1
Изобретение относится к технике непрерывного дозирования порошков в смесители, грануляторы и другое технологическое оборудование в химической, строительной, пищевой и других отраслях промышленности.
Известны квазинепрерывные весы, состоящие из периодически работающего питателя и весов с ленточным грузоприемным устройством, взвешивающих движущийся распределенный по ленте сыпучий материал в тот момент, когда нет поступления его и схода с весов. Таким образом, непрерывное взвешивание заменяется периодическим взвешиванием распределенной порции, а интервалы между распределенными порциями уменьшаются до минимума.
Однако такие весы не обеспечивают достаточно высокой мгновенной точности дозирования из-за значительных динамических погрешностей, связанных с поступлением и сходом порощка в весоизмерительном и транспортирующем устройствах.
В предлагаемом весовом порционном дозаторе между весоизмерительным механизмом и ленточным транспортером установлен распределитель дозируемого материала, выполненный в виде горизонтальной трубы с продольным окном, периодически перекрываемым заслонкой, причем распределитель кинематически связан с системой автоматики, управляющей дозатором.
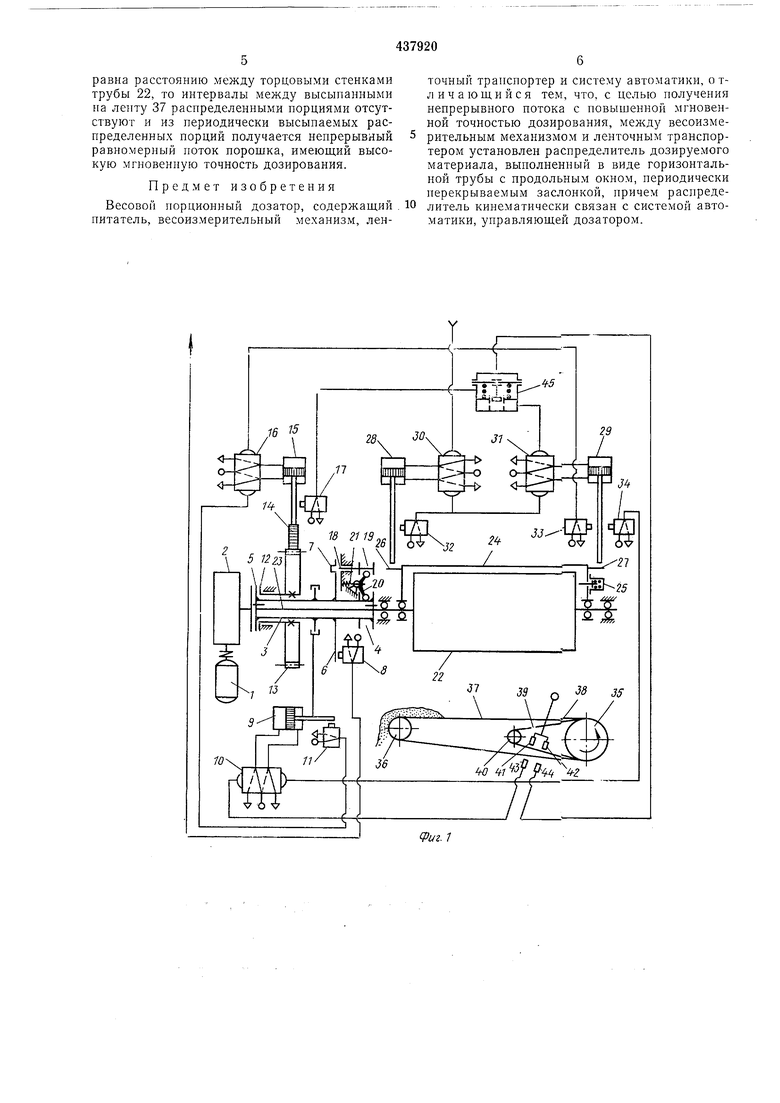
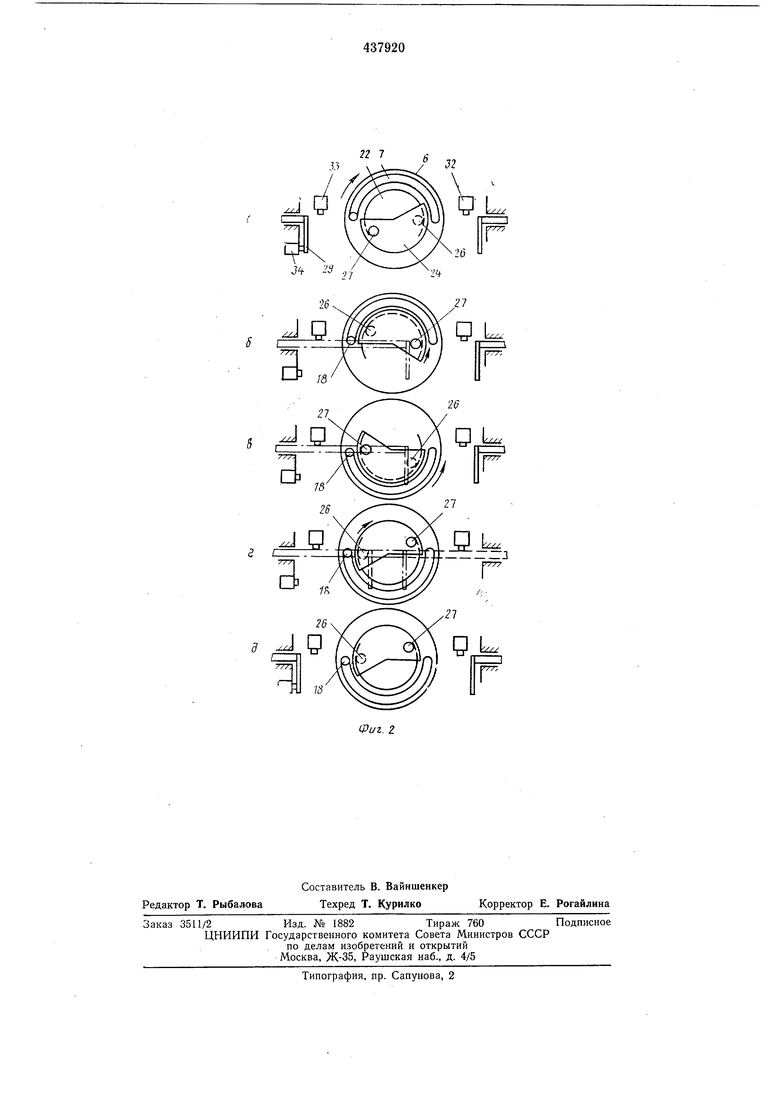
На фиг. 1 показан дозатор (без питателя и весоизмерительного механизма); на фиг. 2,а-д, приведена схема ориентации трубы распределителя и положений заслонки. Весовой порционный дозатор состоит из питателя, весоизмерительного механизма (не показан), распределителя, установленного под весоизмерительным механизмом и состоящего из электродвигателя 1, редуктора 2, муфты 3
с кольцевой проточкой 4, двусторонним фрикционным диском 5 и диском 6 с торцовым полукольцевым пазо.м 7, конечным выключателем 8, пневмоцилиндром 9, воздухораспределителем 10 и конечным выключателем II, полого промежуточного вала 12 с зубчатым колесом 13 и зубчатой рейкой 14 на пневмоцилиндре 15 с воздухораспределителем 16 и конечным выключателем 17; фиксирующего штока 18 с кольцевым пазом 19, рычага 20,
пружины 21, горизонтальной трубы 22 с продольным окном и вертикальными крышками, переходящими в соосные горизонтальные полувалы 23, на которых установлена кольцевая заслонка 24, снабженная пружинным зажимом 25 и упорами 26 и 27, для пневмоцилиндров 28, 29 с воздухораспределителями 30, 31 и конечными выключателями 32, 33, 34.
Под распределителем установлен ленточный транспортер, состоящий из привода, размещенного в приводном барабане 35, натяжного барабана 36, грузовой ленты 37, ленты 38 с отверстием 39, натяжного барабана 40, распределительных 41, 42 и приемных 43, 44 сонл.
Дозатор работает следующим образом.
В случае отсутствия материала в чаше весового механизма автоматически включается питатель, и материал из бункера поступает в чашу весового механизма. С приближением к положению равновесия питатель уменьшает скорость подачи, а по достижении равновесия весового механизма подача порошка прекраш,ается. Весовой механизм готов к разгрузке.
Разгрузка порции с весового механизма возможна лишь тогда, когда поступает сигнал от конечного выключателя 8 о том, что горизонтальная труба 22 ориентирована для приема порции порошка, и кольцевая заслонка 24 на трубе открыта (фиг. 2,8). При поступлении сигнала на весовой механизм происходит опрокидывание чаши весового механизма и одновременно отрабатывается сигнал, поступаюш;ий на весовой механизм и распределитель порошка. В весовом механизме сигнал служит командой для следующего цикла взвешивания.
В распределителе порошка сигнал поступает на воздухораспределитель 30, открывающий доступ воздуха к пневмоцилиндру 28, который, нажимая на упор 26, перемещает заслонку 24 и закрывает продольное окно в трубе 22. При этом шток пружинного зажима 25 попадает в паз на торцовой крышке трубы 22 и фиксирует заслонку 24 в закрытом положении. Когда окно в трубе 22 закрыто, срабатывает конечный выключатель 32, который подает сигнал на воздухораспределители 30 и 31, возвращающие щтоки пневмоцилиндров 28, 29 в положения, не препятствующие вращению горизонтальной трубы 22 с кольцевой заслонкой 24 (фиг. 2,d).
При возвращении штоков пневмоцилиндров включается конечный выключатель 34, подающий сигнал на воздухораспределитель 10, управляющий пневмоцилиндром 9. Пневмоцилиндр, перемещаясь в левое крайнее положение, увлекает муфту 3: При этом кольцевая проточка 4 нажимает на рычаг 20 до тех пор, пока пружина 21 не перебросит фиксирующий шток 18 в правое крайнее положение, при котором он выходит из паза 7. Фрикционный диск 5 отходит от торца промежуточного полого вала 12 и входит в зацепление с полумуфтой на валу редуктора 2. В результате горизонтальная труба 22 с продольным окном, закрытым кольцевой заслонкой 24, приводится во вращение.
За счет вращения горизонтальной трубы 22 происходит равномерное распределение порошка по длине трубы. Остановка горизонтальной трубы осуществляется по команде струйных датчиков, когда отверстие 39 в движущейся ленте 38 совпадает с отверстием в соплах 43, 41. Сигнал от сопла 43 поступает к воздухораспределителю 10. Он подает воздух к пневмоцилиндру 9, который перемещает муфту 3 вправо, последовательно отключая ее от редуктора 2 и замыкая фрикционный диск
5 с торцом промежуточного полого вала 12. При этом кольцевая проточка 4 перемещает рычаг 20 до тех пор, пока пружина 21 не перебросит фиксирующий шток 18 в левое положение. Регулировкой достигается такая работа пружины 21, которая позволяет перебрасывать фиксирующий шток 18 в левое положение в самом конце перемещения муфты 3, т. е. когда диск 5 вошел в контакт с неподвижным
в данный момент промежуточным валом 12 и труба 22 остановилась. Однако фиксирующий щток 18 может сразу не попасть в паз 7. При полном ходе пневмоцилиндра 9 конечный выключатель 11 подает сигнал на воздухораспределитель 16, который приводит в действие пневмоцилиндр 15 с зубчатой рейкой 14. При перемещении рейки 14 колесо 13, промежуточный вал 12, муфта 3 с трубой 22 начинают поворачиваться. Вращение происходит до тех
пор, пока фиксирующий шток 18 не попадаег в полукольцевой паз 7 и труба 21 не займет строго определенного положения, при котором фиксирующий шток 18 упрется в край полукольцевого паза 7 (фиг. 2,а). Так как к этому
моменту пневмоцилиндр 15 не совершил полного хода, то перемещение рейки 14 продолжается, но при этом полый вал 12 проскальзывает по фрикционному, теперь неподвижному диску 5. При полном ходе иневмоцилиндра
15 включается конечный выключатель 17, который сигнализирует о готовности трубы 22 к разгрузке распределенного порошка. Сигнал поступает на клапан 45, который управляется соплом 44.
При прохождении отверстия 39 между соплами 42, 44 сжатый воздух через отверстие 39 поступает на клапан 45. Клапан 45, срабатывая, посылает импульс к воздухораспределителю 31, включающему пневмоцилиндр 29.
Пневмоцилиндр, нажимая на упор 27, перемещает кольцевую заслонку 24 до тех пор, пока вышедший из паза пружинный зажим 25 попадает в новый паз и фиксирует кольцевую заслонку 24 в открытом положении (фиг. 2,6).
Распределенный порошок высыпается на грузовую ленту 37. Конечный выключатель 33 на пневмоцилиндре 29 подает сигнал на воздухораспределитель 16, который открывает доступ воздуха к пневмоцилиндру 15, и он совершает
обратный ход.
Зубчатое колесо 13 вместе с трубой 22 поворачивается до тех пор, пока фиксирующий шток 18 упирается в противоположный край полукольцевого паза (фиг. 2,в). При этом труба 22 поворачивается на 180°, а рейка 14 возвращается в исходное положение. Промежуточный полый вал 12 проскальзывает относительно диска 5. При повороте трубы 22 на 180° конечный выключатель 8 подает сигнал
на весовой механизм и при готовности весового механизма к разгрузке происходит загрузка следующей порции порошка в распределитель. Следующая разгрузка распределенной порции на транспортер осуществляется через один
оборот ленты 38. Поскольку длина ленты 38
равна расстоянию между торцовыми стенками трубы 22, то интервалы между высыпанными на ленту 37 раснределенными порциями отсутствуют и из периодически высыпаемых распределенных порций получается непрерывный равномерный поток порошка, имеющий высокую мгновенную точность дозирования.
Предмет изобретения
Весовой порционный дозатор, содержащий питатель, весоизмерительный механизм, ленточный транспортер и систему автоматики, отличающийся тем, что, с целью получения непрерывного потока с повышенной мгновенной точностью дозирования, между весоизмерительным механизмом и ленточным транспортером установлен распределитель дозируемого материала, выполненный в виде горизонтальной трубы с продольным окном, периодически перекрываемым заслонкой, причем распределитель кинематически связан с системой автоматики, управляющей дозатором.
| название | год | авторы | номер документа |
|---|---|---|---|
| Весовой дозатор | 1974 |
|
SU525855A1 |
| Распределитель порошкообразного материала для весовых дозаторов непрерывного действия | 1977 |
|
SU690314A1 |
| Устройство для затаривания губчатогоТиТАНА | 1974 |
|
SU806782A1 |
| Установка для приготовления многокомпонентной смеси | 1988 |
|
SU1609678A1 |
| УСТРОЙСТВО ДЛЯ ДОЗИРОВАНИЯ ПЛОХОСЫПУЧИХ МАТЕРИАЛОВ | 1965 |
|
SU224832A1 |
| Пневматический весовой дозатор непрерывного действия | 1984 |
|
SU1185104A1 |
| Загрузчик сыпучего полимерного материала | 1977 |
|
SU737225A1 |
| ВЕСОВОЙ ДОЗАТОР ПОРОШКА | 2008 |
|
RU2383872C1 |
| УСТАНОВКА ДЛЯ РАСФАСОВКИ СЫПУЧИХ ПРОДУКТОВ В БАРАБАНЫ | 2004 |
|
RU2266848C1 |
| ВЕСОВОЙ АВТОМАТИЧЕСКИЙ ДОЗАТОР | 1997 |
|
RU2110773C1 |
Й/г. 7
