(54) РЫЧАЖНО-МЕХАНИЧЕСКАЯ ПЕРЕДАЧА
| название | год | авторы | номер документа |
|---|---|---|---|
| ТОРЦОВАЯ ПЕРЕДАЧА С ПРОМЕЖУТОЧНЫМИ ЗВЕНЬЯМИ | 1995 |
|
RU2108506C1 |
| РЫЧАЖНО-КУЛАЧКОВЫЙ МЕХАНИЗМ | 1991 |
|
RU2011071C1 |
| РЫЧАЖНОЕ УСТРОЙСТВО С ПОДВИЖНОЙ ОПОРОЙ И ПРЕСС | 1991 |
|
RU2037697C1 |
| Способ дефектоскопии роторов турбин с тепловыми и уплотнительными канавками по окружности и устройство для его осуществления | 1989 |
|
SU1777070A1 |
| Преобразователь линейных перемещений | 1991 |
|
SU1796864A1 |
| Весы для взвешивания большегрузных объектов | 1991 |
|
SU1774189A1 |
| Механотронный преобразователь линейных перемещений | 1991 |
|
SU1816961A1 |
| Устройство для определения горизонтального усилия от навесного почвообрабатывающего орудия | 2021 |
|
RU2770796C1 |
| Устройство рубки движущейся ленты древесного шпона с ножом и узлом его натяжения, включая механизм вертикального перемещения прижимного вала с натяжителем цепи | 2021 |
|
RU2807977C2 |
| Устройство для измерения диаметра отверстия | 1990 |
|
SU1763861A1 |
Изобретение относится к технике линейных измерений, а именно к рычажно-механическим передачам для измерительных преобразователей.
Известны рычажно-механические преобразователи, содержащие корпус, измерительный ычаг, шарнирно свя- . занный с корпусом, и присоединительные поверхности на упомянутом рычаге для установки необходимых удлинителей fl
Такие передачи обладают высокой точностью, однако не пригодны для устройств, в которых измерительные рычаги нагружаются значительными измерительными усилиями, например в тензометрах, поскольку опоры измерительного рычага большинства пре- образователей и, в частности, механотронов не предназначены для войприятия значительных осебых усилий.
Известны также механические передачи к измерительным преобразователям с качательно подвижным воспринимающим звеном, включающие корпус, промежуточный рычаг и дополнительную опору пЕзомежуточного рычага, связанную с корпусом Г2.
Недостатком таких устройств является сложность, вызванная необходимостью осуществления силового aaNSJкания. между промежуточным рычагом и воспринимающим звеном, атакже ограниченная нагрузочная способность, регламентируемая габаритными размерами опоры промежуточного рычага.
Целью изобретения является упрощение конструкции и повышение нагрузочной способности рычажно-механи0ческой передачи.
Эта цель.достигается тем, что дополнительная опора выполнена в виде обоймы с цилиндрической поверхностью, расположенной так,, что ось
5 цилиндрической поверхности проходит через центр качания воспринимающего звена и перпендикулярна плоскости измерения, а промежуточный рычаг снабжен двумя симметрично располо0женными роликами, взаимодействующими с упомянутой цилиндрической поверхностью.
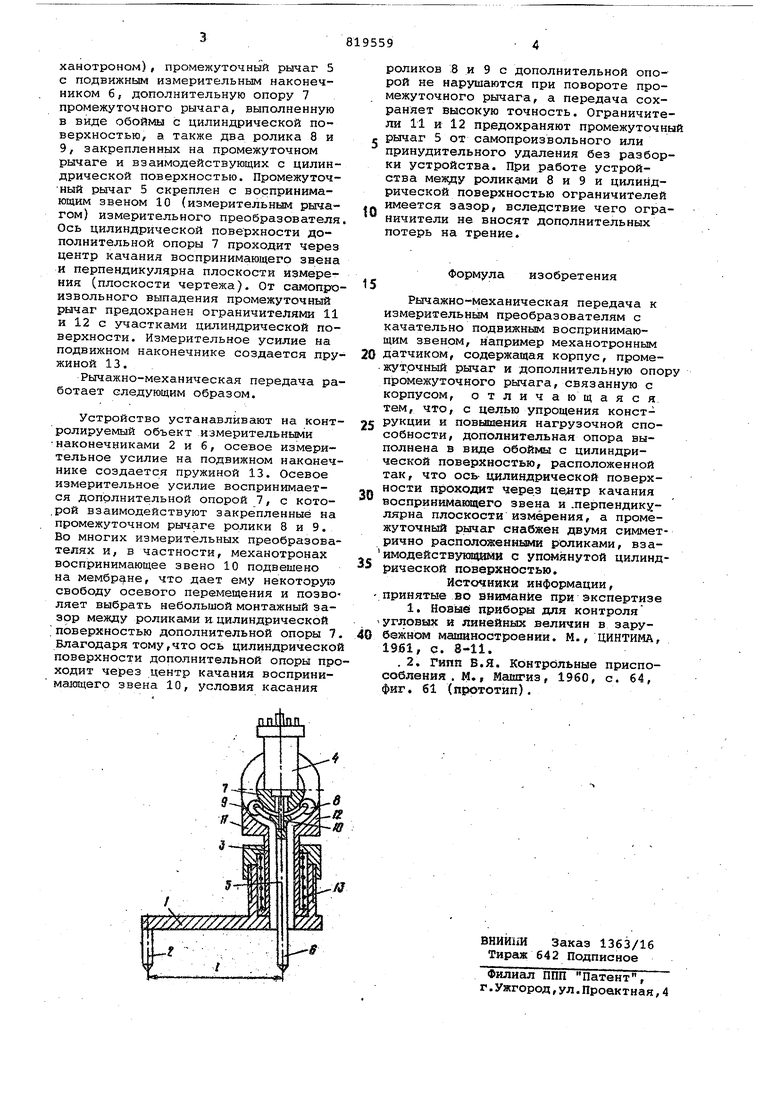
На чертеже изображенр измерительное устройство (тензометр), оснащен5ное предложенной рычажно-механической передачей.
Устройство содержит основание 1 с неподвижным измерительным наконечником 2, корпус 3 с закрепленным измерительным преобразователем 4 (ме- ,
ханотроном), промежуточный рычаг 5 с подвижным измерительным наконечником 6, дополнительную опору 7 промежуточного рычага, выполненную в виде обоймы с цилиндрической поверхностью, а также два ролика 8 и 9, закрепленных на промежуточном рычаге и взаимодействующих с цилиндрической поверхностью. Промежуточный рычаг 5 скреплен с воспринимающим звеном 10 {измерительным рычагом) измерительного преобразователя. Ось цилиндрической поверхности дополнительной опоры 7 проходит через центр качания воспринимающего зв€на и перпендикулярна плоскости измерения (плоскости чертежа). От самопроизвольного выпадения промежуточный рычаг предохранен ограничителями 11 и 12 с участками цилиндрической поверхности. Измерительное усилие на подвижном наконечнике создается пружиной 13.
Рычажно-механическая передача работает следующим образом.
Устройство устанавливают на контролируемый объект измерительньми
-наконечниками 2 и б, осевое измерительное усилие на подвижном наконечнике создается пружиной 13. Осевое измерительное усилие воспринимается дополнительной опорой 7, с кото.рой взаимодействуют закрепленные на промежуточном рычаге ролики 8 и 9. Во многих измерительных преобразователях и, в частности, механотронах воспринимающее звено 10 подвешено на мембране, что дает ему некоторую свободу осевого перемещения и позволяет выбрать небольшой монтажный зазор между роликами и цилиндрической
поверхностью дополнительной опоры 7 Благодаря тому,что ось цилиндрическо поверхности дополнительной опоры проходит через центр качания воспринимающего звена 10, условия касания
роликов .8 и 9 с дополнительной опорой не нарушаются при повороте промежуточного рычага, а передача сохраняет высокую точность. Ограничители 11 и 12 предохраняют промежуточны рычаг 5 от самопроизвольного или принудительного удаления без разборки устройства. При работе устройства мезеду роликами 8 и 9 и цилиндрической поверхностью ограничителей имеется зазор, вследствие чего ограничители не вносят дополнительных потерь на трение.
Формула изобретения
Рычажно-механическая передача к измерительным преобразователям с качатвльно подвижным воспринимающим звеном, например механотронным
0 датчиком, содержащая корпус, промежутрчннй рычаг и дополнительную опору промежуточного рычага, связанную с корпусом, отличающаяся тем, что, с целью упрощения конст5 РУкции и повышения нагрузочной способности, дополнительная опора выполнена в виде обоймы с цилиндрической поверхностью, расположенной так, что ось- цилиндрической поверхности проходит через целтр качания воспринимающего звена и .перпендикулярна плоскости измерения, а промежуточный рычаг снабжен двумя симметрично расположенными роликами, взаимодействуюпщмй с упомянутой цилинд5 р ической поверкностью.
Источники информации, - принятые во внимание при экспертизе
. 2. Гипп В.Я, Контрольные приспособления . М,, Машгиз, I960, с. 64, фиг, 61 (прототип).
