(54) ГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД
1
Изобретение относится к гидравлическим следящим приводам и может быть использовано в приводах различных машнн и автоматов, например, в промышленных роботах.
Известен гидравлический следящий привод, содержащий задающее устройство, следящий распределитель, связанный уст-ройством отрицательной обратной связи с исполнительным гидродвигателем, и устройство дополнительной обратной связи по нагрузке па исполнительном гидродвкгателс 1.
Недостатками такого привода являются сложность конструкции и низкое быстродействие вследствие наличия подпора на сливе.
Целью изобретения является повыщение быстродействия и упрощение конструкции.
Указанная цель достигается тем, что устройство дополнительной обратной связи выполнено в виде двухщелевого золот 1ика, расположенного в гильзе с образованием торцовых камер, поджатого с торцов регулируемыми пружинами и снабженного внутренними каналами для подачи рабочей жидкости из торцовых камер, подключенных к полостям гидродвигателя.
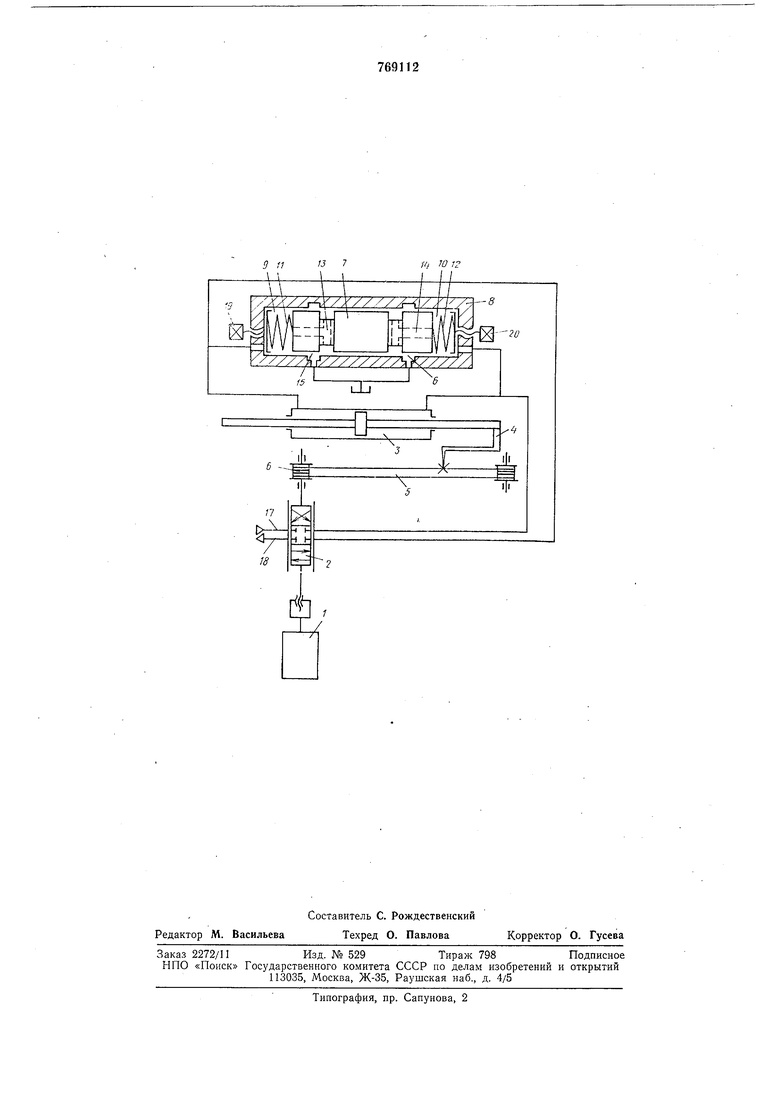
На чертеже изображен гидравлический следящий привод.
Привод содержит задающее устройство, например шаговый электродвигатель 1 с 5 винтовым преобразователем, соединенное со следящим распределителем 2, связанным с исполнительным гидродвигателем 3 устройства отрицательной обратной связи 4 через трос 5, намотанный на барабан 6, и 10 устройство дополнительной обратной связи в виде двухщелевого золотника 7, расположенного в гильзе 8 с образованием торцовых камер 9 и 10, поджатого с торцов рег5 1ируемыми пружинами 11 и 12, и име15 внутренние каналы 13 и 14 для подачи рабочей жидкости к дросселирующим щелям 15 и 16.
По гидролинии 17 к следящему распределению 2 подводится рабочая жидкость, а 20 по гидролинии 18 осуществляется слив.
Регулирование усилия нружин И и 12 производится с помощью винтов 19 и 20.
Привод работает следующим образом.
Шаговый электродвигатель 1 через винтовой преобразователь смещает золотник следящего распределителя 2. Если жидкость под давлением поступит, например, в правую полость гидродвигателя 3, а левая
полость соединится со сливом, произойдет персраспрсделенпе давлений R полостях гидродвигателя 3 и его поршень начнет двигаться влево по чертежу.
Перераспределение давлений произойдет и под торцами золотника 7 в камерах 9 и 10. Золотник 7 сместится влево, сжимая пружину 11. Величина этого смещения будет пропорциональна перепаду под торцами золотника 7. Смещение золотника 7 влево приведет к тому, что камера 9, а следовательно, и соответствующая полость гидродвигателя 3, соединится через каиал 13 в золотнике 7 и дросселирующую щель 15 со сливом. Это приведет к дополнительному цаденню давления в сливной полости гидродвигателя 3, а следовательно, к более интенсивному разгону порщня гидродвигателя. При становившемся движении поршня гидродвигателя на нем будет перенад, пропорциональный нагрузке. На пропорциональную нагрузке величину будет смещен и золотник 7. При внезапном изменении нагрузки на поршне гидродвигателя 3, например при ее увеличении, повысится давление в камере 10. Это приведет к дополнительному смещению золотника 7 влево и к увеличению слива через щель 15 из левой полости гидродвигателя. В результате перепад на поршне быстро увеличится на величину, необходимую для преодоления нагрузки и восстановления скорости установившегося движения привода.
Аналогично будет работать привод и при внезапном уменьщении нагрузки на поршне гидродвнгателя. При прекращении поступления входного задающего сигнала шаговый электродвигатель остановится.
Поршень гидродвигателя 3, продолжая свое движение и будучи жестко связан с тросом 5 отрицательной обратной связи, вращает барабан обратной связи 6 н возвращает следящий распределитель 2 в нейтральное положение. При этом в сливной полости гидродвигателя 3, а следовательно, и в камере 9, давление возрастает, а в нолости, связанной с нагнетанием, и в камере 10 начинает падать. Это приведет к возвращению золотника 7 в исходное положение п к уменьшению открытия щели 15.
В результате гидродвигатель будет интенсивно тормозиться. Аналогично привод будет работать при смещении золотника следящего распределителя 2 в другую сторону. Коэффициент дополнительной обратной связи можно регулировать путем изменения жесткости установочных 11 и 12 с помощью винтов 19 и 20.
Таким образом, действие дополнительной обратной связи осуществляется за счет изменения сопротивлений дросселирующих щелей, подключенных параллельпо сливной дросселирующей щели следящего распределителя. При этом не требуется искусственно создаваемого нодпора на сливе и, следовательно, повыщается быстродействие привода и упрощается его конструкция.
Применение данного изобретения в нриводах мащин и автоматов, например в промыщленных работах, позволит новысить их быстродействие и уиростить конструкцию.
Формула изобретения
Гидравлический следящий привод, содержащий задающее устройство, следящий распределитель, связанный устройством отрицательной обратной связи с иснолнительным гидродвнгателем, и устройство дополнительной обратной связи по нагрузке на исполнительном гидродвигателе, отличающийся тем, что, с целью повышения быстродействия и упрощения конструкции, устройство дополнительиой обратной связи выполнено в виде двухщелевого золотиика, расположенного в гильзе с образованием торцовых камер, поджатого с торцов регулируемыми пружинами и снабженного внутренними каналами для подачи рабочей жидкости из торцовых камер, подключенных к полостям гидродвигателя, к дросселирующим щелям.
Источники информации, принятые во внимание при экснертизе 1. Тумаркин М. Б. Гидравлические следящие приводы. М., «Машиностроение, 1966, с. 204, рис. 73.
9 fi 7
/// да /;

| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический следящий привод | 1982 |
|
SU1023151A1 |
| Пневмогидравлический следящий привод | 1989 |
|
SU1682640A1 |
| Гидравлический следящий привод | 1988 |
|
SU1560836A1 |
| Пневмогидравлический следящий привод | 1982 |
|
SU1025924A1 |
| Электрогидравлический следящий привод | 1978 |
|
SU754124A1 |
| Пневмогидравлический следящий привод | 1987 |
|
SU1479713A1 |
| Гидравлический следящий привод | 1982 |
|
SU1019117A1 |
| Следящий привод | 1976 |
|
SU635296A1 |
| Пневмогидравлический следящий привод с цифровым управлением | 1980 |
|
SU1011920A1 |
| Пневмогидропреобразователь | 1974 |
|
SU524929A1 |
Jill
