(54) МЕХАНИЗМ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗА
| название | год | авторы | номер документа |
|---|---|---|---|
| МЕХАНИЗМ ВЕРТИКАЛЬНОГО ПЕРЕМЕЩЕНИЯ ГРУЗА | 1971 |
|
SU433098A1 |
| Домкрат | 1991 |
|
SU1781163A1 |
| Подъемные подмости | 1980 |
|
SU903526A1 |
| УСТРОЙСТВО для СИГНАЛИЗАЦИИ О СТЕПЕНИ ИЗНОСА РЕЗЬБЫ В ГРУЗОВОЙ ГАЙКЕ ВИНТОВЫХ МЕХАНИЗМОВ | 1971 |
|
SU302310A1 |
| УНИВЕРСАЛЬНЫЙ ПРИВОД ПЛАШЕЧНОГО ПРЕВЕНТОРА | 1993 |
|
RU2085701C1 |
| Устройство для захвата и сброса грузов | 1987 |
|
SU1523524A1 |
| УСТРОЙСТВО ДЛЯ ЗАМЕРА БОКОВОГО ЗАЗОРА ШЛИЦЕВОГО СОЕДИНЕНИЯ | 2016 |
|
RU2630292C1 |
| СТЕНД ДЛЯ ИСПЫТАНИЯ ЗАЩИТНОГО УСТРОЙСТВА СИСТЕМЫ ВЕНТИЛЯЦИИ | 2007 |
|
RU2353860C1 |
| ПОДЪЕМНОЕ ВИНТОВОЕ УСТРОЙСТВО | 2022 |
|
RU2797849C1 |
| ВЗВЕШИВАЮЩЕЕ УСТРОЙСТВО НА ТРАНСПОРТНОМ СРЕДСТВЕ | 1993 |
|
RU2091723C1 |
I
Изобретение относится к механизмам для подъема грузов на заданный уровень с механическим приводом, например домкраты, и может найти применение в промышленности при подъеме разнообразных грузов.
По основному авт. св. № 433О98 известен механизм вертикального груза, содержащий нагруженный винт с грузовой гайкой, установленные в корпусе на подшипниках, и ловитель, выполненный в виде гайки с заплечиками, установленной на нагруженном винте под грузовой гайкой, и снабженной торцовыми шлицами, сопрягающимися со шлицами грузовой гайки, при этом корпус выполнен с уступом, удерживающим гайку с заплечиками в корпусе l.
Недостатком известного механизма $шляется отсутствие индикашга износа резьбы грузово гайки выше допустимой величины.
Известное устройство срабатывает лишь при полном износе резьбы гайки, .
приводящем к провалу нагруженного винта на грузовой гайке. Однако, доводить , механизм до такого состояния (критического) нецелесообразно. Грузовую гайку необходимо менять как только вьфаботка резьбы гайки достигнет предельно допустимой величины.
Цель изобретения - повышение безопасности путем индикации максимально допустимой величины выработки резьбы грузовой гайки.
Для достижения цели гайка ловителя и грузовая гайка расположены друг относительно друга таким образом, что высота площадки соприкосновения вертикальных граней шлицов равна максимально допустимой величине выработки резьбы грузовой гайки, а под гайкой ловителя в корпусе установлен микропереключатель , взаимодействующий с гайкой и включаемый в систему аварийной сигнализации.
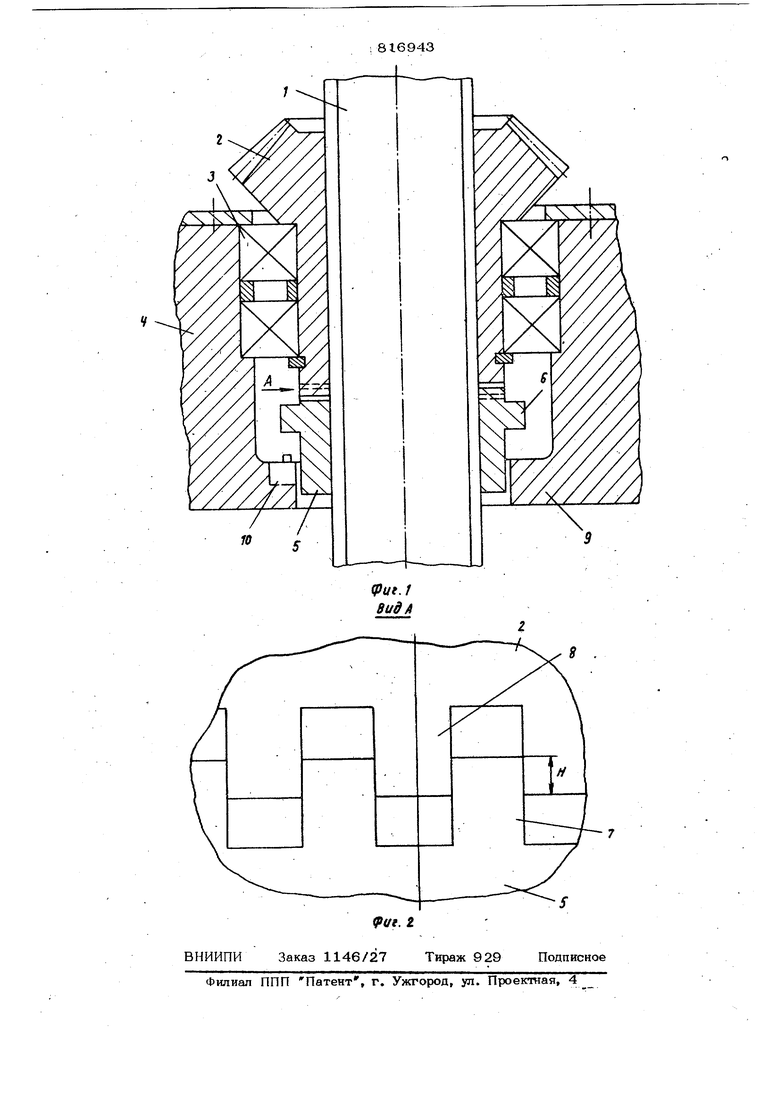
На фиг. I схематически изображен механизм вертикального перемещения
груза, разрез; на фиг. 2 - виц по сгрепке А на фиг. I.
Нагруженн .„ винг I механизма подъема груза сопряжен с грузовой гайкой 2, упираюшейся и на радиапьно-упорные подшипники а, .размещенные в корпусе 4. На нагруженном винте I под гайкой 2 установлен ловитель, выполненный в виде гайки 5 с заплечиками 6, снабженной торцовыми шлицами 7. Шлицы 7 сопрягаются со шлицами 8 грузовой гайки 2. Корпус выполнен с уступом 9, в Корпусе под гайкой 5 установлен микропереключатель Ю. Гайки 2 и 5 расположены так друг относительно друга, что высота площадки соприкосновения вертикальных граней шлицов 7 и 8 равна Н, максимально допустимой высоте вьфаботки резьбы грузовой; гайки 2.
Механизм работает следующим образом.
При достижении износа резьбы гайки 2 максимально допустимой величины Н шлицы гайки 5 полностью выходят из соприкосновения с гайкой 2. При этом гайка 5 находится на нагруженном винте I. При движении винта I вниз гайка 5 движется вниз вместе с ним, теперь она не имеет связи с гайкой 2, Передававшей ей через шлицы 7 и 8 вращение. По достижении гайкой 5 уступа 9 она нажимает на шток микропереключателя 10, который выключает привод механи 1 а и включает систему сиигнализации об .аварийной остановке.
В случае аварийного срыва резьбы гайки 2 удержание нагруженного винта
происходит за счет упирания заплечиков 6 гайки 5 в уступ 9, т.е. как и в известном механизме.
Изобретение позволяет улучшить работу механизма вертикального перемещения груза за счет индикации максимально допустимого износа резьбы rpvзонесущей гайки и, тем самым, повышения надежности работы механизма.
Формула изобретения
Механизм вертикального перемещения груза по авт. св. № 433О98, отличающийся тем, что, с целью повышения безопасности путем индикации максимально допустимой величины выработки резьбы грузовой гайки, гайка Ловителя и грузовая гайка расположены друг относительно друга таким образом, что высота площадки соприкосновения вертикальных граней шлицов равна максимально допустимой величине вьфаботки резьбы грузовой гайки, а под гайкой ловителя в корпусе установлен микропереключатель, взаимодействующий с .гайкой и включаемый в систему аварийной сигнализации.
Источники информации, принятые во внимание при экспертизе
I. Авторское свидетельство СССР № 433098, кл. В 66 F 1/06, 1972 (прототип).
