(54) УСТРОЙСТВО ДЛЯ ВЫГРУЗКИ ГРУЗОВ
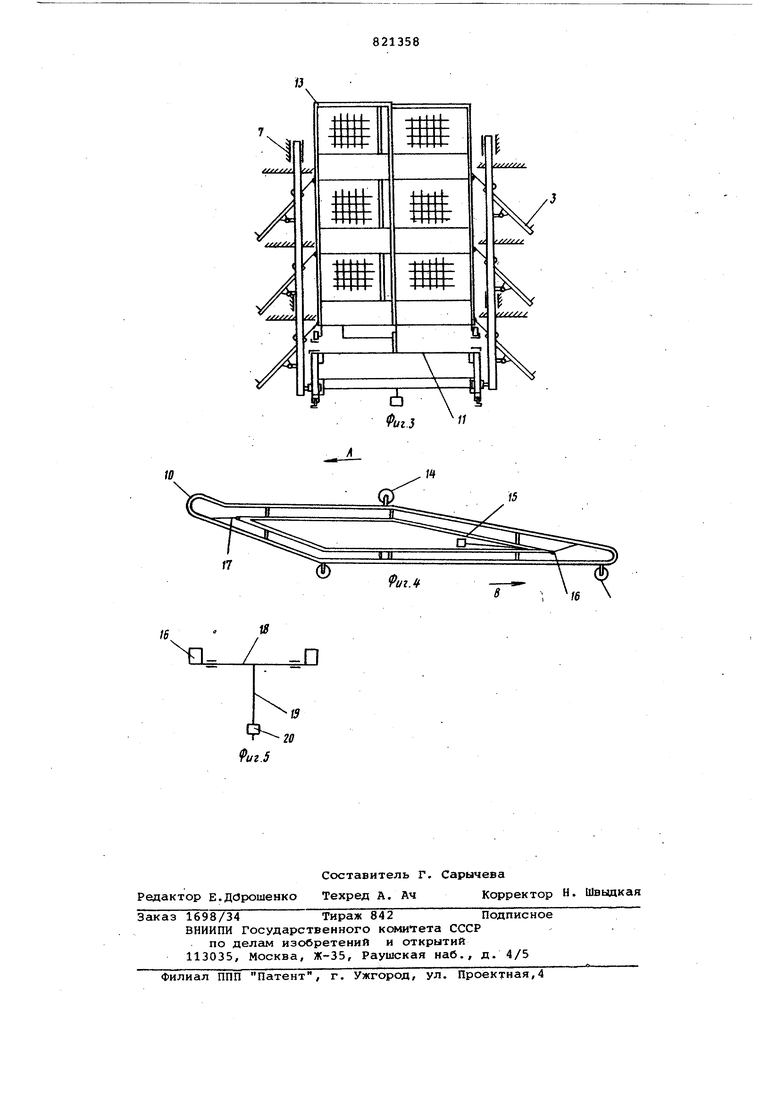
шарнирно закреплены консольные опорные площадки 3. На площадках установлены кронштейны 4, на осях которых свободнсР посажены ролики 5, опирающиеся на жесткие направляющие 6.
Верхние концы стоек 1 установлены в направляющих 7, а нижние имеют свободно посаженные на осях 8 ролики 9, контактирующие с копирным механизмом
Копирный механизм состоит из двух копирных рамок 10, соединенных между собой переклсщинами 1Г, верхняя и-з которых соединена с тяговым органом 12 возвратно-поступательного привода стеллажа 13.
Копирная рамка (фиг.4;имеет опорные -ролики 14 и замкнутый в форяле четырехугольника направляющий паз 15 для роликов 9. В пазу 15 шарнирно закреплены клапаны 16 и 17.
Клапаны 16 обеих копирных рамок жестко соединены с валиком 18, к кото рому на стержне 19 прикреплен груз 20 На стеллаже 13 установлены поддоны 21. Площадки 3 снабжены упорами 22. Тяговый орган снабжен пальцем 23, взаимодействующим со стеллажом 13.
Устройство работает следующим образом.
В конце рабочего хода тягового органа 12 стеллаж 13 останавливается между стойками 1 в рабочей зоне устройства.
В первой половине холостого хода тягового органа копирные рамки 10 перемещаются им в. направлении стрелки А по верхнему горизонтальному участку направляющей дорожки относительно роликов 9. При этом опорные площадки 3.находятся в горизонтальном положении и принимают на себя поддоны 21, вытягиваемые из стеллажа специальным устройством (не показано. При дальнейшем движении рамок 10 относительно роликов 9 последние переходят на верхний наклонный участок направляющей дорожки, опуская стойки 1. При этом площадки 3 поворачиваются относительно осей 2 и опрокидывают поддоны. Угол поворота площадок ограничен упорами 22. При движении.рамок ролики 9 наезжают на клапаны 16, которые, поворачиваясь, опускают ролики на нижний горизонтальный участок замкнутого направляющего паза 15. Под действием груза 20 клапаны возвращаются в исходное положение. Холостой ход тягового органа .заканчивается.
При рабочем ходе тягового органа палец 23, расположенный на нем,зацепляется со стеллажом и транспортирует его с оп-ущеннйми поддонами в сторону выхода из устройства.
Одновременно рамки 10 перемацаются относительно роликов 9 в направлении стрелки В.
Торцы поддонов выходят за пределы торцов опорных площадок. При дальнейшем перемацении рамок относительно роликов 9 по нижнему наклонному . учёютку паза 15 происходит подъем стоек 1 и площадок 3, при этом ролики 5 обкатываются относительно направляющих 6. Ролики 9, откидывая клапаны 17, которое затем возвращаются в исходное положение, переходят на верхний участок направляющей дорожки. Рабочий ход тягового органа привода стеллажа заканчивается.
Использование этого устройства в оборудовании для выргицивания бройлеров в многоярусных клетках-контейнерах, содержащих съемные поддоны -дл помета, на линиях с замкнутым технологическим циклом автоматизиро-. ванных .птицефабрик обеспечивает как синхронную работу подающего контейнера с устройством для опрокидывания поддонов, так и ритмичную работу всех элементов технологическо линии в целом за счет использования приводного механизма шагового перемещения контейнеров для привода механизма опрокидывания поддонов.
Формула изобретения
Устройство для выгрузки грузов, преимущественно с поддонов многоярусного передвижного от приводного тягового органа стеллажа,содержащее поворотную в вертикальной плоскости площадку, прикрепленную к вертикальной штанге, снабженной роликом, и установленную с возможностью возвратно-поступательного движения копирную рамку с направляющим пазом, в котором размещен ролик штанги, о тл и ч а ю щ е е с я тем, что, с целью повышений над ежности работы устройства при выгрузке грузов из передвижных стеллажей, копирная рамка прикреплена к тяговому органу привода стеллажа, а направляющий паз имеет форму четырехугольника и снабжен перекрывающими нижнюю и верхнюю стороны четырехугольника клапанами.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР 521202, кл. В 65 G 57/16, 1973.
2,Авторское свидетельство СССР 611835, кл. В 65 а 57/16, 1974 (прототип).
7
23 „ 8
.i
| название | год | авторы | номер документа |
|---|---|---|---|
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Многоярусная автостоянка | 2002 |
|
RU2224861C1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Склад для хранения затаренных грузов (его варианты) | 1984 |
|
SU1217729A1 |
| СПОСОБ ЗАГРУЗКИ И ВЫГРУЗКИ АВТОМОБИЛЯ В МНОГОЯРУСНОЙ МЕХАНИЗИРОВАННОЙ АВТОСТОЯНКЕ С ОППОЗИТНЫМ РАСПОЛОЖЕНИЕМ ЯЧЕЕК ХРАНЕНИЯ ОТНОСИТЕЛЬНО ШАХТЫ ПОДЪЕМНИКА И АВТОСТОЯНКА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1997 |
|
RU2120528C1 |
| Грузоподъемная площадка крана-штабелера | 1978 |
|
SU887389A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 2003 |
|
RU2247815C1 |
| Устройство для загрузки гравитационных многоярусных многорядных стеллажейштучными грузами | 1972 |
|
SU481501A1 |
| Устройство для загрузки и выгрузки поддонов в агрегате для химико-термической обработки изделий | 1982 |
|
SU1257393A1 |
| Элеваторный стеллаж | 1985 |
|
SU1306854A1 |

N
х/уху
УУХххх
rxxvxxy
f.HJ
fej
Г7
tf
/5
Чп
-П
1 -..
иг.5
/5
