1
Устройство относится к производству средств измерения массы в потоке.
Известно устройство для измерения веса сыпучих материалов в потоке, содержащее грузоприемную платлорму, выполненную в виде бесконечной ленты, установленные под лентой ча заданном расстоянии друг от друга ограничитель ные опоры, между которыми расположен взваиивайщий механизм, выполненный в виде воспринимающей вес материала площадки, связанной с датчиком веса через систему перекрещивающихся рычагов, опирающихся с одной стороны,на роликовые опоры, а на другой шарнирные l .
Однако известное устройство имеет сложную конструкцию и для оРеспечения высокой точности взвешивания требует изготовления ряда сложных узлов .
Наиболее близким к предлагаемому по технической сущности являются конвейерные весы, содержащие грузонесущий транспортирующий орган, натянутый между приводным и неприводным колесами, и датчик веса C lОднако наличие в данной конструкции весов грузоприемной и взвешивающих участков, а также четырехзвенных механизмов вызывает необходи эсть изготовления большого количества точно изготовляемых узлов и деталей и, следовательно, приводит к увеличению габаритов весов и усложнению конструкции. Кроме того, вольюое число шарнирных соединений в четырехзвеиных механизмов обуславливает относительно высокую погрешность взвешивания.
Цель изобретения - упрощение конструкции и повышение точности взвешивания.
Эта цель достигается тем, что устройство снабжено нагружающим элементом, выполненным в виде рычага, жестко закрепленного на оси приводного колеса, а датчик веса установлен с торцовой части того же колеса с возможностью взаимодействия с нагружающим элементом.
Кроме того, нагружаювдий элемент выполнен в виде вилки, а датчик веса размеп1ен между концами вилки.
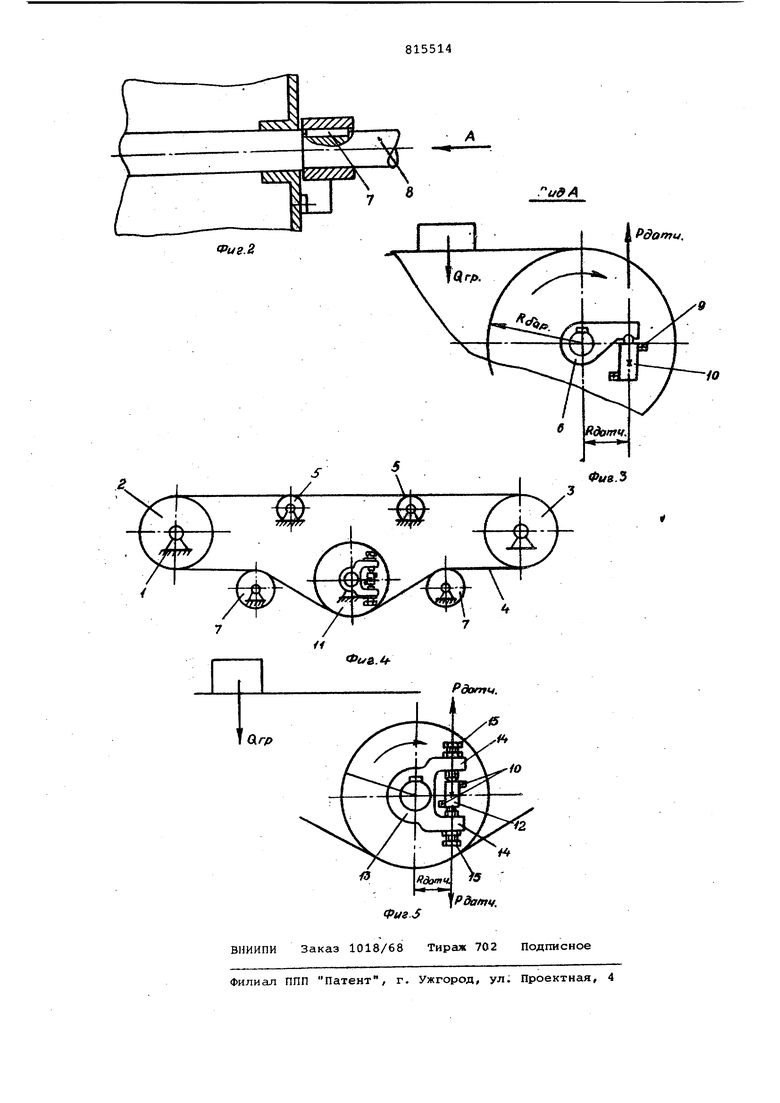
На фиг. 1 изображено устройство с нагружающим элементом в виде рычага, общий вид; на Лиг. 2 - место крепления нагружающего элемента и датчика; на «иг. 3 - вид А на фиг. 2; на фиг. 4 - устройство, в котором нагружающий элемент выполнен в виде вилки, общий вид; на фиг. 5 показано взаимодействие нагружающего элемента в виде вилки с датчиком.
Устройство для измерения веса состоит из рамы 1,. двух барабанов 2 и 3 и бесконечной транспортерной ленты 4. Роликррпоры 5 служат для предотвращения провисания ленты 4. Рычаг 6 с помощью йШицевого соединения 7 связан с приводным валом 8. На торцовой стороне барабана 3 посредством болтовых соединений 9 с возможностью восприятия нагрузки от рычага 6 жестко закреплен датчик 10 веса.
Устройство работает след.ующим образом.
Вал 8 посредством привода (на чертеже не показан) приводится во вращательное д вижение в направлении, показанном на Лиг. 3. С помощью шлицевого соединения 7 принимает вращательное движение и рычаг б, который воздействует на датчик 10 веса и, следовательно, на барабан 3. Последний с датчиком 10 веса начинает вращение и передает движение ленте 4, на который подается взвешиваемый материал. При этом датчиком 10 веса от рычага 6 воспринимается нагрузка, величина которой характеризует значение крутящего момента, передаваемого валом 8. Сигнал от вращающего датчика 10. выводится через скользящий Контакт коллектора (не показаны) При выполнении устройства для взвешивания с реверсивным движением транспортерной ленты (фиг. 4) с помощью барабана 11, являющимся колесом реверсивного привода (не показан), роликоопоры 12 служат для предотвращения провисания и натяжения ленты 4. Вилка 13 с помощью шлицёвого соединения 7 связана с приводным валом 8. На торцовой стороне барабана 11 посредством болтовых соединений с возможностью восприятия нагрузок от концов 14 вилки 13 жестко закреплен датчик 10 веса. Необходимую предварительную нагрузку на датчик 10 веса обеспечивают регулировочными винтами 15.
После выбора необходимого направления транспортирования, обеспечиваемого реверсивным приводом, приводится во вращение вал 3. С помощью шлицёвого соединения 7 принимает . вращательное движение и вилка 13, которая в зависимости от направления -вращательного движения одним из концов 14 воздействует на датчик 10 веса и, следовательно, на барабан 11. Последний вместе с датчиком веса 10 начинает вращения и передает движение ленте 4, на которую подается взвешиваемый материал. При этом датчиком 10 веса от соответствуклч.его конца 14 вилки 13 воспринимается нагрузка, величина которой характеризует значение крутящего момента, передаваемого валом 8.
Сигнал от вращающего датчика 10 выводится через скользящий контакт 0 коллектора (не показан).
Формула изобретения
1.Устройство для измерения веса, сОдержш ее грузонесущий транспортирующий орган, натянутый между приводным и неприводнши колесами, и датчик веса, о т л И ч а ю 14 е е с я тем что, с целью упрощения конструкции и повьйиения точности взвешивания, оно снабжено нагружаю1аим элементом, выполненным в виде рычага, жестко закрепленного на оси приводного колеса а датчик веса установлен с торцовой части того же колеса с возможностью взаимодействия с нагружающим элементом.
2.Устройство по п. 1, отличающееся тем, что нагружающий элемент выполнен в виде вилки,
а датчик веса размещен между концами вилки.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 207425, кл. G 01 G 11/00, 1966.
2.Авторское свидетельство СССР № 535463, кл. G 01 G 11/00, 1975 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Конвейерные весы | 1976 |
|
SU561090A1 |
| КОНВЕЙЕРНЫЙ ВЕСОИЗМЕРИТЕЛЬ СЫПУЧИХ МАТЕРИАЛОВ | 1969 |
|
SU236794A1 |
| Конвейерные весы | 1975 |
|
SU535463A1 |
| РОТАЦИОННЫЕ ВЕСЫ-ДОЗАТОР ХОЗИНА В.В. | 2005 |
|
RU2382338C2 |
| Весы соотношения расходов сыпучих материалов | 1972 |
|
SU441454A1 |
| Конвейерные весы | 1985 |
|
SU1275224A1 |
| Конвейер | 1979 |
|
SU839912A1 |
| Весовой порционный дозатор | 1972 |
|
SU437920A1 |
| Весовой дозатор | 1991 |
|
SU1793258A1 |
| Способ градуировки и поверки конвейерных весов | 1989 |
|
SU1758443A1 |