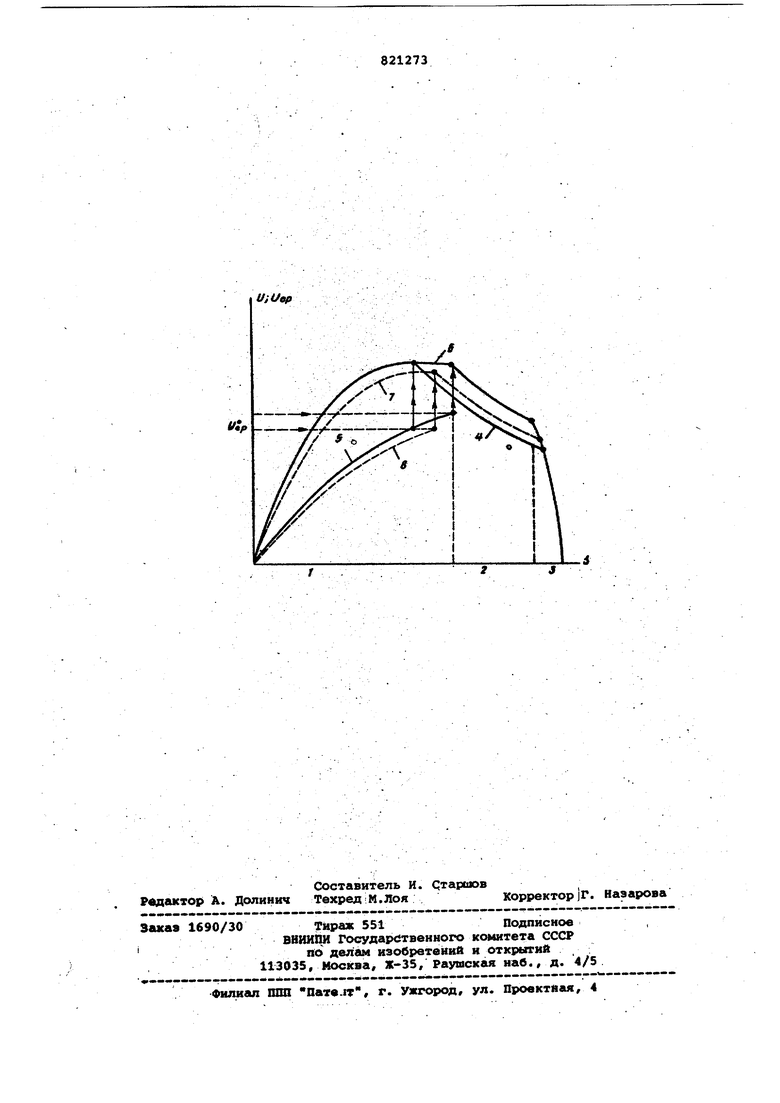
;, . ; 1 Изобретение относится к транспор ту и предназначено для автоматизации процесса ведения поезда на коротких перегонах и может быть использовано при разработке систем автоведения для поездов метрополитена и пригород ных поездов. Известны способы управления движением поездов на коротких перегонах которые предусматривает разгон поезда с заданным ускорением, затем отключение тяги я движение на выбеге, затем прицельное торможение и остановку поезда на следующей станции. Выполнение требуемого перегонного вр хода поезда, заданного графиком движения, достигается соответствующи выбором точки отключения тяги, когда или длина участка движения поезда под тягой, или время движения под тягой, или скорость поезда достигает определенной величины, которая выбирается в зависимости от требуегюго времени хода поезда по перегону Щ и 12. Известен также способ управления движением поезда, заключающийся в разгоне поезда, измерении скорости, сравнении ее с заданным значением, отключении тяги, движении поезда .по инерции и прицельном торможении C3j.: Недостатком известного способа является то, что на большинстве перегонов мгновенная фактическая скорость поезда в момент отключения тяги оказывается близкой к равновесной, т.е. ускорение поезда в момент отключения тяги мало. Поэтов незначительные ошибки при измерении текущего значения скорости поезда или при определении значения скорости отключения тяги вызывгиот существенные изменения времени разгона поезда, а следовательно и значительные отклонения фактического временя поезда по перегону от требуемого. Цель изобЕ етения - повышение точности выполнения времени хода поезда п6 перегону. Поставленная цель достигается тем, что с заданным значением скорости сравнивают текущее значение средней по времени хода скорости поезда под тягой. Средняя по времени скорость движения поезда при тяге растет более рашномерно, чем текущая, поэтому даже при приближении текущей скорости к равновесной средняя скорость будет продолжать растИу несмотря на то, чт текущая скорость практически не изменяется. Поэтому определение момента отключения тяги по средней скорос ти происходит значительно точнее, че по фактической текущей. На чертеже представлена траектория движения поезда, управление кото рым производится предложенйым способом. Траектория состоит из фазы 1 движения под тягой, фазы 2 выбега и фазы 3 прицельного торможения. Кривая 4показывает зависимость мгновенной скорости V от координаты поезда S при. номинальном весе поезда и графиковом времени хода по перегону. Кривая 5 показывает зависимость сред ней скорости поезда от координаты S при номинальном весе поезда. Кривая 6 - это траектория движения поезда номинального веса при меньшем чем графиковое время хода поезда по перегону. Кривые 7 я 8 - это зависимости мгновенной и средней скорости поезда соответственно.от координаты 5при увеличенном весе поезда и при графиковом времени хода поезда по перегону. ,, Управление движением поезда по предложенному способу осуществляется следующим образом. В момент отправления поезда со станции определяется величина заданной средней скорости движения под тя гой, которой поезд должен достичь в момент отключения тяги . Эта величина определяется в зависимости от требуемого времени хода поезда по перегону. Движение поезда под тягой производится до тех пор, пока величина средней по времени скорости Vj-p не достигнет уровня , после чегр поезд переходит на выбег (фаза 2). В заключительной стадии движения (фаза 3) производится прицельное тор можение на следующей станции. В cлSчa опоздания требуемое время хода поезда уменьшается, поэтому величина заданного уровня средней скорости отключения тяги увеличивается, так как зависимость от времени хода носит убнвгиощий характер. Поэтому отключение тяги происходит в более поздний момент ив дальнейшем поезд двигается по траектории 6. Время хода по этой траектории меньше, чем по траектории 4, что приводит к компенсации опоздания. Предложенный способ управления движением поезда обеспечивает высокую точность выполнения требуемого времени хода поезда и в условиях изменения таких параметров, как масса поезда, напряжение в контактной сети и т.д.: . Заданный уровень средней скорости отключения тяги поезда может вычисляться в момент отправления поезда со станции в функции от требуемого времени хода презда. При этом зависимость величины от требуемого времени хода определяется заранее для каждого перегона и номинальной массы поезда. Формула изобретения Способ управления движением поезда, заключающийся в разгоне поезда, измерении скорости, сравнении ее с заданным значением, отключении тяги, движении поезда по инерции и прицельном торможении, отличающ и и с я тем, что, с целью повышения точности выполнения времени хода поезда по перегону, с заданным значением скорости сравнивают текущее значение средней по времени хода скорости поезда под тягой. Источники информации, принятые во внимание при экспертизе / 1.Авторское свидетельство СССР 330061, кл. В 61 1, 3/00, 1970. 2.Авторское свидетельство СССР № 497184, кл. В 61 L 3/2(), 1962. 3.Авторское свидетельство СССР, 190405, кл. В 6Р L 15/20, 1965 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ ЭЛЕКТРОПОЕЗДА | 2002 |
|
RU2213669C1 |
| Устройство для управления скоростью подвижного состава | 1983 |
|
SU1106698A1 |
| СПОСОБ НЕЧЕТКОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПОДВИЖНОГО СОСТАВА РЕЛЬСОВОГО ТРАНСПОРТНОГО СРЕДСТВА С ВОЗМОЖНОСТЬЮ ПЛАВНОГО УПРАВЛЕНИЯ ТЯГОЙ | 2004 |
|
RU2296357C2 |
| Устройство для управления движением поездов | 1976 |
|
SU592067A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ НЕПРОИЗВОДИТЕЛЬНЫХ ПОТЕРЬ ЭЛЕКТРОЭНЕРГИИ ЭЛЕКТРОПОДВИЖНЫМ СОСТАВОМ ПРИ НАГОНЕ ГРАФИКОВОГО ВРЕМЕНИ С ИСПОЛЬЗОВАНИЕМ БОРТОВЫХ ИНФОРМАЦИОННО-ИЗМЕРИТЕЛЬНЫХ КОМПЛЕКСОВ УЧЕТА ЭЛЕКТРОЭНЕРГИИ | 2015 |
|
RU2591558C1 |
| Устройство для автоведения поездов метрополитена | 1977 |
|
SU768686A1 |
| Устройство автоматического управления движением поездов метрополитена | 1980 |
|
SU880841A1 |
| Устройство для управления отключением силы тяги электропоезда | 1973 |
|
SU477021A1 |
| Устройство для автоматического управления движением поезда | 1981 |
|
SU1044524A1 |
| СИСТЕМА АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ ДВИЖЕНИЕМ ПАССАЖИРСКОГО ЭЛЕКТРОВОЗА | 2006 |
|
RU2320498C1 |