I
Изобретение относится к машинам апя произвоцства строительных материаИОВ и прецназначено преимущественно ОЛЯ поворота и укпацки изцеНий в автоматизированных поточных пиниях цпя производства строительных ппит.
И звестен кантователь штучных грузов, включающий переворачивающий механизм с рабочим органом в вице полой рамы с зажимным приспособлением l.
Однако данное устройство имеет мапую произвоцительность.
Наиболее близким по технической сущности и постигаемому результату является устройство для кантования, вкпючакэщее принимающий транспортер с ве-цущими и веаомыми звезцочками, подающий и переворачивающий механизмы и рабочий органс зажимным приспособпением 2.
Недостатком устройства является сложная конструкция и недостаточная произво цит е л ьность.
2
-. ..
Цель изобретения - упрощение конструкции и увеличение производительности.
Указанная цель достигается тем, что переворачивающий механизм вьшолнен в виде авух параллельных вапов, на одном из которых установлены ведомые звездочки, кулачок и кулачкЬвый шкив, а на другом - два рычага апя передачи движения от кулачка на кулачковый шкив, огибаемый гибким элементом с противовесом на конце, при этом рабочий орган выполнен в виде полой рамы.
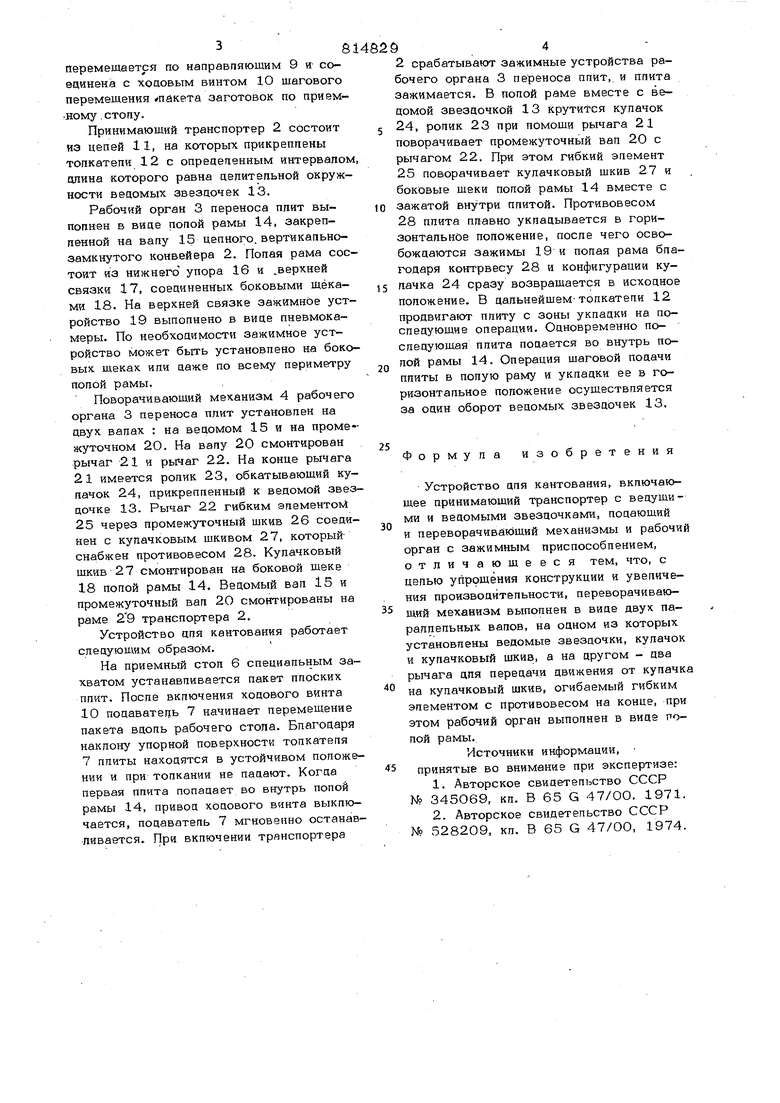
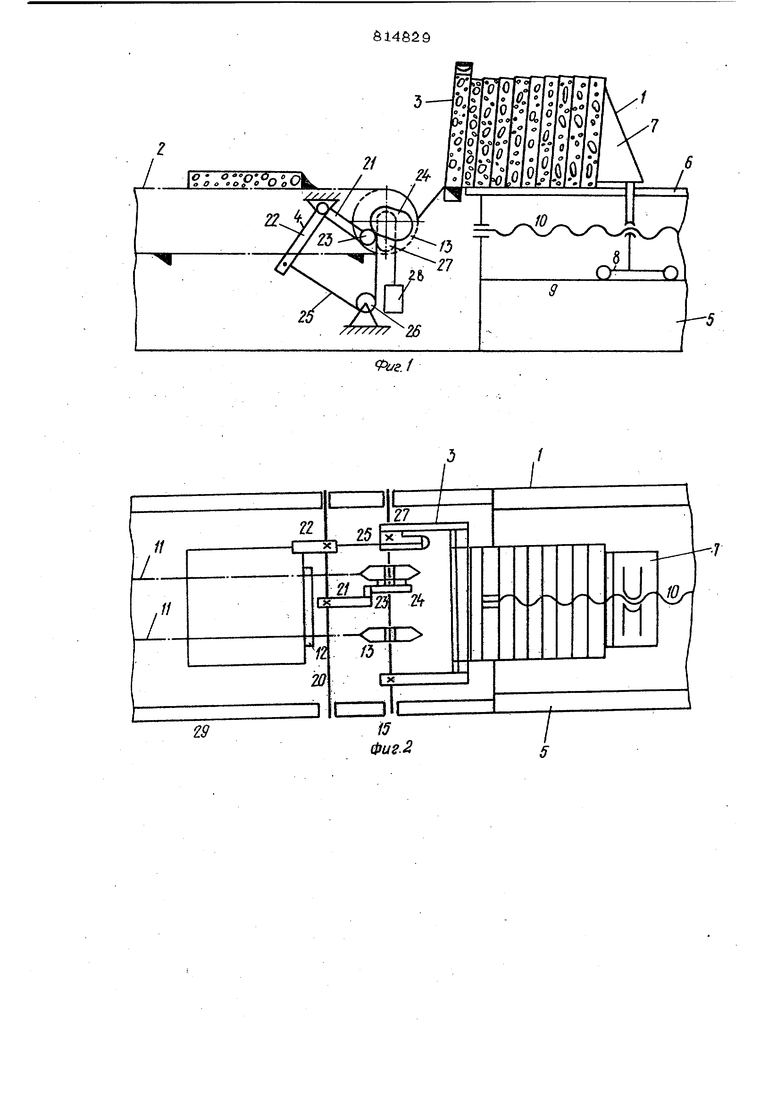
На фиг. 1 изображено устройство кантования, ВИД сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - укладка плиты рабочим органом на транспортер, вид сверху.
Устройство дпя Кантования включает подающий механизм 1, транспортер 2, рабочий орган 3 переноса плит и поворачивающий механизм 4 рабочего органа Подающий механизм 1 имеет основание 5 с приемным столом 6, подаватель 7, смонтированный на тележке 8, которая
Перемещается по направляющим 9 и соединена с хоаовым винтом 10 шагового перемещения пакета заготовок по прием- -ному .стопу.
Принимающий транспортер 2 состоит из цепей 11, на которых прикреппены топкатепи 12с опрецвпенным интервалом цлина которого равна цепитепьной окружности ведомых звездочек 13.
Рабочий орган 3 переноса ппит выпопнен в вице попой рамы 14, закреппенной на вапу 15 цепного, вертикальнозамкнутого конвейера 2. Попая рама состоит из нижнего упора 16 и .верхней связки 17, соединенных боковыми щеками 18. На верхней связке зажимное устройство 19 выпопнено в виде пневмокамеры. По необходимости зажимное устройство может быть установлено на боковых щеках ищи даже по всему периметру попой рамы.
Поворачивающий механизм 4 рабочего органа 3 переноса ппит установпен на двух вапах : на ведомом 15 и на промежуточном 20. На вапу 20 смонтирован рычаг 21 и рьиаг 22. На конце рычага 21 имеется ропик 23, обкатывающий купачок 24, прикреппенный к ведомой звездочке 13. Рычаг 22 гибким эпементоМ 25 через промежуточный щкив 26 соединен с купачковым шкивом 27, которыйснабжен противовесом 28. Кулачковый щкив 27 смонтирован на боковой щеке 18 попой рамы 14. Ведомый вап 15 и промежуточный вап 20 смонтированы на раме 29 транспортера 2.
Устройство дпя кантования работает следующим образом.
На приемный стоп 6 специальным захватом устанавливается пакет ппоских ппит. Поспе включения ходового винта 10 подаватепь 7 начинает перемещение пакета вцопь рабочего стопа. Благодаря наклону упорной поверхности толкателя 7 плиты находятся в устойчивом положении и при толкании не падают. Когда первая ппита попадает во внутрь попой рамы 14, привод ходового винта выкпю- чается, подаватель 7 мгновенно останавливается. При включении транспортера
2 срабатывают зажимные устройства рабочего органа 3 переноса плит, и плита зажимается. В попой раме вместе с ведомой звездочкой 13 крутится купачок 24, ролик 23 при помощи рычага 21 поворачивает промежуточный вал 20 с рычагом 22. При этом гибкий элемент 25 поворачивает кулачковый шкив 27 и боковые щеки попой рамы 14 вместе с
зажатой внутри плитой. Противовесом 28 плита плавно укладывается в горизонтальное положение, после чего освобождаются зажимы 19 и полая рама благодаря контрвесу 28 и конфигурации кулачка 24 сразу возвращается в исходное положение. В дальнейшем-толкатели 12 продвигают плиту с зоны укладки на последующие операции. Одновременно последующая плита подается во внутрь полой рамы 14. Операция шаговой подачи плиты в полую раму и укладки ее в горизонтальное положение осуществляется за один оборот ведомых звездочек 13.
Формула изобретения
Устройство для кантования, включающее принимающий транспортер с ведущими и ведомыми звездочками, подающий и переворачивающий механизмы и рабочи орган с зажимным приспособлением, отличающееся тем, что, с целью упрощения конструкции и увеличения производительности, переворачивающий механизм выполнен в виде двух параллельных валов, на одном из которых установлены ведомые звездочки, кулачок и кулачковый шкив, а на другом - два рычага для передачи движения от кулачк на кулачковый шкив, огибаемый гибким элементом с противовесом на конце, при этом рабочий орган выполнен в виде полой рамы.
Источники информации, принятые во внимание при экспертизе:
1.Авторское свидетельство СССР
№ 345069, кл. В 65 G 47/00. 1971.
2.Авторское свидетельство СССР
NO 528209, кп. В 65 G 47/00, 1974.
1Ь 15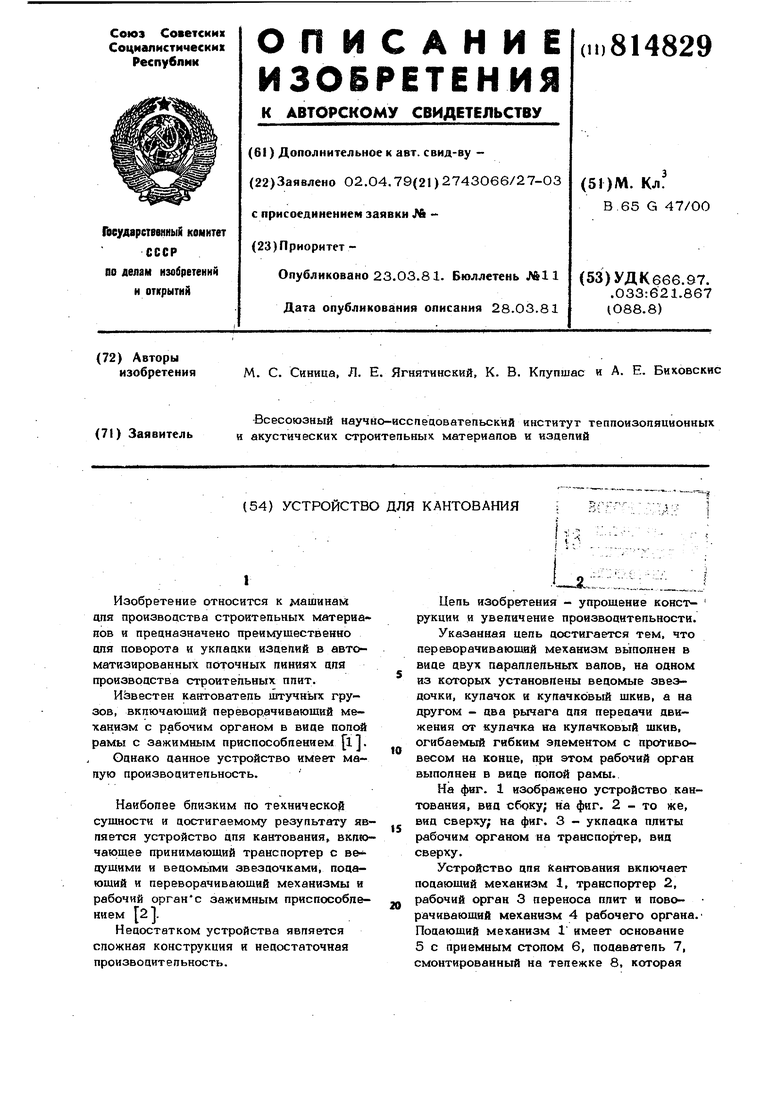
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для кантования | 1981 |
|
SU994371A1 |
| Установка для обработки плоских строительных плиток | 1973 |
|
SU482315A1 |
| АППАРАТ ДЛЯ ОТДЕЛЕНИЯ ПРОБКИ И ЛУБА ЛАКРИЧНОГО КОРНЯ | 1999 |
|
RU2150808C1 |
| Устройство для кантования изделий | 1988 |
|
SU1535799A1 |
| Дозатор загрузчика минеральных удобрений | 1982 |
|
SU1021380A1 |
| Машина для отделения листьев | 1982 |
|
SU1045847A1 |
| Устройство для переворачивания плоского листового материала | 1979 |
|
SU925801A1 |
| Устройство для удаления облоя с деталей из полимерных материалов | 1980 |
|
SU903153A1 |
| Самоходный многорядный картофелеуборочный комбайн | 1990 |
|
SU1811772A1 |
| Машина для прочески щетины и волоса | 1940 |
|
SU59602A1 |

12 И 19 18 Фаг.Ъ
29
/4 16
