1
Изобретение относится к устройствам для фиксирования животных,в частности для захватывания и удерживания овец за ноги при зооветобработке.
Известно устройство для удерживания животных, содержащее станок с одной подвижной боковиной,смонтированный в кольцевых опорах, перейещаемых по направляющим lj .
Однако фиксация животного в стенке осуществляется только за туловище и устройство не может использоваться для обработки ног животного.
Известно также устройство для поворачивания животных, содержащее ограду, концы которой опираются на желобчатые кольцевые опоры, вращающиеся на колёсах, расположенных в каждом углу основания. Станок снабжен привязным ремнем, хомутом и привязью для каждой ноги животного р
Фиксация животного за ноги, поворот станка и возвращение его в исходное положение, а также расфкксаци является неудобными и трудоемкими операциями.
Цель изобретения - улучшение фиксации ног животного и снижение труГхозатрат при их обработке.
Поставленная цель достигается тем, что в устройстве для зооветобработки животных приспособление для фиксации ног животного выполнено в виде шарнирно прикрепленных к боковым стенкам станка створок с приводом, операцйонно связанных с приводом поворота станка автоматической схемой управления, причем автоматическая
0 схема управления включает датчики наличия животного в станке и выхода животного из станка, связанные со входами схемы совпадения, выход которой подключен к входу триггера
5 привода створок , соединенному со входом триггера привода поворота станка.
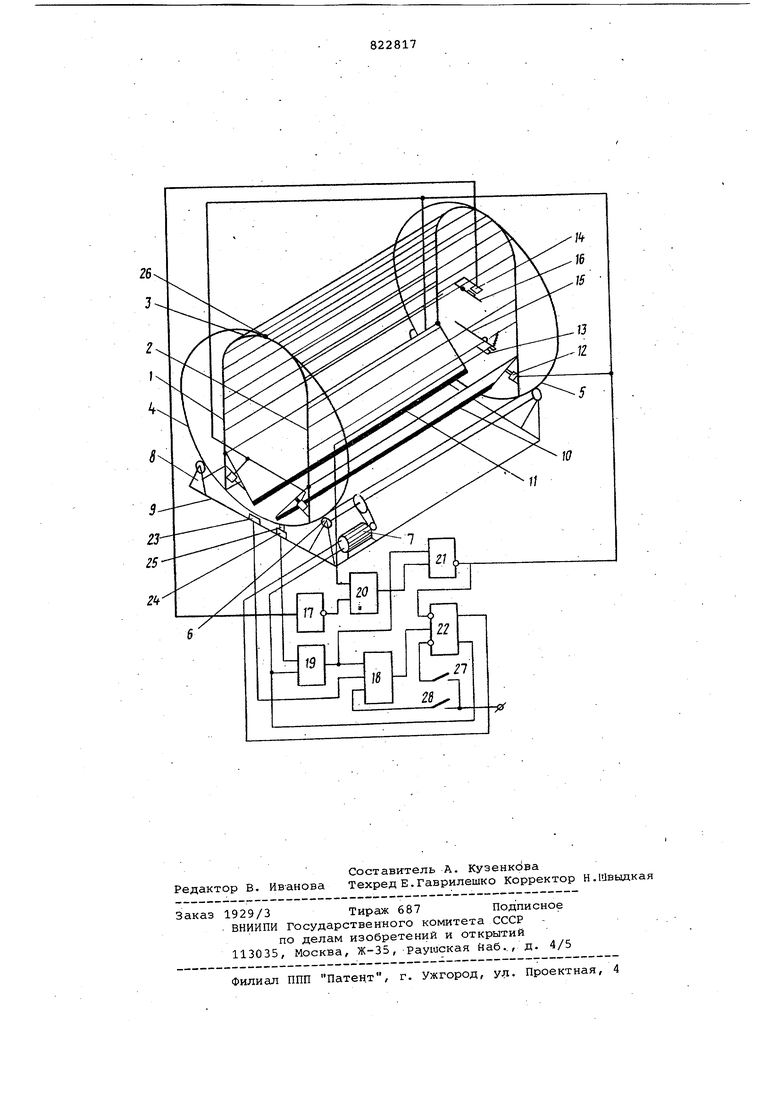
На чертеже приведена принципиальная схема устройства для зооветобра0ботки животных.
Устройство содержит станок, состоящий из двух боковых решетчатых стенок 1 и 2 и овальной верхушки 3, концами прямоугольного основания и
5 вершиной опирается на кольцевые опоры 4 и 5, выполненные с возможностью поворота на четырех роликах 6, вращающиеся от. привода 7. Ролики закреплены на стойках 8, установленных на
0 раме 9. На боковых стенках шарнирно
установлены гтворки 10 и 11 с возможностью сближения нижних кромок, расположенных .выше уровня пола станка и снабженных валиками из мягкого материала, например из пористо резины. Сближение створок производится приводом 12. В передней части станка установлены датчик 13 наличия животного в станке и датчик 14 выхода животного из станка. Элементы воздействия на датчики установлены на рычагах 15 и 16 соответственно. Датчики 13 и 14 включены в схему автоматического управления, состоящую из инвертора 17, схемы 18 объединения, схем 19 и 20 совпадения, триггера 21 привода створок и триггера 22 привода поворота станчка.Положение станка относительно рамы контролируется датчиками 23 и 24 с воздействующими на них элементами 25 и 26.
Устройство работает следующим образом.
Проходящее через станок животное корпусом нажимает на рычаг 15,второ плечо которого вносит элемент воздействия на датчик 13 наличия животного в станке. Сигнал с выхода этого датчика подается на вход схемы 20 совпадения, на второй вход которой также подается сигнал с выхода инвертора 17, так как рычаг 16 расположен дальше по ходу животного и сигнал с выхода датчика 14 не поступает. Совпадение сигналов на входе схемы 20 вызывает переключение триггера 21, по сигналу выхода которого включается привод 12 створок 10 и 11. При этом нижними кромками створок зажимаются ноги животного. Кроме того, сигналом сВыхода триггера 21 включается триггер 22, выход которого подключен к приводу 7 поворота станка. Вращение роликов б обеспечиваЬт поворот кольцевых опор 4 и 5 вместе с животным. Поворот заканчивается при воздействии элемента 26 на датчик 23 опрокинутого положения станка. При этом .по сигналу с выхода схемы 18 объединения триггер 22 переключается в нейральное положение и привод 7 отключется. В дальнейшем оператором производится зооветобработка животного.
После окончания обработки оператор нажимает кнопку 27 и триггер 22 переключается на подачу сигнала на привод 7 для возвращения станка в исходное положение. При воздействии элемента 25 на датчик 24 исходного положения станка сигналом с выхода схемы 19 совпадения через.
схему 18 триггер 22 переключается в нейтральное положение для остановки привода 7 поворота станка.. Кроме того, сигналом с выхода схемы 19 переключается жриггер 21 и привод створок отключается. Животное выходи из станка, нажимая при этом рычаги 15 и 16. Во время выхода животного из станка повторный захват его ног исключается тем, что при нажатом рычаге 16 сигналом с выхода датчика 14 обеспечивается нулевой сигнал на выходе инвертора 17. После выпуска прошедшего зооветобработку животного и запуска оператором следующего животного устройство работает аналогично. Если окажется оператору более удобным промежуточное между исходным и вертикальным положение ног животного, то поворот станка прекращается нажатием кнопки 28.
Предлагаемое устройство применимо для фиксации ног во время обработки на овцеводческих комплексах промышленного типа. Его применение сокращает трудозатраты при зооветобработке в 2 раза.
Предварительный расчет показывает что использование одного устройства для зооветобработки дает экономический эффект в 670 руб.
Формула изобретения
Устройство для зооветобработки животных, содержсвдее станок,смонтированный в кольцевых опорах,привод поворота станка вокруг продольной оси и приспособление для фиксации ног животного, отличающееся тем, что, с целью снижения трудоемкости обработки, приспособление для фиксации ног выполнено в виде шарнирно прикрепленных к боковым стенкам станка створок с приводом, связанных с приводом поворота станка посредством автоматической схемы управления, причем автоматическая схема управления выполнена в виде датчиков наличия животного в станке и выхода животного из станка, связанных со входом схемы совпадения, выход которой подключен к входу триггера привода створок, соединенному со входом триггера привода поворота
станка.
Источники информации, принятые во внимание при экспертизе
1.Патент США № 2683441, кл. 119103, 1954.
2.Патент Великобритании
№ 1495695, кл. А 5 R,1977 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для искусственного осеменения животных | 1980 |
|
SU888985A1 |
| СТАНОК ДЛЯ ДОЕНИЯ КОРОВ | 2000 |
|
RU2185053C2 |
| Вентильный электродвигатель | 1984 |
|
SU1272413A2 |
| Станок для сверления печатных плат | 1979 |
|
SU841798A1 |
| Бесконтактное устройство для автоматического управления и контроля системой смазки | 1981 |
|
SU953354A2 |
| Станок для автоматического фрезерования коллекторов электрических машин | 1981 |
|
SU991538A1 |
| Устройство автоматического пореза передних и задних концов полосы | 1973 |
|
SU500978A1 |
| ДОИЛЬНЫЙ СТАНОК ДЛЯ КРОЛЬЧИХ | 2006 |
|
RU2341076C2 |
| Вентильный электродвигатель | 1981 |
|
SU970578A1 |
| Устройство доения коров | 1988 |
|
SU1613067A1 |