнен с возможностью ограничения давления ; массы изделий на цепь 6. На тяговой цепи б над призматическим желобом направляющей 3, расположенным эквидистантно цепи 6, закреплены рабочие органы (захваты) 11 для изделий. Зах ватная поверхность рабочих органов 11 имеет форму клиньев 12, направленных к желобу направляющей 3, расположенных в нем и обеспечивающих за ват и перемещение деталей различных по ширине или диаметру (фиг. 3, 9). Боковые поверхности 13 клиньев 12 выполнены скошенными в сторону движения захватов 11 (фиг. 11) с возможностью ворошения отсекания и выравнивания сбоку- подходящих изделии для удобного последующего их захвата. На клиньях 12 захватов 11 укреплены перегородки 14. Перегородки 14 расположены над желобом направляющей 3 и параллельно оси его симметрии и имеют возможность ограни чения массы изделий в зоне подхода их к желобу направляющей 3 и уменьшения тем самым вероятности выбивания правильно захваченных Tpasicnopтируемых изделий. Сбоку призматического желоба направляющей 3, выступающего за верхний край бункера 1, расположен лоток 15 сброса для непра вильно ориентированных изделий, а на выходе призматического, желоба уст новлен лоток 16 выгрузки. Предлагаемое устройство работает .следующим образом. В бункер 1 (фиг. 2) загружаются изделия, которые по наклонным стенкам 2 скатываются на призматический желоб направляющей 3. При загрузке бункера 1 кожух 7, в котором установлена тяговая цепь 6, ограничивает давление всей .массы изделий на цепь 6с захватами 11, Тяговая цепь 6 с захватами 11, имеющих форму клиньев 12, получает движение от привода 10 через ведущую звездочку 8. При этом перегородка 14, укрепленная на захватах 11, ограничивает массу изделий в зоне подхода их к .призматическому желобу 3 и уменьшает тем самьлм вероятность выбивания правильно захваченных транспортируемых изделий. Боковые поверхности 13 клиньев 12, направленные в сторону движения захватов 11, отсекают и выравнивают сбоку подходящие изделия для удобного последующего их захвата клиньями 12, а также осуществляют ворошение изделий с целью исключения создания свода. Клин 12, направленный к призмат.ическому желобу направляющей 3 и расположенный в нем, захватывает и транспортирует вверх по направляющей 3изделия, различные по ширине или диаметру. При большой разнице диаметров изделий в призматическом желобе направляющей 3 вместо одного наибольшего по диаметру изделия может транспортироваться несколько меньших (фиг. 3). Сброс лишних изделий происходит на направляющей 3 за счет заужения ее ширины относительно оси транспортирования так,что лишние изделия, кроме одного, не имея прежней опоры, срываются на лоток 15 сброса и возвращаются в бункер 1 (фиг. 4). Также возвращаются в бункер 1 и неправильно ориентированные изделия, которые благодаря наличию канавок 4и 5, расположенных по разные стороны призматического желоба направляющей 3 (фиг. 7 и 8) соскальзывают на лоток 15 сброса. Так как ширина- канавок 4 и 5 меньше половины длины наименьшего транспортируемого изделия, правильно захваченные изделия не испытывают дей- . ствия канавок и проходят в лоток 16 выгрузки. Расстояние между захватами (фиг.9) обеспечивает попадание на призматический желоб .направляющей 3 только одного изделия от меньшего до большего по длине, что обеспечивает их поштучную выдачу. Формула изобретения 1.Элеваторное загрузочное устройство, содержащее бункер с направляющей для изделий в его дне, тяговую цепь с рабочими органами, охватывающую звездочки привода, и лоток выгрузки, отличающееся тем, что, с целью обеспечения загрузки нескольких типоразмеров изделий без переналадки, направляющая выполнена в виде призматического желоба, в котором установлены рабочие органы тяговой цепи, а захватная поверхность рабочих органов имеет форму клина. 2.Устройство по п. 1, отличающееся тем, что, с целью повышения надежности, рабочие органы снабжены перегородками, расположенными над призматическим желобом, параллельно оси его симметрии, а боковые поверхности их выполнены скошенными в Р1аправлении движения цепи.
Источники информации, принятые во внимание при экспертизе
1. Заявка ФРГ № 2142502, кл. 49 m 7/10, 1972.
| название | год | авторы | номер документа |
|---|---|---|---|
| Элеваторное загрузочное устройство | 1983 |
|
SU1117189A2 |
| Элеваторное загрузочное устройство | 1982 |
|
SU1071390A1 |
| Транспортное устройство автоматическойлиНии для ОбРАбОТКи ТРуб | 1979 |
|
SU850355A1 |
| Бункерное загрузочное устройство для подачи заготовок типа колец | 1976 |
|
SU749623A1 |
| Элеваторное загрузочное устройство | 1986 |
|
SU1328152A1 |
| Элеваторное загрузочное устройство | 1985 |
|
SU1298155A1 |
| Загрузочное устройство | 1984 |
|
SU1171282A1 |
| Элеватор для транспортирования штучных грузов | 1980 |
|
SU905159A1 |
| Скребковый конвейер-сортировщик | 1989 |
|
SU1713861A1 |
| Механизированный бункер | 1972 |
|
SU597859A1 |

ff
6-6no6ei Hifno
Bug и noSeswymo
