(54) ЭЛЕВАТОР ДЛЯ ТРАНСПОРТИРОВАНИЯ ШТУЧНЫХ ГРУЗОВ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для транспортирования изделий | 1979 |
|
SU882887A1 |
| Полочный элеватор для изделий в виде тел вращения | 1980 |
|
SU935393A1 |
| ЗАГРУЗОЧНОЕ УСТРОЙСТВО | 1973 |
|
SU381497A1 |
| Полочный элеватор | 1975 |
|
SU581026A1 |
| Вертикально-замкнутый цепной конвейер | 1989 |
|
SU1682262A1 |
| Элеватор для штучных грузов | 1978 |
|
SU781124A1 |
| Полочный элеватор | 1979 |
|
SU825397A1 |
| Скребково-пластинчатый конвейер | 1977 |
|
SU763213A1 |
| Устройство для удаления деталей с вытянутой осью из рабочей зоны пресса | 1982 |
|
SU1136875A1 |
| Устройство для перегрузки изделий | 1983 |
|
SU1181968A1 |

1
Изобретение относится к промышленному транспорту, а именно к элеваторам для транспортирования . штучных грузов.
Известен элеватор, содержащий тяговые цепи, на которых закреплены грузоносители, каждый из которых выполнен из двух шарнирно соединенных частей - неподвижной и подвижной, и толкатель в виде звездочки для взаимодействия с подвижной частью грузоносителя в месте их разгрузки 1.
Однако этот элеватор предназначен для транспортирования сыпучих грузов и не приспособлен для транспортирования цилиндрических изделий.
Известен также элеватор для транспортирования штучных грузов, содержащий две параллельные тяговые цепи, выходящие ветви которых пропущены через установленный на раме бункер с грузом, грузоносители, выполненные в виде пластин, прикрепленных к звеньям обеих цепей, и имеющие на верхних концах полки для груза, направляющие для грузоносителей и приемный лоток 2.
Недостатком такого устройства является ограниченный диапазон транспортируемых деталей по диаметру ввиду постоянного размера ложементов для грузов. Для транспортирования деталей иного типоразмера необходимо менять пластины, что технологически невыгодно.
Кроме того, позиция выгрузки в устройстве зависит от положения верхней натяжной звездочки и меняется в зависимости от износа цепей, их вытяжки, поэтому необходима дополнительная регулировка приемной части деталей.
10
Цель изобретения - расширение технологических возможностей.
Для достижения цели каждая пластина выполнена из двух шарнирно соединенных частей, верхняя из которых закреплена на цепи, а нижняя - подпружинена относительно верхней и снабжена копирным роликом, а рама снабжена установленным подвижно. в направлении грузонесущих ветвей цепей копиром и кулачком, расположенным напротив приемного лотка.
20 Кроме того, кулачок выполнен подвижным вдоль вертикальной оси элеватора.
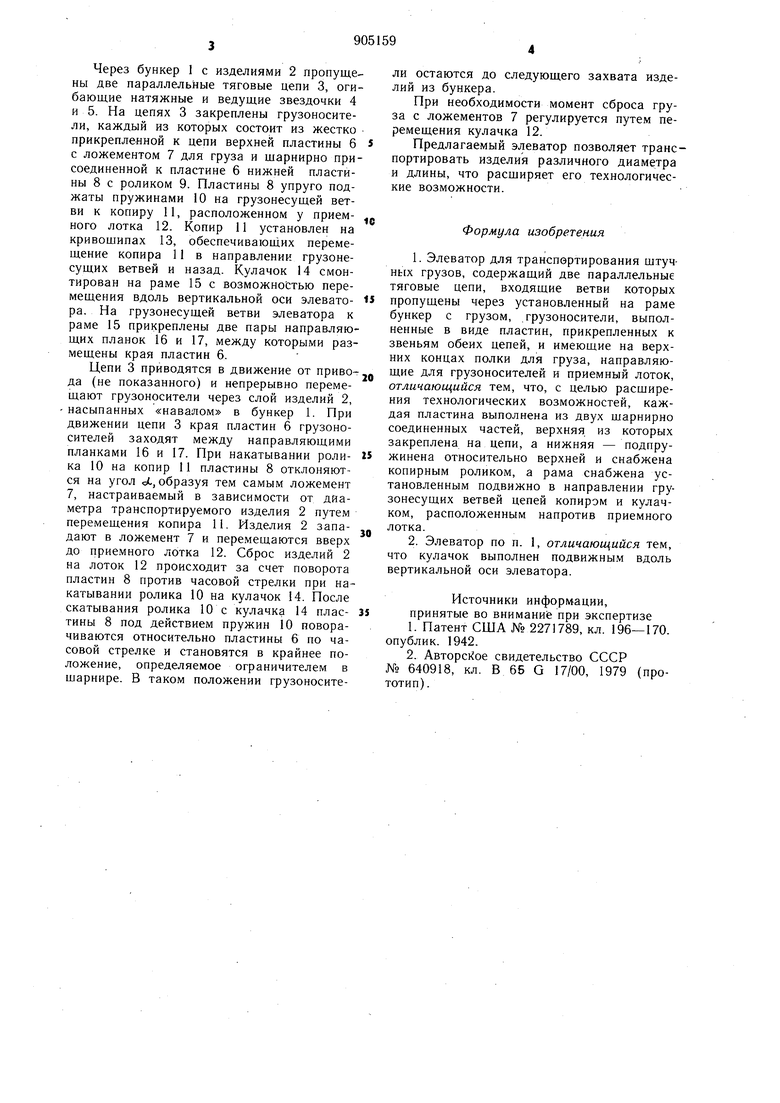
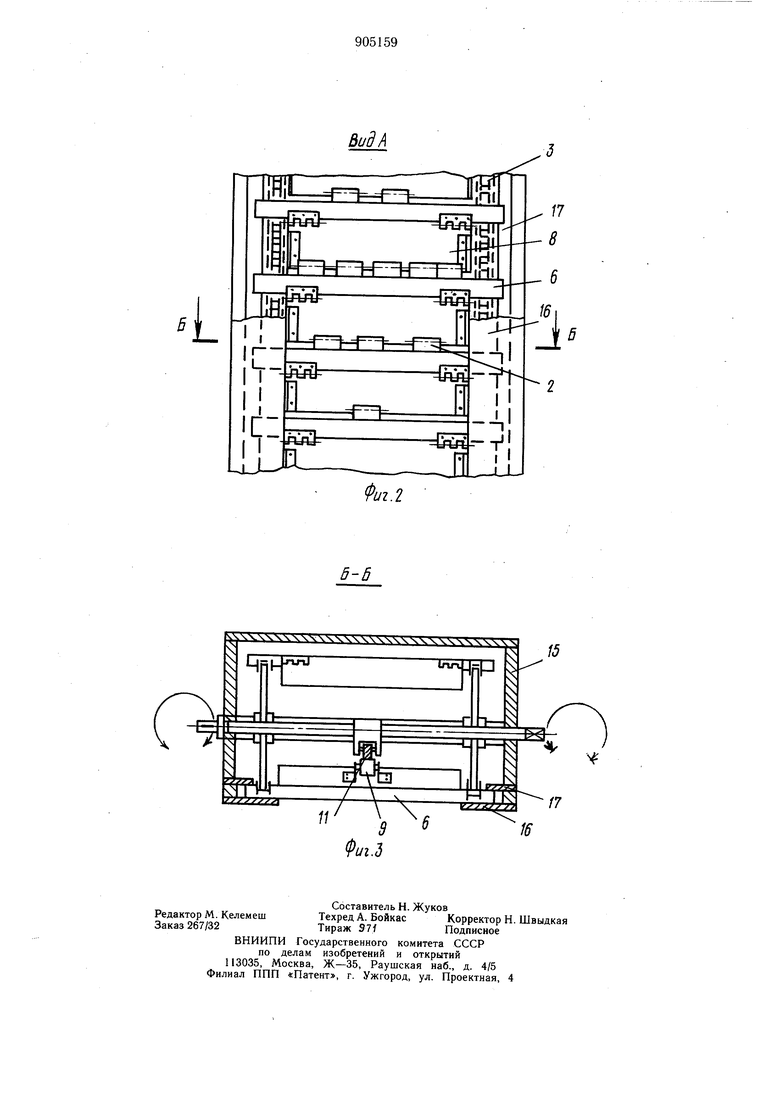
На фиг. 1 показано предлагаемое устройство, общий видена фиг. 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2;
Через бункер 1 с изделиями 2 пропущены две параллельные тяговые цепи 3, огибающие натяжные и ведущие звездочки 4 и 5. На цепях 3 закреплены грузоносители, каждый из которых состоит из жестко прикрепленной к цепи верхней пластины 6 с ложементом 7 для груза и щарнирно присоединенной к пластине 6 нижней пластины 8 с роликом 9. Пластины 8 упруго поджаты пружинами 10 на грузонесущей ветви к копиру И, расположенном у приемного лотка 12. Копир И установлен на кривошипах 13, обеспечивающих перемещение копира 11 в направлении грузонесущих ветвей и назад. Кулачок 14 смонтирован на раме 15 с возможностью перемещения вдоль вертикальной оси элеватоpa. На грузонесущей ветви элеватора к раме 15 прикреплены две пары направляющих планок 16 и 17, между которыми размещены края пластин 6.
Цепи 3 приводятся в движение от привода (не показанного) и непрерывно перемещают грузонрсители через слой изделий 2, насыпанных «навалом в бункер 1. При движении цепи 3 края пластин 6 грузоносителей заходят между направляющими планками 16 и 17. При накатывании ролика 10 на копир 11 пластины 8 отклоняются на угол Х, образуя тем самым ложемент 7, настраиваемый в зависимости от диаметра транспортируемого изделия 2 путем перемещения копира 11. Изделия 2 западают в ложемент 7 и перемещаются вверх до приемного лотка 12. Сброс изделий 2 на лоток 12 происходит за счет поворота пластин 8 против часовой стрелки при накатывании ролика 10 на кулачок 14. После скатывания ролика 10 с кулачка 14 пластины 8 под действием пружин 10 поворачиваются относительно пластины 6 по часовой стрелке и становятся в крайнее положение, определяемое ограничителем в шарнире. В таком положении грузоносители остаются до следующего захвата изделий из бункера.
При необходимости момент сброса груза с ложементов 7 регулируется путем перемещения кулачка 12.
Предлагаемый элеватор позволяет транспортировать изделия различного диаметра и длины, что расщиряет его технологические возможности.
Формула изобретения
Источники информации, принятые во внимани1е при экспертизе
№ 640918, кл. В 65 G 17/00, 1979 (прототип).
ВидА
