| название | год | авторы | номер документа |
|---|---|---|---|
| Загрузочный ротор | 1989 |
|
SU1671441A1 |
| Элеваторное загрузочное устройство | 1979 |
|
SU814654A1 |
| Элеваторное загрузочное устройство | 1983 |
|
SU1117189A2 |
| Загрузочное устройство | 1983 |
|
SU1151418A1 |
| Роторный автомат питания | 1985 |
|
SU1250440A1 |
| Роторно-конвейерная машина с вертикальной осью для листовой штамповки | 1986 |
|
SU1428562A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Роторно-конвейерная машина | 1988 |
|
SU1574479A1 |
| Элеваторное бункерное загрузочное устройство | 1980 |
|
SU874307A1 |
| Роторный автомат питания | 1983 |
|
SU1129056A1 |
ЭЛЕВАТОРНОЕ ЗАГРУЗОЧНОЕ УСТРОЙСТВО, содержащее бункер, цепной тяговый орган с закрепленными на нем захватными органами, а также средство для выдачи изделий, о т- . личающееся тем, что, с ;целью повышения надежности вьщачи устройством изделий типа ступенчатых Всшиков, захватные органы вь полнены в виде желобов цилиндрической формы, причем плоскость, проходящая через крайние образующие рабочих поверхностей захватных органов, расположена к плоскости, проходящей через оси шарниров цепного тягового органа/ под острым углом, вершина которого обращена в сторону перемещения захватов,- при этом средство для выдачи изделий расположено с возможностью выгрузки последних вдоль их оси.
00
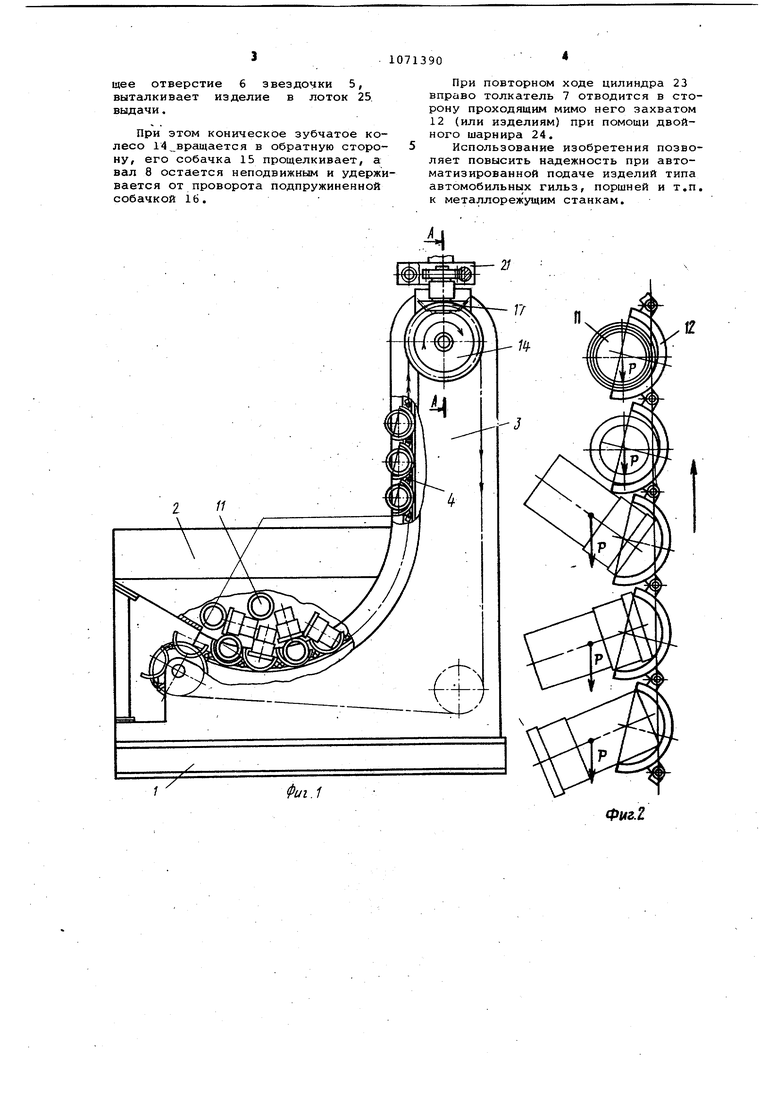
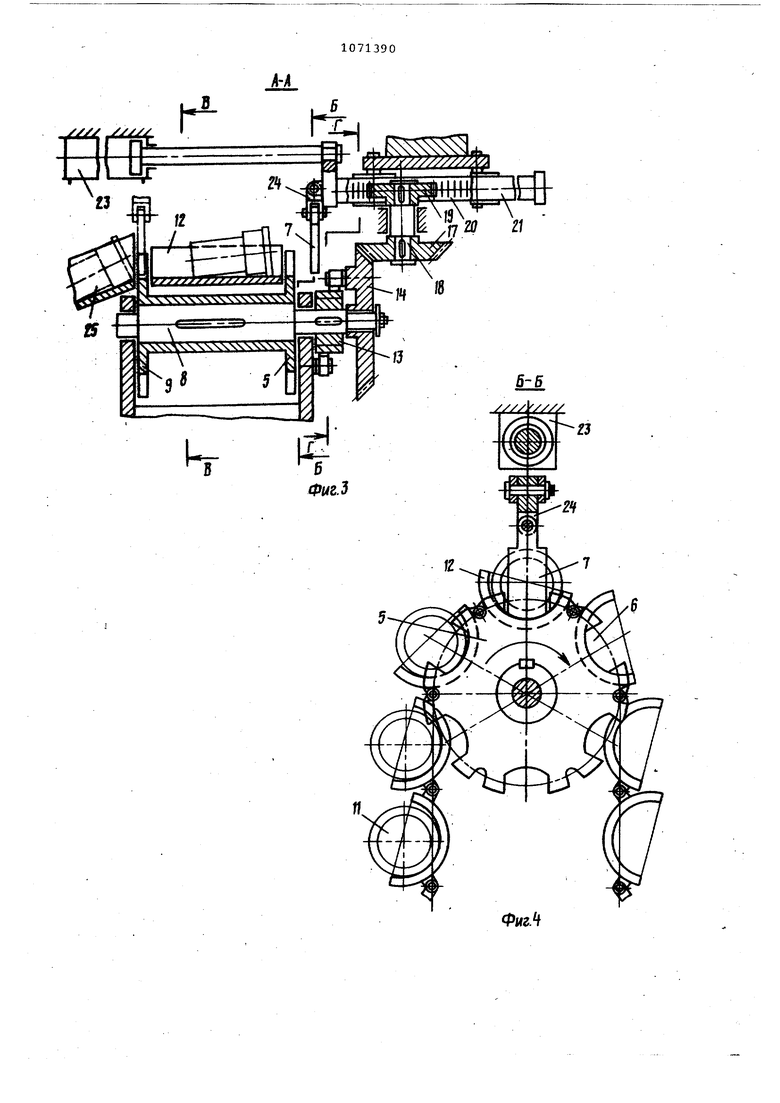
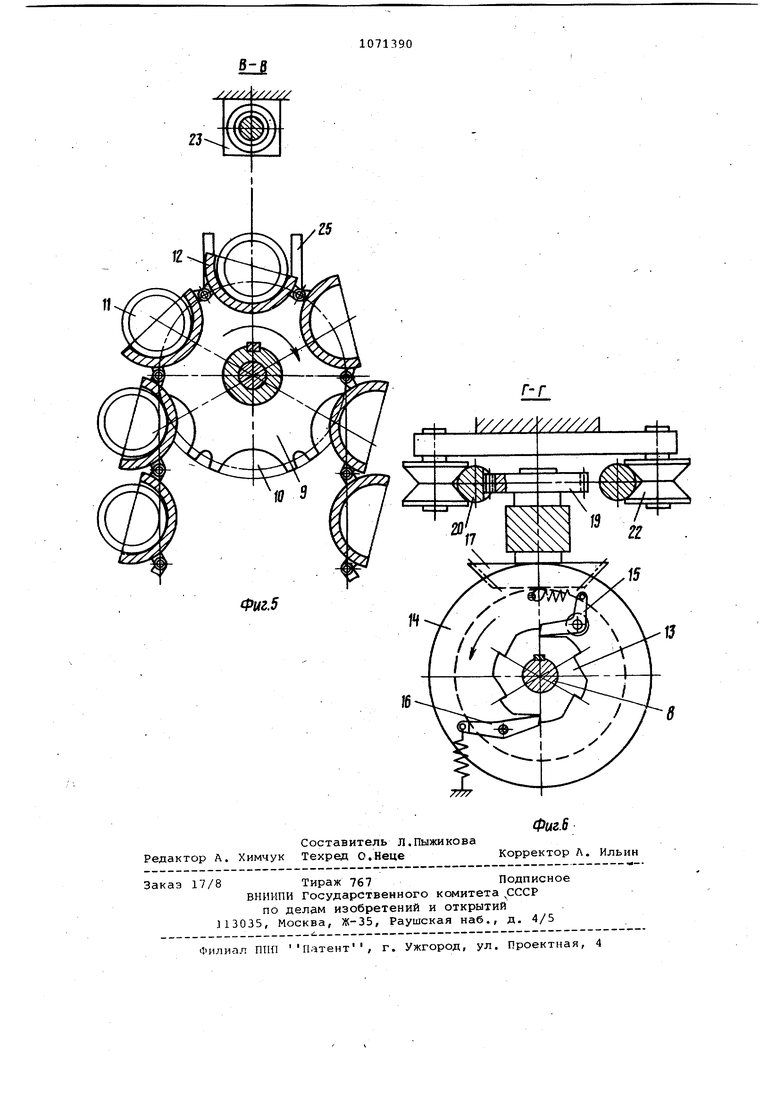
со Изобретение относится к автоматизации технологических процессов машиностроении и может быть исполь зовано при подаче к металлорежущим станкам деталей типа автомобильных гильз, поршней и т.п. Известно элеваторное загрузочно устройство, содержащее бункер, цеп ной тяговый орган с закрепленными на нем захватными органами, а такж средство для выдачи изделий fl. Недостатком известного элеваторного загрузочного устройства является ненадежность при подаче изделий с высотой, превышакщей их диаметр, так как наклонные захваты могут захватывать такие изделия как вдоль их оси, так и поперек, что ме шает их выкатыванию в лоток выдачи К тому же, как известно, такие изде лия плохо катятся из-за перекосов во время качения по наклонной плоскости. Цель изобретения - повышение надежности выдачи устройства изделий типа ступенчатых валиков с высотой превышающей их диаметр. Поставленная цель достигается тем, что в элеваторном загрузочном устройстве, имеющем бункер, цепной тяговый орган с закрепленными на не захватньпли органами, а также средство для выдачи изделий, захватные органы выполнены в виде желобов цилиндрической формы, причем плоскость, проходящая через крайние обр зующие рабочих поверхностей захватяых органов, расположена к плоскости, проходящей через оси.шарниров цепного тягового органа, под острым углом, вершина которого обращена в сторону перемещения захватов, при этом средство для вьщачи изделий расположено с возможностью выдачи последних вдоль их оси. На фиг.1 схематически изображено элеваторное загрузочное устройство, общий вид; на фиг.2 - захваты с раз личными положениями изделий на них; на фиг.З - разрез А-А на фиг.1; на фиг.4 - разрез Б-Б на фиг.З; на фиг.З - разрез В-В на фиг.З; на фиг.6 - разрез Г-Г на фиг.З. Элеваторное загрузочное устройст во содержит основание 1, на котором установлены бункер 2, элеватор 3 с . тяговым органом 4, приводной звездочкой 5, между впадинами которой имеются отверстия 6 для прохода сре ства для вьщачи, выполненного в виде толкателя 7, и соосно установленной с ней на валу 8 звездочкой 9 имеющей между впадинами отверстия Ю для выгрузки изделий 11. Тяговый орган 4 состоит из шарнирно связанных между собой захватов 12, рабочие поверхности которых выполнены в виде желобов цилиндрической формы, образующие которых параллельны общей оси звездочек 5 и 9. Захваты 12 установлены относительно друг друга так, что плоскость, проходящая через крайние образующие рабочих поверхностей захватов 12, расположена под острым углом к плоскости, проходящей через оси шарниров, вершина которого обращена в сторону перемещения захватов. На валу 8 неподвижно закреплено храповое колесо 13и свободно проворачивающееся относительно вала 8 коническое зубчатое колесо 14, на котором закреплена подпружиненная собачка 15, а на корпусе элеватора закреплена обратная подпружиненная собачка 16. Коническое зубчатое колесо 14 зацепляется с коническим зубчатым колесом 17, закрепленным на конце вала 18, который установлен в расточке корпуса элеватора. На другом конце вала 18 закреплено цилиндрическое зубчатое колесо 19, зацепляющееся с зубчатой рейкой 20 механизма выгрузки 21, который установлен на роликовых опорах 22 в верхней части корпуса элеватора. Механизм выгрузки 21 жестко.связан с приводом (в виде цилиндра) 23, закрепленным на корпусе элеватора. На корпусе механизма выгрузки 21.с помощью двойного шарнира 24 закреплен толкатель 7 против отверстий 6 в звездочке 5. С противоположной стороны на корпусе элеватора Против отверстий 10 в звездочке 9 неподвижно закреплен лоток 25 выдачи. Элеваторное загрузочное устройство работает следующим образом. Тяговый орган 4 проходит сквозь окно в дне бункера 2, в результате чего в захваты 12 попадают изделия 11 в любом положении. Но при дальнейшем движении тягового органа 4 вверх в захватах 11 остаются только изделия, ориентированные относительно оси. Изделия с иной ориентацией не могут удержаться в захвате, благодаря форме его выполнения, так как центр тяжести неправильно ориентированного изделия проходит мимо опоры изделия (фиг.2). Тяговый орган 4 перемещается преывисто от цилиндра 23. При ходе цилиндра 23 вправо от зубчатой рейки 20 поворачивается зубчатое колесо 19 и сидящее с ним на одном валу 18 коническое зубчаое колесо 14, а его подпружиненная обачка 1Ь через храповое колесо 13 поворачивает вал 8 с закрепленными на нем приводными звездочками 5 и 9. При ходе цилиндра 23 влево толкатель 7, проходя через соответствующее отверстие 6 звездочки 5, выталкивает изделие в лоток 25. выдачи.
При этом коническое зубчатое колесо 14 вра1цается в обратную сторону, его собачка 15 прощелкивает, а вал 8 остается неподвижньлм и удерживается от проворота подпружиненной собачкой 16.
При повторном ходе цилиндра 23 вправо толкатель 7 отводится в сторону проходящим мимо него захватом 12 (или изделиям) при помощи двойного шарнира 24.
Использование изобретения позволяет повысить надежность при автоматизированной подаче изделий типа автомобильных гильз, поршней и т.п. к металлорежущим станкам.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Элеваторное загрузочное устройство | 1975 |
|
SU529055A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
