(54) САМОХОДНЫЙ ДОЖДЕВАЛЬНЫЙ ТРУБОПРОВОД
| название | год | авторы | номер документа |
|---|---|---|---|
| Самоходная многоопорная оросительная машина | 1983 |
|
SU1147292A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ | 2012 |
|
RU2496304C1 |
| Устройство для измерения размера разгрузочной щели конусной дробилки | 1977 |
|
SU733725A1 |
| ПОРШНЕВОЙ ГАЙКОВЕРТ | 2010 |
|
RU2444429C1 |
| МЕХАНИЗМ РЕГУЛИРОВАНИЯ ПОДБАРАБАНЬЯ ЗЕРНОУБОРОЧНОГО КОМБАЙНА | 2023 |
|
RU2817244C1 |
| Гидравлический толкатель вагонеток | 1977 |
|
SU1033775A1 |
| Устройство для нанесения клея на кромки обувных деталей | 1988 |
|
SU1574202A1 |
| САМОХОДНАЯ СИСТЕМА ДЛЯ РЕМОНТА ПОДЗЕМНОГО ТРУБОПРОВОДА | 2000 |
|
RU2198336C2 |
| ПРИВОД УГОЛЬНОЙ ПИЛЫ | 1992 |
|
RU2065044C1 |
| Сельскохозяйственная машина для уборки гороха | 1976 |
|
SU884548A3 |
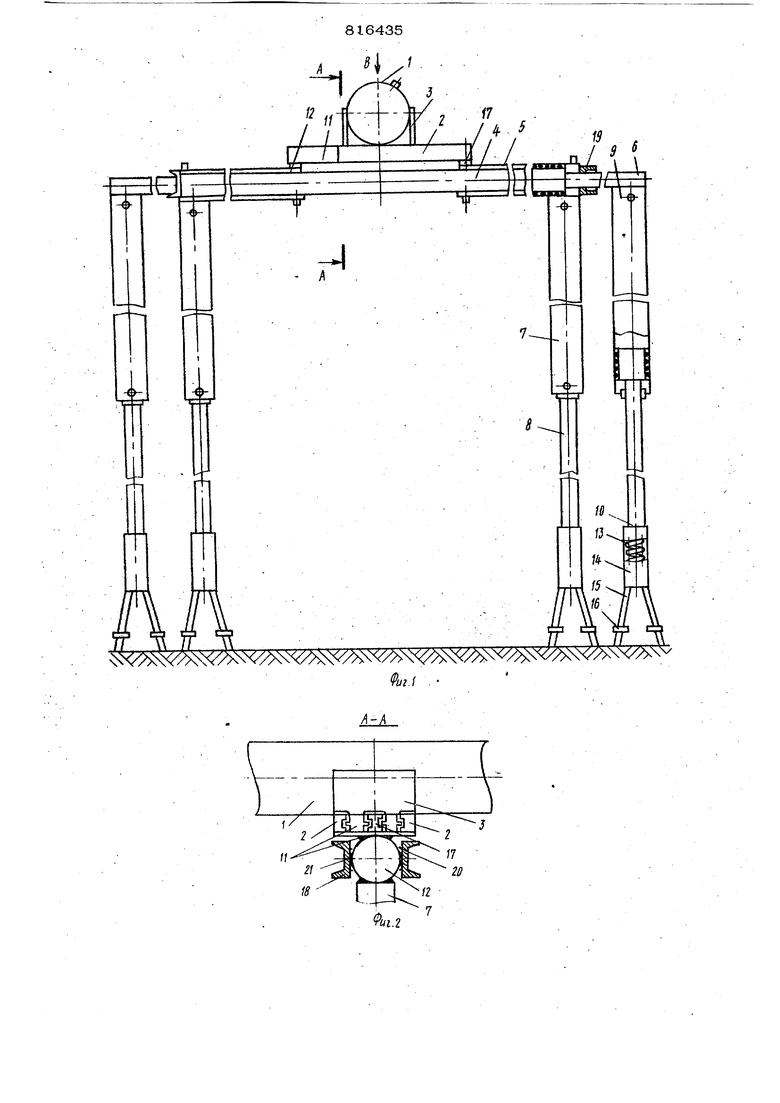
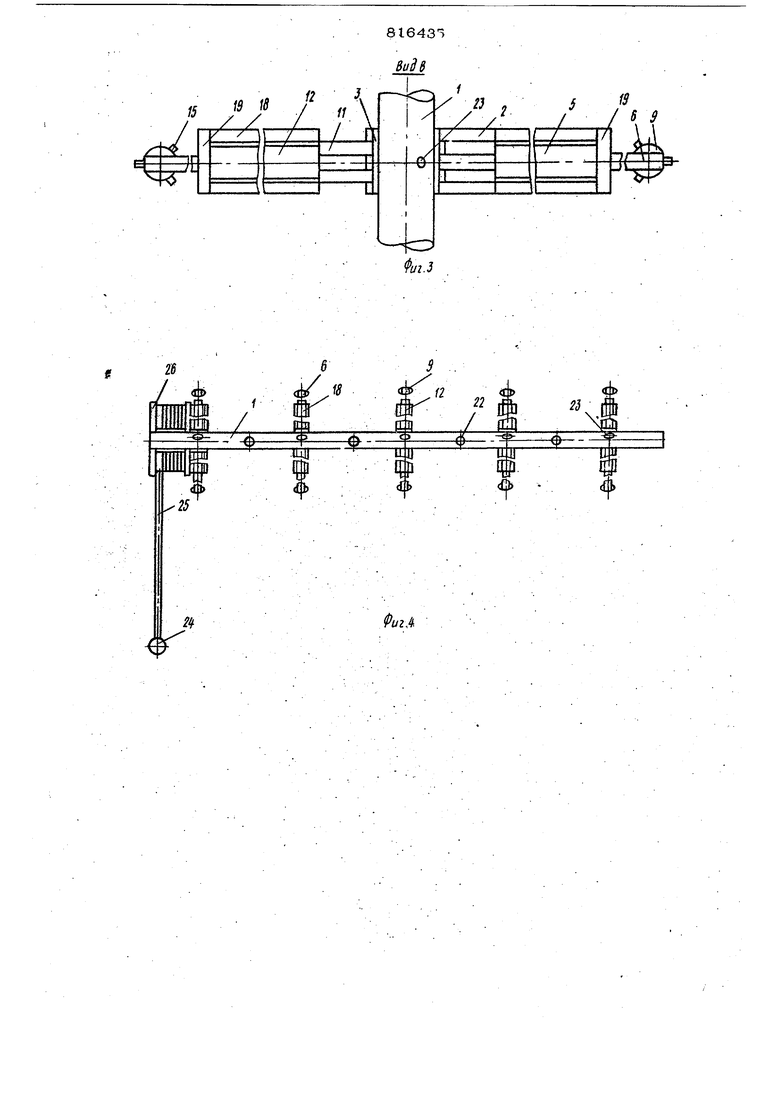
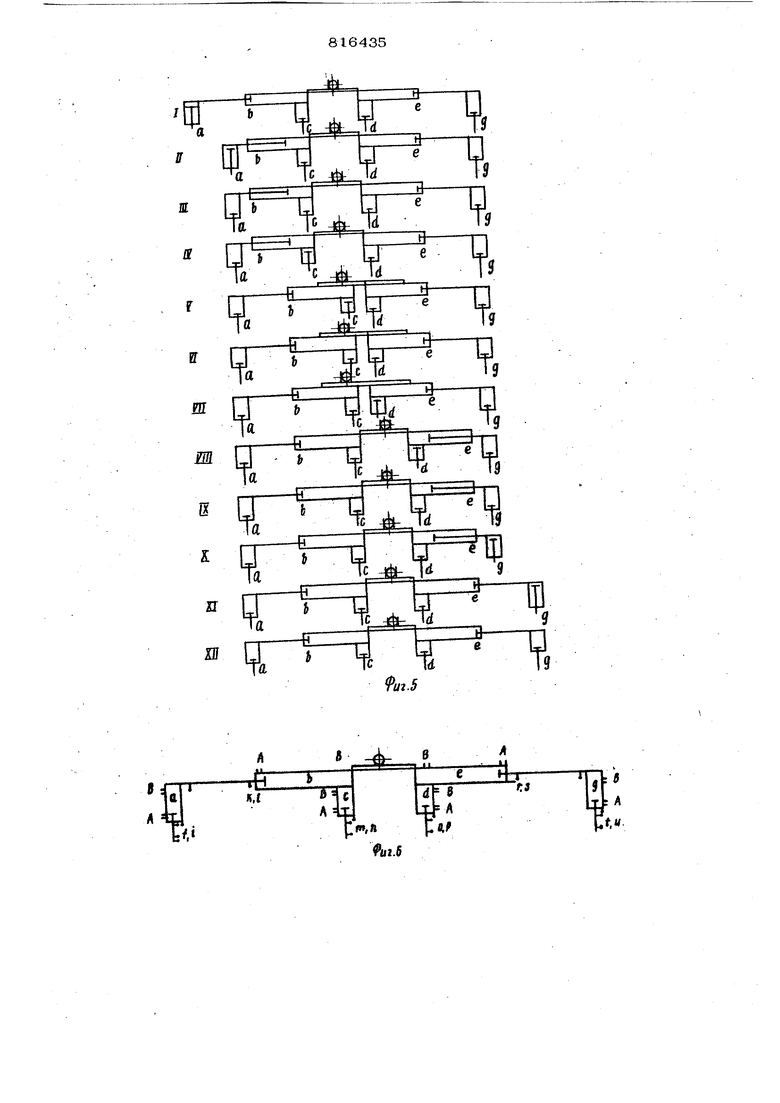
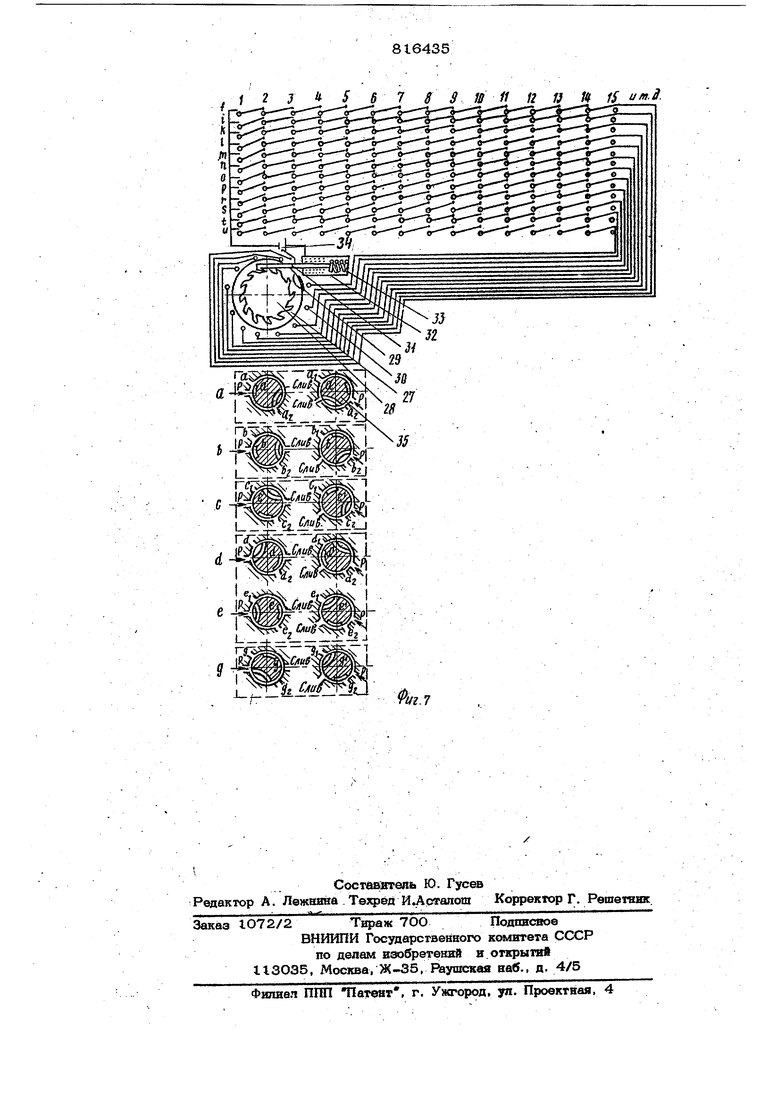
Изобретение относится к сельскому хозяйству; в частности .к механизации орошения, и может быть использовано в многоопорных самоходных дождевальных и поливных машинах, работающих как зиЕИрнно, гакHjBнепрерывном движении. Известен дождевальный т|рубопровод, включающий балки с шагающей опорой Недостатком известного устройства является то, что механизм перемещения опор расположен на балках и занимает значительное место, что увеличивает габаритные размеры устройства в целом. Цель изобретения - уменьшение габарвтвых размеров устройства. Поставленная цель достигаетсй тем, что щагающая опора выполнена в вше двух частей, каждая из которых вклк чает горизонтальный силовой авлшшр| причем шшиндры телескопически свезены друг с другом. Кроме того к корпусам в штокам каждого горизонтального силового цилиндра прикреплены вертикальные опорные силовые цилиндры. На фиг. I изображен предлагаемый трубопровод, вид сбоку; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - вид В да фиг. 1; на фиг. 4 - трубопровод, вдц сверху; на фиг. В - кинематическая схема перемещения трубопровода на один шаг; на фиг. 6 - размещение контактов иа штоках и на корпусах цилиндров; на фиг. 7 - схема автоматики, обеспечивающей перемещение трубопровода. Самоходный дождевальный трубопровод содерашт собственно трубопровод t, установленный На шагающей опоре, которая в.свою очередь, состоит их двух частей - части несущей трубопровод I и части без трубопровода. Часть опоры, несущая трубопровод, имеет вилку 2, состоящую из трех щтьфей, с которыми :Соединены две вертикальные стойки 3, удерживающие трубопровод I в горизонтальный силовой цилиндр 4, включаю вещи корпус 5 и шток 6 цилиндра. К го{)изонтальному риловому цилиндру 4 прикреплены два опорных силовых цилинд:ра, ChHHf состоящий из корпуса 7 и штока 8, прикреплен к корпусу 5 цилиндра 4 а другой, состоящий из корпуса 9 И штока 10, - к штоку 6 цилиндра 4, Часть опоры без трубопровода имеет вилку II состоящую из двух штьфей, и ;горизонтальный силовой цилиндр 12, к которому также прикреплены два опорных силовых аипиндра. В нижней части штоков, опорных силовых цилиндров ш еются пружины t3, раэмашенные в кожухах 14, к KOTOpi vf подсоединены опорные штыри 15 с шайбами 16. Штыря вилки 11 опоры без трубопровода входят во впадины шты. рей вилки 2 другой части опоры, а вилки соединены с горизонтальными силовыми Ииоиндрами 4 к 12 посредством пластин Д7. Горизонтальные силовые цилинд.ры 4 и 12 обеих частей опоры смонтированы в раме, состоящей из двух продольных 18 и двух поперечных 19 швеллеров. Продольные швеллеры 18 имеют с внутренней стороны пагзы 20, в которых пере мещаются выступы 21, имеющие .;я на корпусах цилиндров 4 и 12, На каждом корпусе цилиндра (горизонтальном и опорном) имеется по два штуцера для подвода и слива рабочей жидкости. На трубопроводе I между опорами имеются штуцеры 22 для подсоединения дождевальных аппаратов, а над опорами штуцеры 23 для отбора воды из цилиндров. Вода для полива подводится к трубопроводу 1 от гидранта 24 через гибкий шланг 25, намотанный на барабан 26. Механизм, обеспечивающий автоматическое перемещение трубопровода, состои из барабана 27, соединенного с храповы колесом 28, имеющим двенадцать зубьев На барабане 27 установлена контактная пластина 29, которая при повороте барат ,баца на один зуб храпового колеса соеди няется поочередно с нормально разомкнутыми контактами 30 Поворот хра.пового колёса 28 на один зуб осуществляется собачкой 31, которая втягивается соленоидом 32. На. стержень собачки 31 с горца воздействует пружина 33v Соленоид 32 подключен к источнику тока 34, один выход которого соединяется с контактами 30, а другой - с нормально разомкнутыми.контактами, установлен ными на горизонтальных и опорных силовых цилиндрах. На оси барабана 27 установлен переключатель, состоящий из шести парных блоков распределителя 35 аждый ИЗ которых обслуживает свой сиовой шшиндр. Такие механизмы устаовлены на каждой опоре, причем источик тока на весь дождевальный трубопроод один. Самоходный дождевальный трубопроод работает следующим образом. В исходном положении щтоки 8 и 10 опорных силовых цилиндров и штоки 6 горизонтальных силовых цилиндров выдвинуты. Двухштыревая 11 и трехщтьфевая 2 вилки обеих частей опоры раздвинуты. Перемещение всех опор с трубопроводом происходит за двенадцать one- рашЕЙ. Вода под давлением из штуцера 23 поступает к блокам распределителя 35. В начальный момент блок распределителя Ct.Ha всех опорах трубощзовода пропускает воду под давлением к штуцеру А цилиндра а, , ,а штуцер В цилиндра Ct сообщается со сливом (фиг. 6 и 7). При этом шток силового цилиндра йина всех опорах втягивается в корпус цилиндра и в конце хода штока замыкаются контат ты I и i, на всех опорах трубопровода. Цепь соленоида 32 замыкается, стержень собачки 31 втягивается , поворачивая на один зуб храповое колесо 28, а вместе с ним и барабан 27. Контактная пластина 29 соприкасется со следующим контактом ЗО. Вместе с барабаном на 1/12 ч. оборота повора/ чивается блок растфеделителя 35, который сообщает А цилиндра о с напорной магистралью, при этом штуцер В цилиндра Ь сообщается со сливом. При этом шток силового цилннлра Ь на всех опорах втягивается и вместе с ним перемещается на ведичнну хода штока силового цилиндра b опорный силовой цилиндр Л на всех опорах. В конйе хода штока замыкаются контакты К и е на всех опорах и снова замыкается цепь сопеноида, а собачка поворачивает храповое колесо на один зуб. Таким же образом осуществляются все двенадцать операций, з.атем цикл повторяется. Если во время какой-либо операции шток какой - то из опор не втянется (или не выдвинется), то не сработают соответствукнцие контакты, цепь соленоида не замкнется, барабан не провернет блок распредепителя н подачи воды под давлением к следующему цилиндру не произойдет, а перемещение опор 1.прекратится. Кинематическая схема перемещения трубопровода на один шаг включает
следующую последовательность операций (фиг. 5): I втягивается шток цилиндра а ; II - втягивается шток цилиндра D и вместе с ним на ход штока перемешается цилиндр О ; 1П выдвигается шток цилиндра Q ;|М втягивается шток цилиндра С } V выдвигается вправо корпус цилиндра bi при этом двухштыревая вилка бес трубопроводно части опоры вдвигается во .впадины трехштыревой вилки другой части опор, сн ловой цилиндр с перемешается на один шаг; VI - выдвигается шток цилиндра С ; V|l - втягивается шшиндРв А; VUI - перемещается вправо кор пус цилиндра 6 ,. перемш1ая на величину хода трубопровод, при этом штыри трехштьфевой вилки части опоры с трубопроводом выдвигаются из впадин двухштыревой вилки другой части опоры, силовой цилиндр пер@м1ешается вправо на один шаг; IX - шток цилиндра ct выдвигается; Х - шток цилиндра б втягивается; XI - выдвигается шток цилиндра Q и вместе с ним перемоцается цилиндр р; ХП - выдвш ается шток цилиндра .°
Система возвращается в исходное положение и далее операции повторяются.
Установка жиклеров с определеннь м диаметром проходного сечения внутри штуцеров 23 позволяет в широком диапазоне регулировать скорость движения трубопровода.
Формула изобретен и, я
1-. Самоходный доящевальный трубопровод, включающий балкн с шагающей опорой, отличающи И с я тем, что., с целью уменьшения габаритных размеров, шагающая олора выполнена
в вдде двух частей, каждая из которых включает горизонтальный сяповой оили шр, причем шшшщры телескопически связаны друг с другом.,
Источники информации,
принятые во внимание при экспертизе I. Авторское свидетельство СССР
№ 523830, кл. А О1 q 25/О9, 1973.
м.
«j .
i8
Ш
/
J4.
ад
(
;j
и
22
jsa
U-U
21
%ZJ
