Изобретение относится к- электротехнике и может быть использовано в электроприводах нужд электростан- ций.
Целью изобретения является расширение диапазона регулирования частоты вращения.
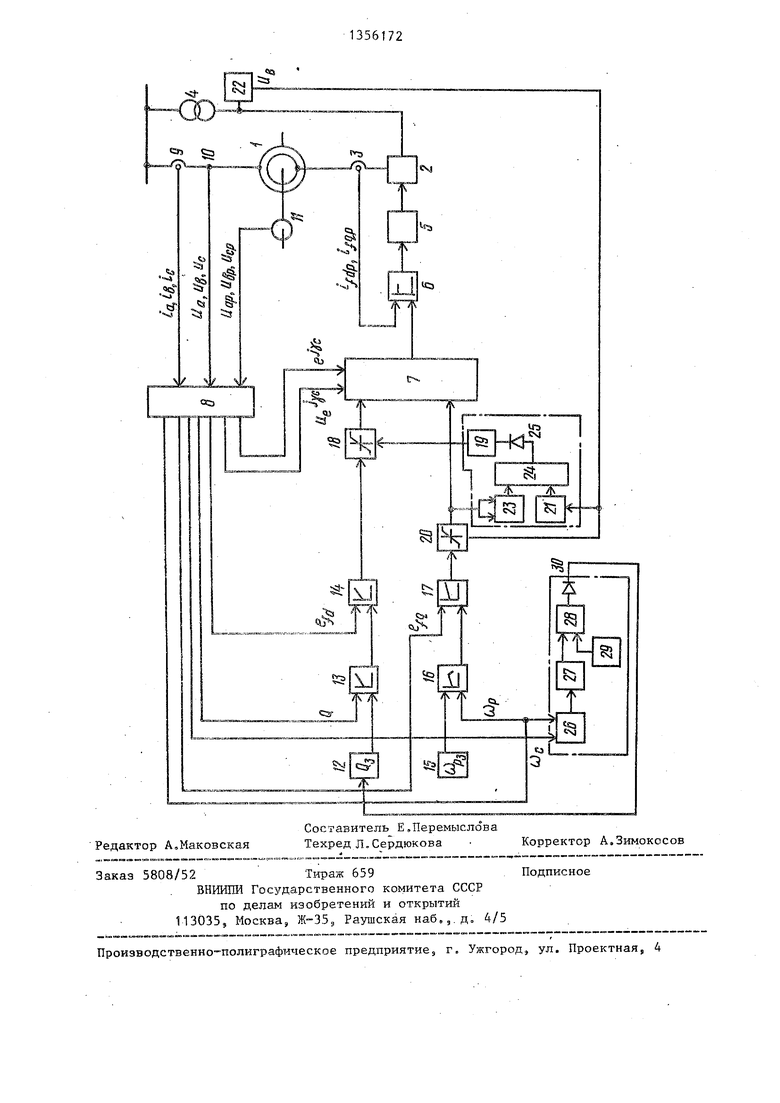
На чертеже представлена схема предлагаемого устройства.
Устройство для управления машиной
1двойного питания содержит тиристор- ный преобразователь 2 частоты, выход которого через датчик 3 тока ротора предназначен для подключения к выводам роторной обмотки машиныодвойного питания, питающий вход тиристорного преобразователя частоты подключен к вторичной обмотке согласующего трансформатора 4, первичная обмотка которого предназначена для подключения
к источнику питания, управляющий вход тиристорного преобразователя 2 частоты подключен к выходу блока 5 управления тиристорным преобразователем
2частоты, вход которого подключен к выходу регулятора 6 фазных токов ротора, первый вход которого подключен
к датчику 3 тока ротора, второй вход регулятора 6 фазных токов ротора подключен к выходу блока 7 преобразования координат четырьмя входамиs два из которых соединены с первым и вторым выходами блока 8 преобразования параметров режима, входы которого подключены соответственно к датчику 9 .тока статора, датчику 10 напряжения статора и датчику 11 углового пололшпия ротора; последовательно соединенные между .собой задатчик 12 реактивной мощности, первый 13 и второй 14 регуляторы реактивной мощное
преобразования параметров режима соединены соответственно с вторыми вхо дами первого 13 и второго 14 регуляторов реактивной мощности последовательно соединенные между собой задатчик 15 частоты вращения ротора, первый 16 и второй 17 регуляторы частоты вращения, второй вход второго регулятора частоты вращения соединен с пятым выходом блока 8 преобразования параметров режима, шестой выход которого еоединен с вторьм входом первого регулятора 16 частоты вращения, выход второго регулятора 14 реактивной мощности соединен с первым входом первого блока 18 регулируемого
ограничения, второй вход которого соединен с выходом блока 19 извлечения корня квадратного, выход первого
блока 18 регулируемого ограничения соединен с третьим входом блока 7 преобразования координат, выход второго регулятора 17 частоты вращения соединен с первым входом второго блока 20 регулируемого ограничения, второй вход которого соединен с входом задатчика 21 потолочного значения напряжения возбуждения и с выходом датчика 22 напряжения источника возбуждения, выход второго блока 20 регулируемого ограничения соединен с четвертым входом блока 7 преобразования координат и с блоком 23 перемножения, выход которого соединен
с первым входом первого блока 24 суммирования, второй вход которого соединен с выходом задатчика 21 потолочного значения напряжения возбуждения, выход первого блока 24 суммирования через первый диод 25 соединен с входом блока 19 извлечения корня квадратного, седьмой выход блока 8 преобразования параметров режима соединен с первым входом второго блока
26 суммирования, второй вход которого соединен с вторым входом первого
регулятора 16 частоты вращения, выход второго блока 26 суммщзования соединен с входом блока 27 модуля
скольжения, выход которого соединен с первым входом компаратора 28, второй вход которого подключен к выходу задатчика 29 уровня скольжения, выход компаратора 28 через второй диод
30 подключен к входу задатчика 12 реактивной мощности.
Первый регулятор 13 реактивной мощности выполнен в виде пропорционально-интегрального регулятора реактивной мощности, второй регулятор 14 - как пропордионально-интеграль- ный регулятор проекции тока ротора на ось d синхронных осей координат.
Первый регулятор 16 частоты вращения выполнен как пропорционально- интегрально-дифференциальный регулятор частоты вращения ротора, второй регулятор 17 частоты вращения - как пропорционально-интегральный регулятор проекции тока ротора на ось gj синхронных осей координат.
Устройство функционирует следующим образом.
31
При изменении задающего сигнала на скорость с помощью задатчика 15, выполнейного как задатчик интенсивности, изменяется сигнал на выходе регулятора 16, охваченного отрицательной обратной связью по скорости вращения ротора, вычисляемой в блоке 8 преобразования параметров режима. На входы регулятора 17 посту- пают сигналы задания на величину активного тока ротора с выхода регу ля- тора 16 и вычисленного в блоке 8 преобразования параметров режима активного тока ротора, являющегося в сущ- ности отрицательной обратной связью по активной мощности, так как определяется как проекция на напряжение питающей сети. На выходе регулятора 17 появляется сигнал рассогласования Который через блок 20, блок 7 преобразования координат, через регулятор 6 фазных токов ротора, блок 5 управления тиристорным преобразователем и тиристорный преобразователь 2 час- тоты поступает на кольца ротора машины 1 двойного питания и воздействует таким образом, чтобы скорость машины 1 отвечала заданному значению. При наличии колебаний в напряжении питающей сети устройство действует описанным выше способом и колебания напряжения питающей сети не передаются на момент и скорость вращения мащины 1 двойного питания.
Пока машина 1 не достигнет своего потолочного значения напряжения возбуждения, устройство работает аналогично прототипу.
При возмущениях в питающей сети, например при исчезновении напря ке- ния при той же нагрузке на валу, машина 1 двойного питания начинает тормозиться. При появлении напряжения в питающей сети и возобновлении работы машины 1 двойного питания устройство действует в сторону восстановления режима в соответствии с уставками за- датчиков 12 и 15. Однако, если перерыв в питании достаточно долгий, скольжение машины. 1 оказьшается наибольшего номинального значения цо котором напряжение возбуждения равно потолочному значению, и машина 1 практически неуправляема, режум в соответствии с уставками за- датчиков 12 и 15 не восстанавливается. При этом, как показали теоретические и экспериментальные исследова72
ния, машины двойного питания могут без увеличения установленной мощности системы возбуждения и кратности напряжения ротора кратковременно работать в режимах потребления реактивной мощности со скольжением, в 1- (5-2) раза большим номинального наибольшего значения. Максимально возможное скольжение при сохранении активной мощности (момента) статора на заданном уровне достигается переводо машины двойного питания в режим потребления реактивной мощности вплоть до значения Q -U /X , где X пе- ре;- ;одное индуктивное сопротивление статорной цепи машины до мощных шин с напряжением const.
В данном устройстве это реализуется следующим образом.
Сигнал и, управления, сформированный в первом канале, с выхода регулятора 17 поступает на третий вход блока 7 преобразования координат и на вход задатчика 21. В блоке 23 перемножения этот сигнал возводится в квад
D
рат и с сигналом Uj от задат -птка 21 потолочного значения напряжения возбуж,дения, пропорционального квадрату потолочного значения напрях ения возбуждения, в блоке 24 суммирования взаимно вычитается. Разностньш сигнал через диод 25, обеспечивающий прохождение сигнала заданной полярности, поступает на вход блока 19 извлечения корня квадратного, на выходе которого формируется сигнал:
-|иГ
11
U2
(О
Этот сигнал в качестве оперного напряжения поступает на управляющий вход блока 19 регулируемого ограничения напряжения, тем самым ограничивая по величине сигнал управления с выхода регулятора 14. Регулирование машиной 1 двойного питания сигналами, сфор} 1ированными в соответствии с (1), всегда обеспечивает приоритет одному из каналов. На чертеже показан вариант, когда приоритет отдается 1-му каналу - каналу формирования сигналов управления по частоте вращения ротора и по моменту. Поскольку при этом на сигнал управления U «е накладьшается дополнительных ограничений, то, пока он меньше U.f „р машина 1 полностью управляема и сохраняет свои свойства по управлению
10
15
20
25
51356172
коростью и моментом в соответствии уставкой задатчика 15. Для соблюдеия условия ц и. „д сигнал с выода регулятора 17 также проходит ерез блок 20 регулируемого ограниения (аналогично блоку 18) Естестенные колебания напряжения источниа возбуждения вызывают изменение веичины напряжения на тиристорном пре- образователе 2 частоты, а следовательно, увеличение или гменьшение потолочного значения напряжения возбуждения. Поэтому для учета этих значений в регулировании задатчик 21 потолочного значения напряжения дения выполнен в виде регулируемого источникад на управляющий вход которого, как и на управляющий вход блока 20j подается сигнал с выхода датчика 22 напряжения источника возб- огаденияо Для сохранения этих свойств устройства при определенных значениях скольжения машину 1 двойного питания как отмечалось выше,, необходимо переводить в режим потребления реактивной мощности Аналоговый сигнал частоты сети со. и истинной скорости вращения ротора с выходов блока 8 преобразования паракетроь поступает на входы второго блока 26 сум1.1ирова ниЯэ форми руюце1 о сигнал л пропорцио- нальньй скольженшс Этот сигнал через блок 27. модуля скольжения,, выполненного напримерJ -в виде вентильного моста,- поступает на первый вход компаратора 28,, на второй вход которого поступа.ет сигнал с выхода задатчика 29 уровня скольженияе Если сигнал скольжения превысит сигнап задатчика 29 уровня то компаратор 28 через диод 30 сформирует сигнал требуемой полярности и вели чнны,,, поступающий на вход задатчика 12 реактивной мощности в качестве сих-нала новой уставки., обеспечивающего перевод машины 1 в режш4 потребления реактивной мощности. При возврате машины 1 в требуемый диапазон по скольжению сигнал новой уставки по реактивной мощности снрЕмается, и устанавливается режим в соответствии с задатчика- ми 12 и 15.
J
Блок 7 преобразованил координат осуществляет перемножение трех векторов - сигналов управления с, вьгг;одов
ни с
тт
35
40
з с
ж
регуляторов 14 и 17 CUiye ), сигнала вектора напряжения сети (Ue )
11 углового пололсек сигнала датч:ика
gQ п
eg ф
:
ния ротора (), а на выходе имеем сигнал:
з(,гГггГс- )
(2)
U-.uJcos(jjp--;f,-l +jsin(yp-yo-(,)
тт п
.Ue
тт tT
. е и-и, е
5
0
5
5
0
Блок В преобразования параметров режимаэ где осуществляется преобразование трехфазных сигналов соответствующих датчиков в двухфазные может бьп ь реализован, напримерj на базе стандартных блоков системы УБСР-,АИ или на базе трансформаторов.
Благодаря управлений, когда сигналы управления формируются с приоритетом, например, для управления скоростью вращения и моментом и напряжение возбуждения при этом не превышает потолочного значения, обеспечивается наиболее полное использование установленной мощности, тиристорного преобразователя частоты, в регулируемом режиме расвшряется диапазон скольжения путем перевода машины в режим потребления реактивной мощности , что повьшает эксплуатационную надежность устройства„ Последнее особенно важно на приводах собственных нулод электростанций, где зачастую нет проблемы реактивной мощности.
Предлагаемое устройство позволяет достичь заданного качества регулирования машины двойного питания без введения в систему регулирования элементов, формирующих компенсирующие связи, вследствие чего не требуется осуществления точной настройки указанных элементов и повьшается н адеж- ность системы управления машины двойного питания.
Формула изобретения
Устройство для управления машиной двойного питания, содержащее тирис- торный преобразователь частоты, выход которого через датчик тока ротора
предназначен для подключения к выводам роторн.ой обмотки машины двойного питания э питающий вход тиристорного преобразователя частоты подключен к вторичной обмотке согласующего трансформатора, первичная обмотка которого предназначена для подключения к источнику питания, управляющий вход тиристорного преобразователя частоты
подключен к выходу блока управления
11
тиристорным преобразователем частоты, вход которого подключен к выходу регулятора фазных токов ротора, первый вход которого подключен к датчику тока ротора, второй вход ре- гулятора фазных токов ротора подключен к выходу блока преобразования координат с четырьмя входами, два из которых соединены с первым и вторым выходами блока преобразования параметров режима, входы которого подключены соответственно к датчикам тока статора, напряжения статора и углового положения ротора, последовательно соединенные между собой задатчик реактивной мощности, первый и второй регуляторы реактивной мощности, третий и четвертый выходы блока преобразования параметров режима соединены
соответственно с вторыми входами первого и второго регуляторов реактивной мощности, последовательно соединенные между собой задатчик частоты вращения ротора, первый и второй регуляторы частоты вращения, второй вход второго регулятора частоты вращения соединен с пятым выходом блока преобразования параметров режима, шестой выход которого соединен с вторым входом первого регулятора частоты вращения, датчик напряжения источника возбуждения, отличающееся тем, что, с целью расширения диапазона регулирования частот вращения, в него введены два блока регулируемого ограничения, два блока суммирования, задатчик потолочного значения напряжения возбуждения, блок перемножения, блок извлечения корня квадратного, блок модуля скольжения, задатчик уровня скольжения.
Q g
0
5
I
д
5
0
1728
компаратор и два диода, выход второго регулятора реактивной мощности соединен с первым входом первого блока регулируемого ограничения, второй вход которого соединен с выходом блока извлечения корня квадратного, выход блока регулируемого ограничения соединен с третьим входом блока преобразования координат, выход, второго регулятора частоты вращения соединен с первым входом второго блока регулируемого ограничения, второй вход которого соединен с входом задатчика потолочного значения напряжения возбуждения и с выходом датчика напряжения источника возбуждения, выход второго блока регулируемого ограничения соединен с четвер- тЫхМ входом блока преобразования координат и с блоком перемножения, выход которого соединен с первым входом первого блока суммирования, второй вход которого соединен с выходом задатчика потолочного значения напряжения возбуждения, выход первого блока суммирования через первый диод соединен с входом блока извлечения корня квадратного, седьмой въкод блока преобразования параметров режима соединен с первым входом вторсг-о блока суммирования, второй вход которого соединен с вторым входом первого регулятора частоты вращения, выход второго блока суммирования соединен с входом блока модуля скольжения, выход которого соединен с первым входом компаратора, второй вход которого подключен к выходу задатчика уровня скольжения, выход компаратора через второй диод подключен к входу задатчика реактивной мощности.
Редактор А,Маковская
Составитель Е.Перемыслбва
Техред Л.Сердюкова Корректор А.Зимокосов
Заказ 5808/52Тираж 659
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб.,.До 4/5
Производственно-полиграфическое предприятие, г. Ужгород, ул. Проектная, 4
Подписное
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для связи двух энерго-СиСТЕМ | 1979 |
|
SU817854A1 |
| Устройство для связи двух энергосистем | 1978 |
|
SU771796A1 |
| Агрегат бесперебойного электроснабжения | 1990 |
|
SU1739439A1 |
| Агрегат бесперебойного электроснабжения | 1988 |
|
SU1658281A1 |
| Устройство для управления асинхронизированной синхронной машиной | 1980 |
|
SU877765A1 |
| Устройство для связи двух энергосистем | 1986 |
|
SU1427478A1 |
| Устройство для связи двух энергосистем | 1983 |
|
SU1142874A1 |
| Электропривод с асинхронной машиной с фазным ротором | 1975 |
|
SU610275A1 |
| Система бесперебойного электроснабжения | 1989 |
|
SU1677778A1 |
| Способ управления бесщеточной синхронной машиной | 1988 |
|
SU1624657A2 |
Изобретение относится к электротехнике и может быть использовано в электроприводах нужд электростанций. Целью изобретения является расширение диапазона регулирования частоты вращения. Цель достигается благодаря управлению, при котором сигналы управления формируются с приоритетом для управления скорости вращения и момента, и напряжение возбуждения при этом не превьшает потолочное значение, обеспечивается наиболее полное использование установленной мощности тиристорного преобразователя частоты, в регулируемом расширяется диапазон скольжения путем перевода машины в режим потребления реактивной мощности. Устройство позволяет достичь заданного качества регулирования машины двойного питания без введения в систему регулирования элементов, формирующих компенсирующие зи, вследствие чего не требуется осуществления точной настройки указанных элементов и повьшается надежность системы управления машины двойного питания. 1 ил. Г- «ЕЯЮ СО О1 О5 hnad tN5
| Устройство управления электроприводом переменного тока | 1976 |
|
SU657558A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод переменного тока | 1979 |
|
SU836750A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
