ц 20 7 ;/
5 8
571
СО СдЭ
Изобретение относится к устройствам вакуумной техники и предназначено для передачи изделий в вакуумных установках спектрального анализа, моле- кулярно-лучевой эпитаксии и других технологических установок крупносе-, рийного и массового производства полупроводниковых изделий и материалов
Целью изобретения является расшире ние технологических возможностей за счет обеспечения точной установки схвата в пространстве.
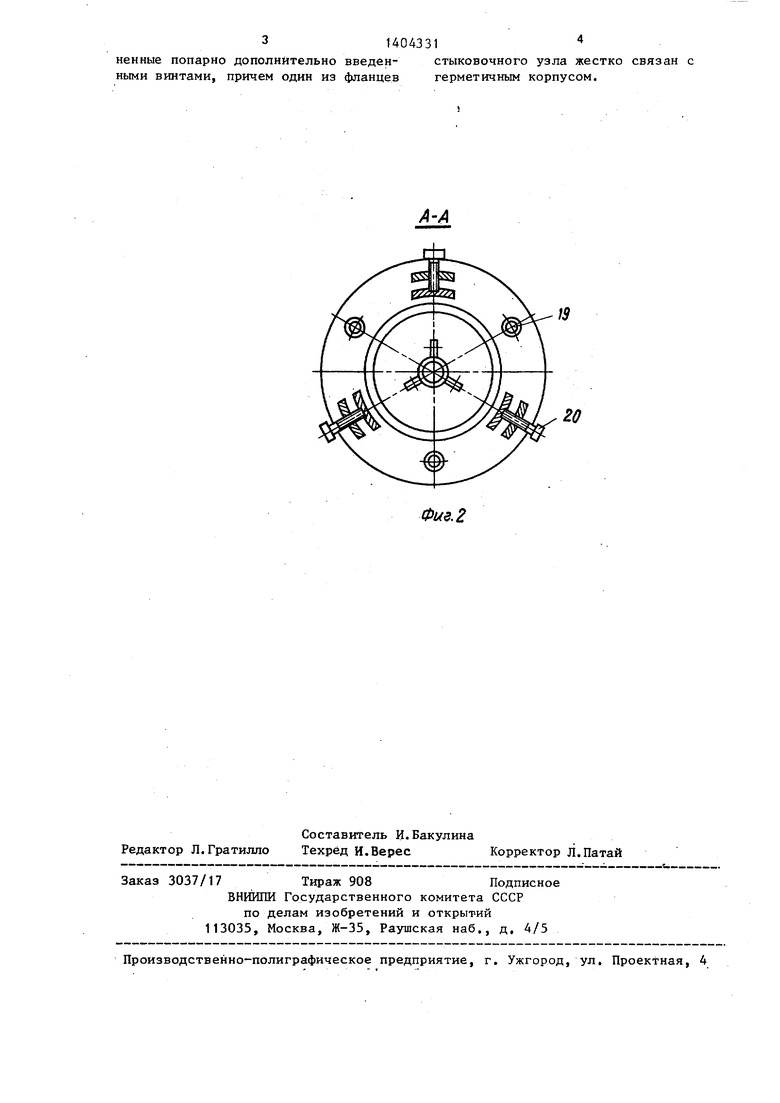
На фиг.1 изображен вакуумньй манипулятор, общий ввд, разрез; на фиг.2 сечение А-А на фиг.1.
Манипулятор состоит из герметичного корпуса 1, ползуна 2, расположенного в герметичном корпусе на направляющих 3 качения, схвата 4 с двумя губками 5-и 6,пружины 7, тяги 8 механизма 9 продольного перемещения,- привода 10 схвата с барабаном 11,тросика 12 с натяжными роликами 13 и пружиной 14. На фланце 15 герметичного корпуса 1 коаксиально ползуну 2 со схватом 4 закреплен стыковочный узел. Стыковочный узел выполнен в виде сильфона 16 с двумя фланцами 17 и 18, Фланец 17 необходим для крепления стыковочного узла к герметичному корпусу 1, а фланец 18 - для крепления манипулятора вакуумного манипулятора на вакуумной камере. Фланцы 17 и 18 установлены с возможностью регулировочного перемещения друг относительно друга и связаны посредством шпилек 19. На фланцах 17 и 18 выполнены выступы, расположенные на разных уровнях параллельно оси ползуна 2 и соединенные попарно винтами 20.
Вакуумный манипулятор работает следующим образом.
При установке образца в схват привод 10 сильфонного типа вращает ба- рабан 11. В результате намотки на барабан тросика 12 происходит его укорачивание в промежутке между барабаном 11 и схватом 4. Это приводит к перемещению тяг 8 и повороту связанных с ними губок 5 и 6. После установки образца в схват за счет вращения барабана в противоположную сторону происходит удлинение тррсика, тяги 8 становятся свободными и губки 5 и 6 под действием пружины 7 поворачиваются и зажимают образец. Пружина 14 обеспечивает натяжение тросика, а ролики 13 - его направление. Пере
д
15
0 5 о Q
с
5
0
мещение ползуна вперед и назад осуществляется с помощью механизма 9 прЬ- дрльного перемещения посредством реечной передачи.
Управление схватом 4 может быть осуществлено в любом положении ползуна 2 и при его перемещении.
Регулировка положения схвата с образцом относительно приемного столика в рабочей вакуумной камере при его перемещении производится за счет деформации сильфона 16 в горизонтальном и вертикальном направлениях и под углом к оси вакуумного манипулятора посредством шпилек 19 и винтов 20. Шпильки 19 одним концом ввернуты на резьбе во фланце 18, а другим свободно упираются в проточки фланца 17. Путем вьшертывания или завертывания шпилек передается усилие на фланец и таким образом осуществляется деформация связанного с фланцем сильфона 16 и вместе с ним перемещение герметичного корпуса 1 с расположенным в нем схватом в нужном направлении. Винты 20 фиксируют установленное положение и, кроме того, позволяют дополнительно деформировать сильфон 16 в горизонтальной и вертикальной плоскостях, облегчая тем самым выверку изделия относительно приемного столика.
Формула изобретения
Вакуумный манипулятор, содержащий герметичный корпус, установленный в нем ползун, кинематически связанный с механизмом его продольного перемещения, и схват с приводом, установленный на этом ползуне, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения точной установки схвата в пространстве, он снабжен стыковочным узлом, выполненным в виде двух фланцев, соединенных силь- фоном,в полости которого коаксиально размещен ползун со схватом, причем фланцы установлены с возможностью регулировочного перемещения друг относительно друга посредством шпилек, установленных в отверстиях этих фланцев, при этом на фланцах выполнены выступы, расположенные на разных уро. нях параллельно оси ползуна и соедиными винтами, причем один из фланцев
герметичным корпусом.
| название | год | авторы | номер документа |
|---|---|---|---|
| Вакуумный манипулятор | 1990 |
|
SU1754442A1 |
| Вакуумный манипулятор | 1985 |
|
SU1315293A1 |
| Установка для молекулярно-лучевой эпитаксии | 1984 |
|
SU1231920A1 |
| УСТРОЙСТВО ДЛЯ ЗАГРУЗКИ И ВЫГРУЗКИ ИЗДЕЛИЙ В ВАКУУМЕ | 1985 |
|
SU1340230A1 |
| СОЕДИНИТЕЛЬНАЯ МУФТА ТРУБОПРОВОДОВ С ПРИВОДОМ | 2024 |
|
RU2832372C1 |
| Манипуляционная система | 1990 |
|
SU1784451A1 |
| Манипулятор | 1991 |
|
SU1757876A1 |
| Односторонний вакуумный клапан шиберного типа | 1985 |
|
SU1275175A1 |
| Устройство для стыковки сменного инструмента манипулятора | 1984 |
|
SU1288047A1 |
| УСТРОЙСТВО ДЛЯ ОБРАБОТКИ ИЗДЕЛИЙ ЭЛЕКТРОННОЙ ТЕХНИКИ | 1992 |
|
RU2034362C1 |
Изобретение относится к устройствам вакуумной техники и предназначено для передачи изделий в вакуумных установках. Целью изобретения является расширение технологических возможностей за счет обеспечения точной установки схвата в пространстве. Манипулятор снабжен стыковочным узлом, который выполнен в виде сильфона 16с двумя фланцами 17 и 18. Фланец 17необходим для крепления стыковочного узла к герметичному корпусу 1, а фланец 18 - для крепления вакуумного манипулятора на вакуумной камере. Фланцы 17 и 18 установлены с возможностью регулировочного перемещения друг относительно друга и связаны посредством шпилек 19. На фланцах 17 и 18 выполнены выступы, расположенные на разных уровнях параллельно оси ползуна 2, и соединены попарно винтами 20, осуществляющими также регулировку относительного положения фланцев . 2 ил. (Л
Физ.2
| Вакуумный манипулятор | 1979 |
|
SU823117A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
