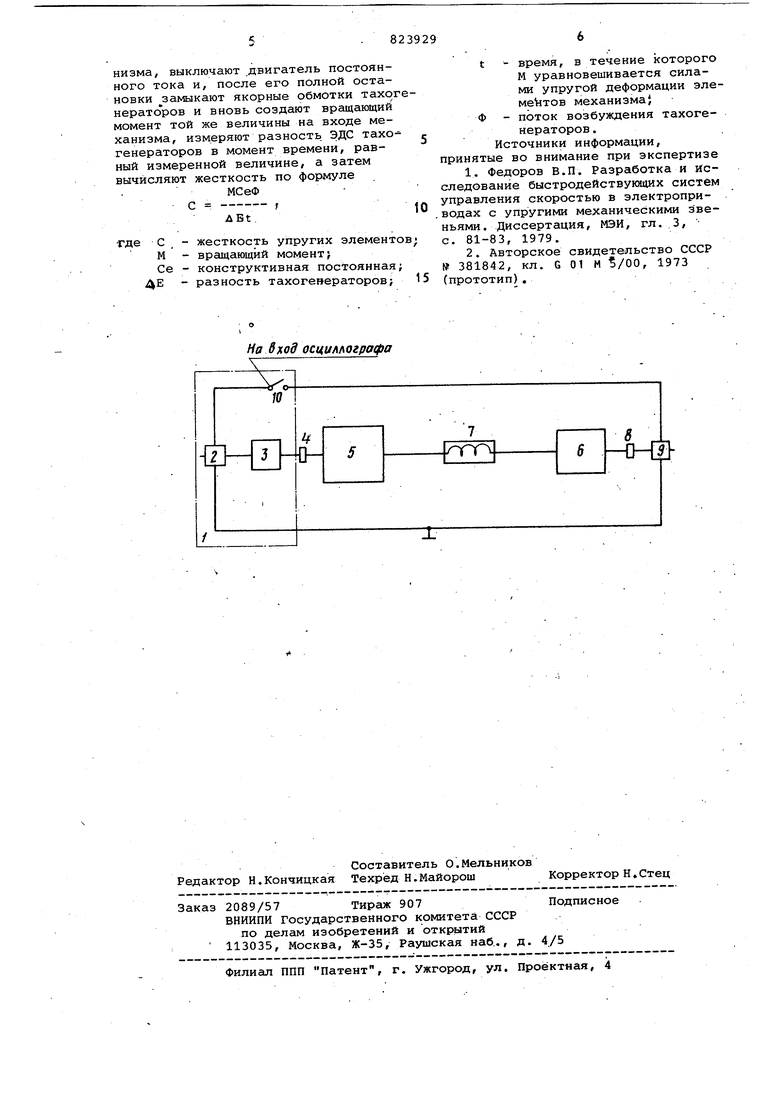
деформации элементов механизма, выключают двигатель постоянного тдка и после его полной остановки, эакыкают якорные обмотки тахогенераторон и вновь создают вращающий момент той же величины на входе механизма, измеряют разность ЭДС тахогенераторов и момент времени,-равны измеренной величине, а затем вычисляют жесткость по формуле МСеФ С ; , . Д E-t . где С - жесткость упругих элементо М -вращающий момент; Се -конструктивная постоянная; Ф -поток возбуяодения тахогенераторов;д Е -разность ЭДС тахогенераторов;t -время, в течение которого вращающий момент уравновеши ется силами упругой деформа ции элементов механизма. На чертеже представлена схема Vcтpoйcтвa, реализующая предлагаемы способ. Устройство содержит измерительны блок 1, состоящий из жестко связанных тахогенератора 2 и двигателя 3 постоянного тока, который посредством жесткой муфты 4 соединен с вало двигателя 5 исполнительного механиз ма 6. Двигатель 5 через упругое зве 7 соединен с входным валом исполнительного механизма 6, к выходному валу которого посредством жесткой муфты 8 присоединен тахогенератор идентичный тахогенератору 2, Ключ 10 служит для встречного соединени якорных обмоток тахогенераторов 2 и 9. Определение жесткости с помощью этого устройства осуществляют следу ющим образом. Создают вращающий момент М зада ной величины на входе двигателя 5 при отсутствии момента сопротивления. Для этого скачком увеличивают электромагнитный момент двигателя 3 до заданной величины М const. Измеряют время t, в течение которо вращающий момент М уравновешиваетс моментом (. АБф} f создаваемым силами упругой деформации звена 7. Для-этого сигнал ЭДС тахогенератор 2 подают 1на вход осциллографа (на схеме осциллограф не показан), по которому фиксируют мсмент времени, когда ЭДС тахогенератора2 достигнет максимума и начнет уменьшаться Этот момент времени характерен равенством М Mvпi.Aeф./ так как. до этого моменту времени инерционная масса механизма 6 начинает разгоняться (М .деф.) послё- этого момента времени Масса замедляется (М .АСФ.) Затем выключают систему электропривода блока 1 и,после полной остановки двигателя 3, замыкают ключом 10 якорные обмотки тахогенераторов 2 и 9.- Вновь создают вращающий момент М const величины на входе двигателя 5 и измеряют с помоью осциллографа разность дЕ ЭДС тахогенераторов в момент времени t, равный измеренной величине. Затем искомую жесткость выч сляют по формулеС - , AEt где С - жесткость упругих элеменМ - вращающий момент; Се - конструктивная постоянная; Ф - поток возбуждения тахогенераторов 2 и 9; t - время, в течение которого вращающий момент уравновешивается моментом, создаваемым силами упругой деформации . Для повышения точности определения жесткости, процесс измерения повторяют несколько раз и жесткость определяют по формуле С - ч, - -- ) п где п - число измерений. Предлагаемый способ не требует . жесткой зделки вала исследуемого механизма. Поломка и повреждение исследуемого механизма и его двигателя исключены. Если двигатель исследуемого механизма питается от источника постоянного тока, то применение специального двигателя постоянного тока не требуется. Формула изобретения Способ определения жесткости упругих элементов исполнительного механизма, заключающийся в том, что создают, нагрузку на входном валу механизма и измеряют деформацию упругих элементов от действия этой нагрузки, отли чающийся тем, что, с целью исключения повреждения иccлeдyeмo o механизма при рпределении жесткости его упругих элементов, устанавливают на входе и выходе механизма по идентичному тахогенератору, создают вращающий момент заданной величины на входе механизма с помощью двигателя постоянного тока-,при отсутствии момента сопротивления и разомкнутых якорных обмотках тахогенераторов, измеряют бремя, в течение которого вращающий момент уравновешивается силами упругой деформации элементов механиэма, выключают двигатель постоянного тока и, после его полной остановки замыкают якорные обмотки тахог нераторов и вновь создают вращающий момент той же величины на входе механизма, измеряют разность. ЭДС тахогенераторов в момент времени, равный измеренной величине, а затем вычисляют жесткость по формуле МСеФ С f где С , - жесткость упругих элемент М - вращающий момент Се - конструктивная постоянная ДЕ - разность тахогенераторов; t - время, в течение которого М уравновешивается силами упругой деформации элеме тов механизма} Ф - поток возбуждения тахогенераторов . Источники информации, принятые во внимание при экспертизе 1.Федоров В.П. Разработка и исследование быстродействующих систем управления скоростью в электроприводах с упругими механическими звеньями. Диссертация, МЭИ, гл, 3, с, 81-83, 1979. 2.Авторское свидетельство СССР 381842, кл. G 01 М S/00, 1973 (прототип),
| название | год | авторы | номер документа |
|---|---|---|---|
| Вентильный электродвигатель и способ его настройки | 1989 |
|
SU1772875A1 |
| Интегрирующий привод постоянного тока | 1989 |
|
SU1716480A1 |
| УСТРОЙСТВО ИЗМЕРЕНИЯ КОЭФФИЦИЕНТА СЦЕПЛЕНИЯ КОЛЕСА С ПОВЕРХНОСТЬЮ АЭРОДРОМНЫХ И ДОРОЖНЫХ ПОКРЫТИЙ | 2008 |
|
RU2369856C1 |
| Устройство для испытания электроприводов | 1987 |
|
SU1515314A1 |
| Устройство для испытания блока гистерезисных электромагнитных муфт | 1983 |
|
SU1148010A1 |
| Способ регулирования скорости электропривода многомассовой системы | 1991 |
|
SU1820470A1 |
| Способ управления приводом резонансного манипулятора | 1988 |
|
SU1593946A1 |
| Цифроаналоговое устройство управления летучими ножницами с механизмом выравнивания скоростей | 1990 |
|
SU1712078A1 |
| Способ измерения сложных механических деформаций с помощью аморфной металлической ленты и устройство для калибровки чувствительного элемента | 2018 |
|
RU2708695C1 |
| Устройство для измерения электромагнитной постоянной времени якорной цепи электродвигателя | 1977 |
|
SU736278A1 |
На вход осиилг(ографа
