(21)4322903/АО-11
(22)17.09,87
(46)23.11.89, Бюл. W 43
(72)А.В,Чёмерис, 0,И,ГолЫнчик,
А,Ф.Быстров и З.А.Быкова
(53)621.86.061 (088,8)
(56)Патент Японии N 60186385, 1985.
(54)УСТРОЙСТВО ДЛЯ ЗАХВАТА И СБРОСА ГРУЗОВ .
(57)Изобретение относится к грузоподъемным устройствам и может быть истгользовано для захвата, подъема и последующего сброса изделий с заранее заданной высоты. Цель изобретения - уменьшение энергозатрат и упрощение конструкции при использовании грузоподъемных средств с полиспастами. Устройство содержит корпус с механизмами настройки и срабатывания захватных органов от привода грузоподъемных средств с полиспастами. Привод срабатывания захватных органов осуществляется от подвижных блоков полиспаста через управляемую кинематическую связь, позволяюп1ую произвести предварительную настройку захватных органов на определенную высоту сбрасьшания. Благодаря использованию единого механизма для подъема груза и управления захватными органами упрощается конструкция и снижаются энергозатраты, 3 з,п,ф-лы, 2 ил.
S
| название | год | авторы | номер документа |
|---|---|---|---|
| Грузозахватное устройство | 1986 |
|
SU1341142A1 |
| Захватное устройство для грузов с отверстиями | 1983 |
|
SU1119966A1 |
| Захватное устройство для грузов с отверстиями | 1984 |
|
SU1293093A1 |
| Захватное устройство для изделий с фигурной головкой | 1981 |
|
SU1006358A1 |
| ТРАВЕРСА | 2008 |
|
RU2385282C1 |
| ГРУППОВОЕ ЗАХВАТНОЕ УСТРОЙСТВО | 1999 |
|
RU2170698C1 |
| ИСПОЛНИТЕЛЬНЫЙ МЕХАНИЗМ ЗАХВАТНОГО УСТРОЙСТВА | 1993 |
|
RU2035292C1 |
| Захватное устройство для раскрывающейся тары | 1988 |
|
SU1654226A1 |
| Траверса для консольного подъема и транспортировки грузов | 1983 |
|
SU1172858A1 |
| Гидравлический копер для вытрамбовывания котлованов в грунте | 1989 |
|
SU1715977A1 |

Изобретение относится к грузоподъемным устройствам и может быть использовано для захвата, подъема и последующего сброса изделий с заранее заданной высоты. Цель изобретения - уменьшение энергозатрат и упрощение конструкции при использовании грузоподъемных средств с полиспастами. Устройство содержит корпус с механизмами настройки и срабатывания захватных органов от привода грузоподъемных средств с полиспастами. Привод срабатывания захватных органов осуществляется от подвижных блоков полиспаста через управляемую кинематическую связь, позволяющую произвести предварительную настройку захватных органов на определенную высоту сбрасывания. Благодаря использованию единого механизма для подъема груза и управления захватными органами упрощается конструкция и снижаются энергозатраты. 3 з.п. ф-лы, 2 ил.
Изобретение относится к грузоподъемным устройствам и может быть использовано для захвата, подъема и последующего сброса изделий с заранее заданной высоты.
Целью изобретения является уменьшение энергозатрат и упрощение кон- . струкции при использовании грузоподъемных средств с полиспастами.
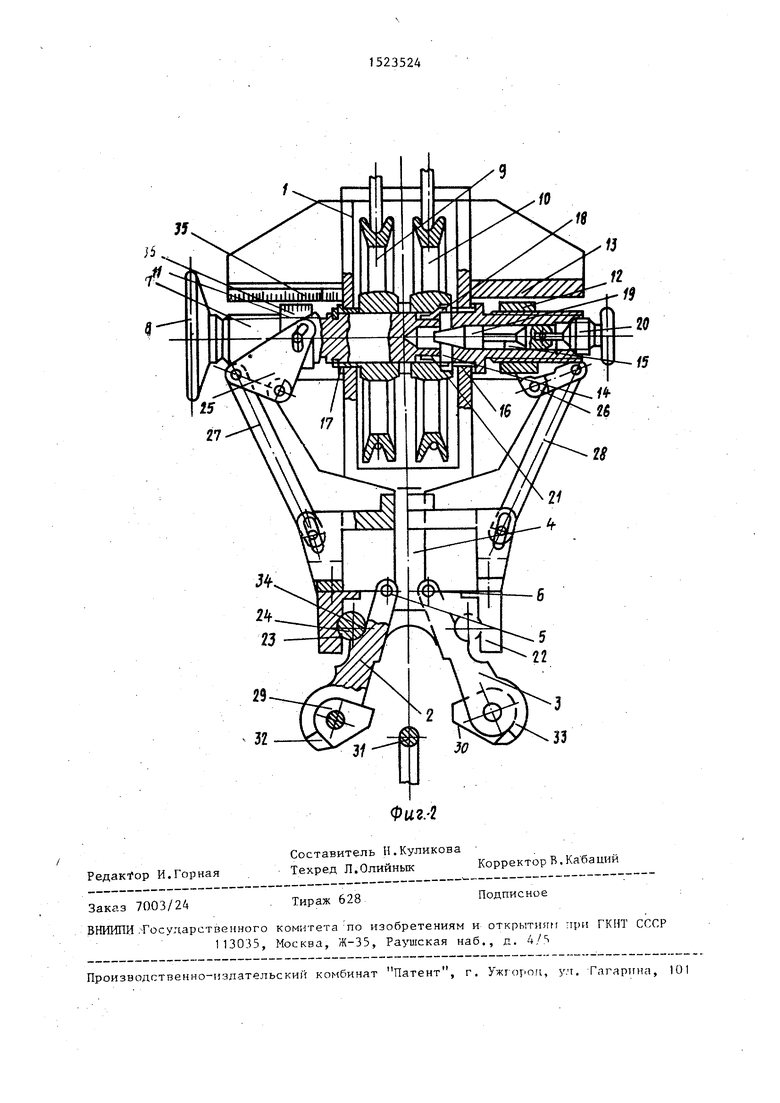
На фиг.1 изображено предлагаемое устройство в процессе подъема изделия, общий вид; на фиг.2 - то же, в момент сбрасывания изделия.
Устройство содержит корпус 1, ко- торьй несет узел настройки поворотных захватных органов. 2 и 3, закрепленных на вертикальной направляющей 4 корпуса 1 при помощи осей 5 и 6, включающий горизонтальную вращающуюся
штангу 7 с воротком 8, снабженную на своем центральном участке парой подвижных блоков 9 и 10 полиспаста, по обеим концам которой выполнены резьбы разного направления и размещены гайки Пи 12, взаимодействуюп(ие с горизонтальными направляющими 13 корпуса 1. Горизонтальная вращающаяся штанга 7 выполнена с сообщающимися радиальньми 14 и осевым 15 канг1,пам1, опирается на подшипники 16 и 17, л- ,крепленные в корпусе J, и соединена через управляемую кинематическую связь с приводом поворота через Опок 10 полиспаста. Управляемая кинемлти- ч- .как связь штанги 7 с приводом поворота через блок 10 полиспаста сп- держит встроенные в ее радиаль)ые каналы 14 подпружиненные щпонки 18,
Ю
ю 4
кинематически связанные с коническим наконечником 19 винты 20, закрепленные в осевом канале 15 штанги 7. На посадочной поверхности блока 10 полиспаста для подпружиненных шпонок 18 вьтолнены шлицы 21,
Поворотные захватные органы 2 и 3 дополнительно снабжены спусковым механизмом срабатьгаан1|я последних, который кинематически связан с гайками 11 и 12 узла настройки поворотных захватных органов 2 и 3 и включают подвижную обойму 22 с пазами 23 на внутренней поверхности, установленную на вертикальной направляющей 4 корпуса 1, и ролики 24, размещенные между ее внутренней поверхностью и поворотными захватными органами 2 и 3,
.Кинематическая связь механизма срабатывания поворотных захватных органов 2 и 3 с гайками 11 и 12 выполнена в виде поворотных кронштейнов 25 и 26 и тяг 27 и 28, которые соединяют последние с подвижной обоймой 22. Поворотные захватные органы 2 и 3 вьшолнены в виде симметричных смыкающихся крюков, на концах которых установлены поворотные упоры 29 и 30 со скошенными внутренними поверхностями, на которые опирается грузовая скоба 31 изделия. На симметричных смыкакщихся крюках выполнены заплечики 32 и 33, ограничивающие поворот упоров 29 и 30, и выступы 34 для фиксации роликов 24 от выскальзывания. Узел настройки захватных органов 2 и 3 снабжен дополнительно шкальн.ыми планками 35, которые закреплены на гайках 11 и 12 и на горизонтальных направляющих 13.
Устройство работает следующим образом.
Вращением винта 20 отводят в сторону конический наконечник 19, под действием пружин шпонки 18 выходят из зацепления со шпицами 21 блока 10 полиспаста грузоподъемного средства. Вращением штанги 7 при помощи воротка 8 по шкальным планкам 35 устанавливают гайки 11 и 12.на необходимую высоту сбрасывания изделия. Вращение винта 20 перемещают конический наконечник 19, который, выжимая шпонки 18, вводит их обратно в зацепление со шлицами 21 блока 10 полиспаста. Подвижная обойма 22 и захватные органы 2 и 3 находятся в крайнем нижнем положении (фиг.1), и цоворотные
0
5
0
5
0
5
0
5
0
5
упоры 29 и 30, опираясь на заплечики . 32 и 33, фиксируют грузовую .скобу 31 . Грузовую скобу 31 изделия при загрузке продвигают через упоры 29 и 30, которые могут поворачиваться вверх и которые после прохождения скобы 31 под действием собственного веса возвращаются в исходное положение. Дальнейший их поворот не возможен из-за имеюш;ихся заплечиков 32 и 33. После этого изделие поднимают. Во время подъема изделия вращаются блоки 9 и 10 полиспаста, причем блок 10, находящийся в зацеплении со штангой 7, вращает ее и перемещает тем самым вдоль нее гайки 11 и 12, которые взаимодействуют с горизонтальной направляющей 13 корпуса 1, кронштейнами 25 и 26, тягами 27 и 28 и подвижной обоймой 22. Пр1И достижении заданной высоты подъема груза гайки 11 и 12 успевают переместиться, повернуть кронштейны 25 и 26 и через тяги 27 и 28 подтянуть вверх обойму 22 захватных органов 2 и 3. В процессе этого ролики 24, зажатые под действием веса изделия между поверхностями обоймы 22 и крюков, перекатываются и западают в пазы 23 на внутренней поверхности обоймы 22. Одновременно за счет наличия скошенных поверхностей на упорах 29 и 30 изделие, благодаря своему весу, раздвигает крюки и вьшадает (фиг«2).
В устройстве для захвата и сброса грузов имеется единый механизм привода захватных органов и настройки на необходимую высоту сбрасывания, который через сцепление связан с механизмом привода, причем в качестве последнего используется грузоподъемный механизм с блоками полиспаста. Это позволяет упростить конструкцию за счет исключения необходимости использования автономного привода и сократить энергозатраты.
Снабжение устройства шкальными планками 35 позволяет повысить точность настройки устройства на необходимую высоту сбрасывания.
Формула изобретения
1, Устройство для захвата и сброса грузов, содержащее корпус, поворотные захватные органы, узел настройки последних, включанлций размещенную на корпусе приводную горизонтальную штангу, по обеим концам которой выполнены резьбы разного направления и размещены гайки, взаимодействующие с горизонтальньмк направляющими корпуса, управляемую кинематическую связь горизонтальной штанги с приводом ее поворота, отличающееся тем, что, с целью снижения энергозатрат и упрощения конструкции при использовании грузоподъемных средств с полиспастами, привод горизонтальной штанги включает в себя пару подвижных блоков полиспаста, расположенную на центральном участке горизонтальной штанги, при зтом устройство снабжено спусковым механизмом срабатьшания захватных органов, кинематически связанным с гайками узла настройки захватных органов.
}J
5
0
5
0
5
канале горизонтальной штанги, и встроенные в радиальные каналы штанги подпружиненные относительно нее шпонки, кинематически связанные с коническим наконечником винта, при этом на посадочной поверхности каждого блока полиспаста выполнены щпицы для подпружиненных шпонок.
IS
п
П
}J
3S
15
