1
Изобретение относится к машино- строению и может .быть использовано в различных его областях, например Б роботостроении.
Известен пневмо(гидро)цилиндр, содержащий корпус, с полым поршнем, кинематически связанным со штоком посредством тел качения, установленных в полости поршня с натягом между поверхностями корпуса и штока 1 .
Недостатком известного пневмо(гиро) цилиндра является низкая степень надежности и недолговечность вследствие износа контактирующих поверхностей корпуса и штока.
Цель изобретения - повышение .надежности и долговечности.
Поставленная цель достигается тем, что шток выполнен в виде упругой цилиндрической гильзы.
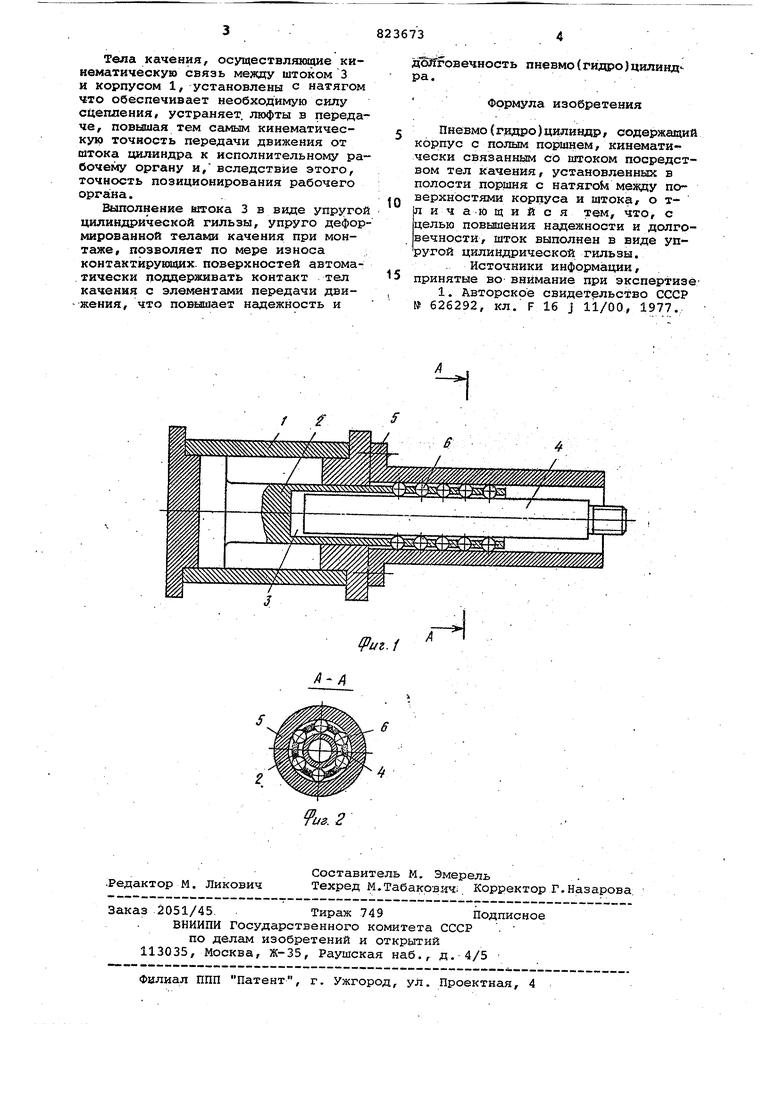
На фиг. 1 представлен пневмо(гидро)цилиндр, продольный разрез} на фиг.. 2 - сечение А-А на фиг.1.
Пневмо(гидро)цилиндр содержит корпус 1 с полым поршнем 2, кинематически связанным со штоком 3 посредством тел 4 качения, установленных в полости 5 поршня 2 с натягом между поверхностями корпуса 1 и штока 3, причем последний выполнен в виде упругой цилиндрической гильзы. . . .
Пневмо(ридро)цилиндр работает следукиций образом.
В рабочую полость цилиндра подают рабочую среду, например сжатый воздух, при этом поршень 2 перемещается вместе с телами 4 качения, которые катятся по внутренней цилиндрической поверхности корпуса 1 и одновременно вращаются вокруг своих осей, неподвижных относительно поршня 2 и перемещающихся относительно .корпуса 1 со скоростью, равной скорости поршня 2. При этом тела 4 качения взаимодействуют со штоком 3, вызывая его перемещение в том же направлении. Если мгновенный радиус вращения тела 4 качения в точке контакта со штоком 3 в два раза больше мгновенного радиуса вращения центра тела 4 качения относительно внутренней поверхности корпуса 1, то скорость штока 3 в два раза превышает, скорость центров тел 4 качения,а, следовательно, и скоррстЬ перемещения поршня 2. При этом |Длина хода штока 3 также увеличивает1ся в два раза.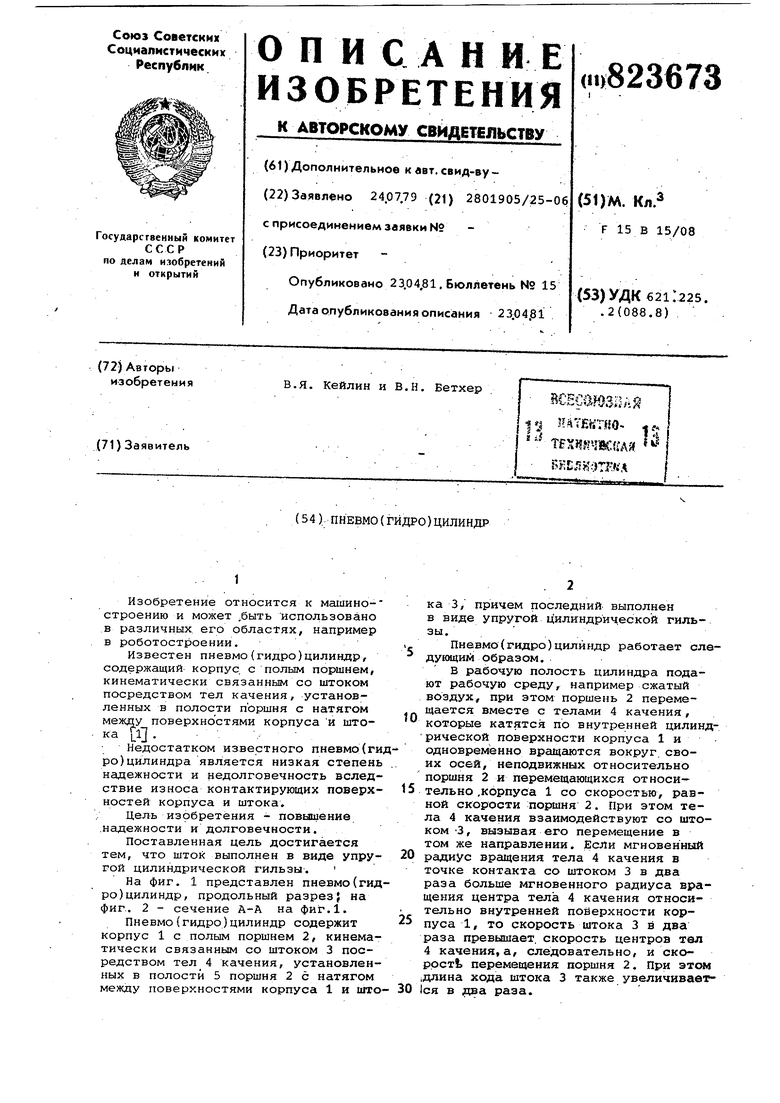
| название | год | авторы | номер документа |
|---|---|---|---|
| Шпиндельный узел расточно-отделочного станка | 1984 |
|
SU1456284A1 |
| Схват промышленного робота | 1979 |
|
SU831613A1 |
| Схват промышленного робота | 1981 |
|
SU1009758A1 |
| Гидро(пневмо)цилиндр | 2016 |
|
RU2692867C1 |
| Манипулятор | 1986 |
|
SU1318394A1 |
| Гидро(пневмо)цилиндр | 2016 |
|
RU2681877C1 |
| Гидро(пневмо)цилиндр | 2016 |
|
RU2692885C1 |
| ДВОЙНОЙ ЦИЛИНДРОПОРШНЕВОЙ БЛОК ВЫСОКОГО ДАВЛЕНИЯ | 2009 |
|
RU2451831C2 |
| Гидро(пневмо)цилиндр | 2016 |
|
RU2682216C1 |
| БЕСКРИВОШИПНЫЙ ДВИГАТЕЛЬ | 1999 |
|
RU2182241C2 |
