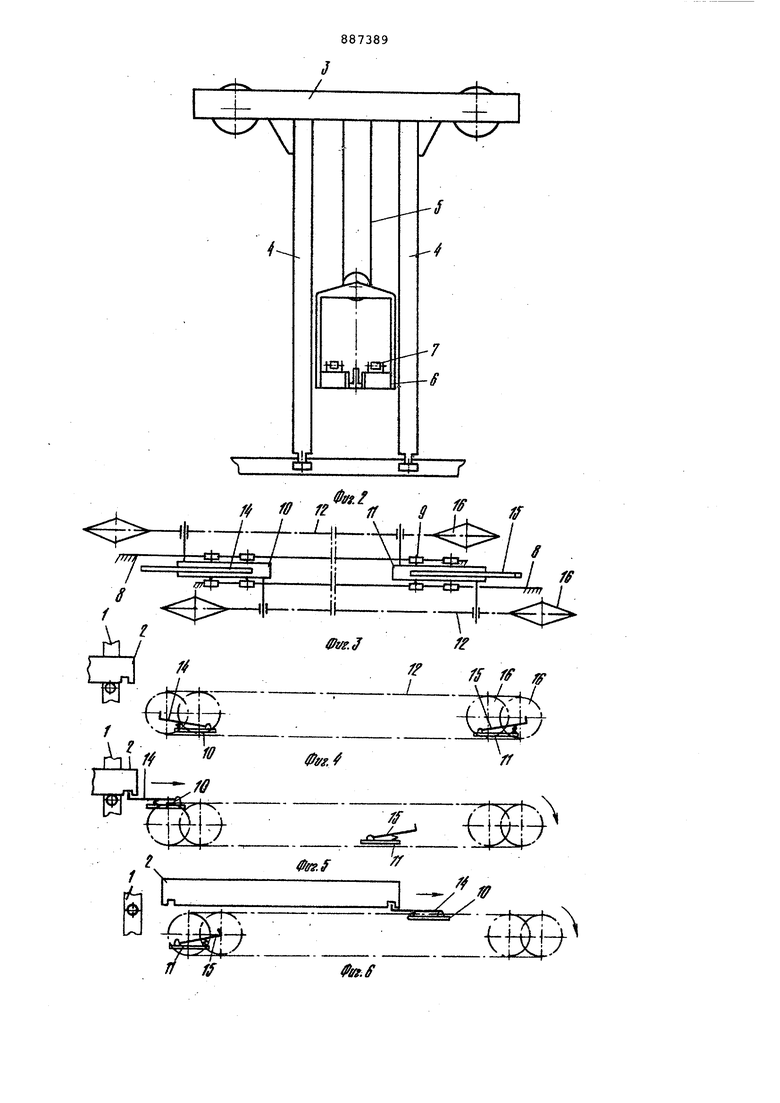
Изобретение относится к оборудованию складов, в частности к грузоподъемным площсщкам кранов-штабелеров. Известна грузоподъемная площадка крана-штабелера, содержащая горизонТЕшьно расположенные направляющие для поддона, между которыми подвижно установлена каретка, связанная с приводом и снабженная грузозахватными рычагами 1..: Недостатком известной конструкции является ненадежность фиксирования поддона на грузоподъемной площадке. Известна грузоподъемная площадка крана-штабелера, преимущественно для поддонов с пазами для их захвата, со держащая горизонтально расположенные направляющие для поддона, между которыми установлены две каретки, подвижные от приводных горизонтально размещенных замкнутых цепных контуро огибающих звездочки и расположенных параллельных плоскостях, и закреп.ленные на каретках грузозахватные подпружиненные рычаги с вертикальными выступами 2. Известная площадка снабжена механизмом сцепления каретки с ветвями цепных контуров, что усложняет ее конструкцию и снижает надежность. Цель изобретения - упрощение конструкции и повышение надежности грузоподъемной площадки. Это достигается тем, что каждая каретка шарнирно прикреплена к цепям контуров, при этом минимальное расстояние между осями крепления кареток к цепям больше расстояния между пазами поддона на величину суммарного расстояния от оси крепления каждой каретки до- выступа соответствующего грузозахватного рычага, -а расстояние между осями звездочек больше или равно расстоянию между упомянутыми осями крепления. Ось крепления каждой каретки к одному цепному контуру смещена в горизонтальной плоекости по отношению к оси крепления этой каретки к другому цепному контуру, а оси звездочек одного контура смещены в -горизонтальной плоскости по отношению к осям звездочек другого контура. Оси |иарнирного крепления кареток к цепям могут быть расположены внутри цепных контуров. На фиг. 1 показан кран-штабелер с предлагаемой грузоподъемной площадкой; на фиг. 2 - то же, вид сбоку; на фиг. 3 - кинематическая схема каретки с грузозахватными рычагами, вид в плане; на фиг. 4 - каретка с грузозахватными рычагами в исходном положении; на фиг. 5 то же, в момент захвата поддона; на фиг.б то же, при установке поддона на площадку крана-штабелера; на фиг. 7 то же, по окончании установки поддона на платформу крана-штабелера; на фиг. 8 - то же, общий вид. Кран-штабелер содержит многоярусные стеллажи 1, в ячейках которых размещены поддоны 2 с грузом. По вер ху стеллажей уложены направляющие для ходовых колес моста 3 штабелера .стойки 4 которого снабжены роликами для перемещения по напольным направляющим. Вдоль вертикальных стоек 4 перемещается при помощи канатного ме ханизма 5 грузоподъемная площадка 6 На площадке б установлены горизонтальные направляющие 7 в виде рольганга, по которым перемещается поддон с грузом. Ниже направляющих 7 смонтированы другие направляющие 8, по которым на горизонтальных участках трассы перемещаются на роликах 9 каретки 10 и 11, отстоящие друг от друга на величину, большую длины под дона. Каретки 10 и 11 шарнирно связаны с цепями 12, образующими горизонтальные контуры,размещенные в па раллельных плоскостях с помощью кро штейнов 13,обращенных внутрь цепной передачи и снабжены грузозахватными подпружиненными рычагами 14 и 15,на правленными в противоположные сторо Цепи 12 перемещаются синхронно и пр водятся в движение звездочками 16. Расстояние между выступами рычагов на верхнем уровне равно расстоянию между ответными пазами поддона. Минимальное расстояние между ося ми крепления кареток к цепям больше расстояния между пазами поддона на величину суммарного расстояния от оси крепления каждой каретки 10 и 11 до выступа соответствующего грузозахватного рычага, а расстояние между осями звездочек 16 больше или равно расстоянию между осями крепления. Ось крепления каждой каретки к одному цепному контуру смещена в горизонтальной плоскости по отношен к оси крепления этой каретки к друг му цепному контуру, а оси звездочек |16 обоих контуров смещены относител но друг друга, причем оси шарнирного крепления кареток из-за того, чт выступы кронштейнов 13 -обращены внутрь контуров, расположены внутри цепных контуров. Каретки могут быт-ь шарнирно прикреплены к одному цепному контуру и снабжены, например, противовесом для исключения опрокидывания при перемещении их с одной горизонтальйой ветви на другою. Для выгрузки из стеллажа 1 поддона 2 мост 3 с подъемно-опускной площадкой б перемещается к соответствуюей ячейке. В исходном положении каетки 10 и 11 с рычагами 14 и 15 ра;сполагаются на нижних ветвях цепей 12, не выходя за пределы цепной передачи и площадки б (фиг. 4). Каретки 10 и 11 подаются к подлежаще- му выгрузке поддону. Каретка 10, перемещающаяся к поддону, в крайнем положении поднимается, огибая звездочку 16, и совершает плоскопараллельное движение в вертикальной плоскости. При этом рычаг 14 каретки 10 входит во взаимодействие с поддоном 2 (фиг. 5). Для того чтобы каретки 10 и 11 не переворачивались, переходя с одной ветви цепей 12 на другую, оси звездочек 1б смещены относительно друг друга. Продолжая двигаться на верхнем уровне цепей 12, каретка 10 увлекает за собой поддон, сдвигая его по направляющим 7 площадки 6 (фиг. б). В определенный момент каретка 11 проходит под кареткой 10, а достигнув крайнего левого положения, каретка 11 поднимается на вертикальную ветвь цепей 12. При подъеме на верхний уровень каретка 11.рычагом 15 сцепляется с поддоном. Привод перемещения цепей 12 отключается. На площадке поддон по торцам оказывается сцеплен с двумя рычагами 14 и 15, направленными навстречу друг другу (фиг. 7). В таком положении поддон транспортируется к месту разгрузки. При разгрузке включается привод перемещения цепей 12 Рычаги 14 и 15 с каретками 10 и 11 поочередно переходят с верхнего уровня цепей 12 на нижний, расцепляясь с поддоном и сталкивая его в нужную ячейку или на разгрузочную площадку. К концу разгрузки каретки 10 и 11 с рычагами 14 и 15 становятся в исходную позицию для разгрузки. При этом холостой ход кареток отсутствует. Цикл повторяется. Стеллажи могут быть расположены с обеих сторон крана-штабелера. Наличие двух кареток, связанных .между собой бесконечными тяговыми органами и совершающих плоскопараллельное движение в вертикальной плоскости на двух горизонтальных уровнях, причем каретки отстоят друг от друга на величину, большую длины поддона и снабжены двумя противоположно направленными грузозахватными рычагами, расстояние между которыми при положении кареток на верхнем уровне равно расстоянию между ответными пазами поддона, позволяет исключить холостые перемещения кареток, что повышает эффективность работы кранаштабелера. Кроме того, такая конструкция позволяет автоматически сцеплять
поддон при транспортировке с двумя рычагами, что улучшает фиксацию поддона на площадке крана-штабелера.
Так как загрузка и выгрузка поддона осуществляется при переходе кареток с нижних ветвей цепей на верхние и наоборот в крайних положениях кареток, отпадает необходимость дистанционного управления/ что упрощает конструкцию площадки. Наличие кронштейнов, крепящих каретки к цепи обращенных внутрь цепной передачи, позволяет уменьшить вертикальный ход каретки. Тем самым уменьшается расстояние между поддонами в стеллаже, т.е. увеличивается емкость стеллажа.
Формула изобретения
1. Грузоподъемная площадка кранаштабелера, преимущественно для поддонов с пазами для их захвата, содержащая горизонтально расположенные направляющие для поддона, между которыми установлены две каретки, подвижные от приводных горизонтально размещенных замкнутых цепных контуров, огибающих звездочки и расположенных в параллельных плоскостях, закрепленные на каретках грузозахватные подпружиненные рычаги с вертикальными выступами ,.отличающаяс я тем, что, с целью упрощения конструкции и повышения надежности, каждая каретка шарнирно приклеплена к цепям контуров, при этом минимальное расстояние между осями крепления кареток к цепям больше расстояния между пазами поддона на величину суммарного расстояния от оси крепления каждой каретки до выступа соответствующего грузозахватного рычага, а расстояние между осями звездочек больше или равно расстоянию между упо0мянутыми осями крепления.
2.Грузоподъемная площадка по п.1,о тличающаяся тем,что. ось крепления каждой каретки к одному цепному контуру смещена в горизон5тальной плоскости по отношению к оси Крепления этой каретки к другому цепному контуру, а оси звездочек одного контура смещены в горизонтальной плоскости по отношению к осям звез0дочек другого контура.
3.Грузоподъемная площадка по п.1 и2, о тличающаяся тем, что оси шарнирного крепления кареток к цепям расположены внутри цепных
5 контуров.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР . № 348462, кл. В 65 С 61/00, 1966.
2.Авторское свидетельство СССР
0 по заявке № 2670769/27-И,
кл. В 65 G 61/00, 28.09.78 (прототип).
ig
Sfr
7 //%
if ifr


| название | год | авторы | номер документа |
|---|---|---|---|
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU1014788A1 |
| Грузоподъемная площадка крана- шТАбЕлЕРА | 1978 |
|
SU796128A1 |
| Грузоподъемная площадка крана-штабелера | 1981 |
|
SU981129A1 |
| Грузоподъемная площадка крана-штабелера для поддонов с пазами под грузозахватные элементы | 1982 |
|
SU1058835A1 |
| Грузоподъемная площадка крана-штабелера | 1980 |
|
SU981126A1 |
| Грузоподъемная площадка крана-штабелера | 1990 |
|
SU1773814A1 |
| МНОГОЯРУСНАЯ МЕХАНИЗИРОВАННАЯ АВТОСТОЯНКА | 1997 |
|
RU2120012C1 |
| Склад для хранения штучных грузов | 1983 |
|
SU1152891A1 |
| Грузоподъемная площадка крана-штабе-лЕРА | 1979 |
|
SU844519A1 |
| Грузоподъемная площадка крана-штабелера | 1988 |
|
SU1569289A1 |