(54) УСТРОЙСТВО ДЛЯ КОНТРОЛЯ ПРЕОБРАЗОВАТЕЛЕЙ УГЛА ПОВОРОТА ВАЛА В КОД
семейства присутствует различная по значению постоянная составляющая. Следовательно, кривые семейства диаграмм, изображающие функции разностной погрещности, оказыва1отся с различным смещением по отношению к оси абсцисс. Явление, когда кривые, получаемые при совокупных измерениях, имеют различное смещение относительно оси абсцисс, характерно для подобных измерений. Указанный недостаток усложняет дальнейщую графическую обработку результатов, а также вносит в нее определенную погрешность по следующей причине. Кривые семейства диаграмм содержат определенный спектр гармоник с различными амплитудами и различной начальной фазой. В результате они имеют сложную форму и несимметричны относительно оси абсцисс, поэтому постоянную составляющую в диаграмме невозможно простыми способами определить и отделить от переменной составляющей, которая представляет измеряемую величину. В итоге положение оси абсцисс на таких диаграммах оказывается не определенным и его необходимо вычислять методом последовательных приближений (проб и ошибок), что оказывается трудоемким процессом и приводит, кроме того, к погрешностям обработки результатов.
Цель изобретения - повышение точности контроля преобразователей угла поворота вала в код.
Поставленная цель достигается тем, что в устройство для контроля преобразователей угла поворота вала в код, содержащее образцовый преобразователь угла поворота вала в код, соединенный через интерполятор с первым входом блока преобразования разности фаз в число импульсов, а через первый формирователь импульсов - со вторым входом блока преобразования разности фаз в число импульсов, вход второго формирователя импульсов соединен с выходом контролируемого преобразователя угла поворота вала в код, а выход второго формирователя импульсов соединен с третьим входом блока преобразования разности фаз в число импульсов, первый и второй выходы которого соединены с первым и вторым входами первого реверсивного счетчика, выход которого соединен с первым входом первого блока элементов И, третий выход блока преобразования разности фаз в число импульсов соединен со вторым входом первого блока элементов И, выход которого соединен с входом первого регистра памяти, цифроаналоговый преобразователь, выход которого соединен с регистрирующим блоком, введены сумматор, второй регистр памяти, второй блок элементов И, второй реверсивный счетчик и дополнительные счетчики, входы первого, второго и третьего дополнительных счетчиков соединены соответственно с первым, вторым и третьим выходами блока преобразования разности
фаз в число импульсов, выходы первого и второго дополнительного счетчика соединены с первым и вторым входами второго реверсивного счетчика, выход которого соединен с первым входом второго блока элементов И, второй вход которого соединен с выходом третьего дополнительного счетчика, а выход второго блока элементов И соединен со входом второго регистра памяти, выход которого соединен с первым входом сумматора, выход первого регистра памяти соединен со вторым входом сумматора, выход которого соединен со входом цифроаналогового преобразователя.
Такое выполнение устройства для контроля преобразователей угла поворота вала в код обеспечивает при измерении во всех зарегистрированных . диаграммах отсутствие постоянной составляющей, в результате чего ось абсцисс в каждой из диаграмм совпадает с линией, соответствующей нулю на входе самописца, что позволяет совмещать диаграммы непосредственно после их записи или производить наложение диаграмм в процессе их записи путем записи следующих диаграмм поверх предыдущих.
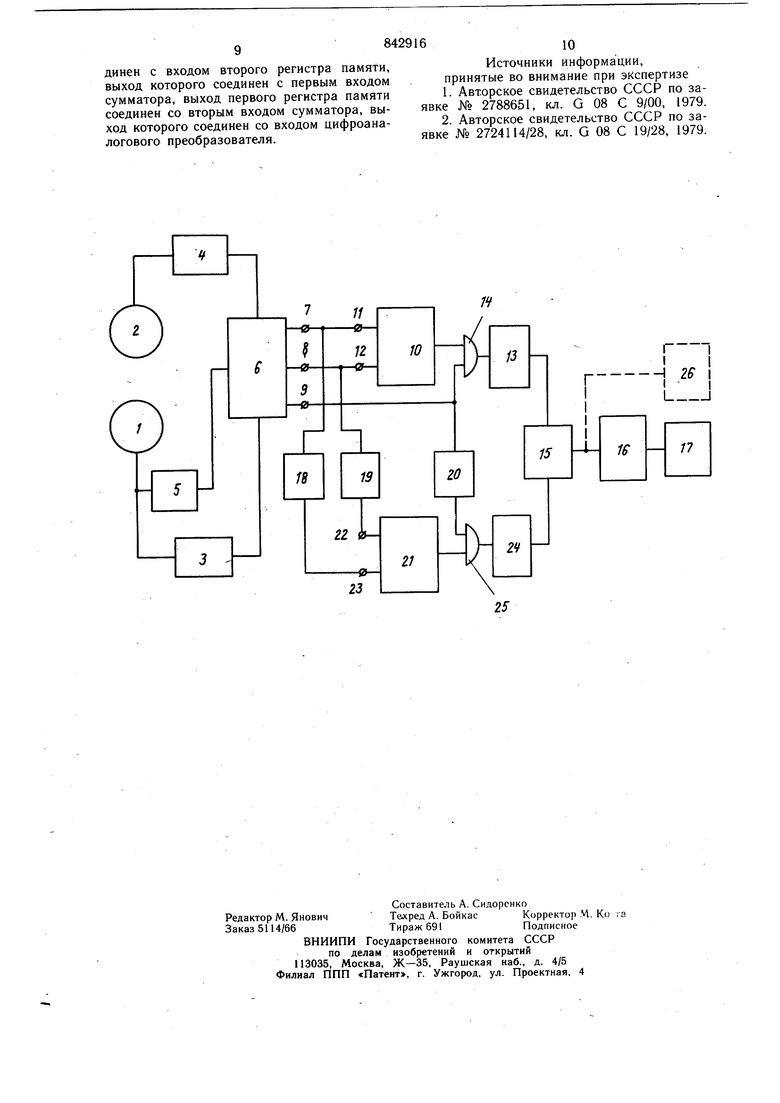
, На чертеже приведена функциональная схема устройства.
Устройство содержит образцовый преобразователь 1 угла поворота вала в код и поверяемый преобразователь 2 угла поворота вала в код, формирователи 3 и 4
0 импульсов, соответствующих границам угловых квантов, интерполятор 5 сигналов образцового преобразователя, блок 6 преобразования разности фаз в число импульсов, содержащий выходы 7 и 8 импульсов прямого и обратного счета и выход 9 сигналов
5 управления, реверсивный счетчик 10 импуль-сов со входами 11 и 12 соответственно прямого и обратного счета с регистром 13 памяти и блок 14 элементов И, сумматор 15, цифроаналоговый преобразователь 16, реjj гистрирующий блок 17, счетчики 18, 19 и 20 по переменному модулю, а также второй реверсивный счетчик 21 импульсов, снабженный входами 22 и 23 соответственно прямого и обратного счета, регистром 24 памяти и блок 25 элементов И. Для цифровой регистрации результатов устройство дополняется перфоратором 26.
Устройство работает следующим образом.
При синхронном вращении роторов преобразователей 1 и 2 погрешности преобразования угла преобразователя 2 по отношению к преобразователю 1 проявляется в виде разности фаз импульсов на выходах формирователей 3 и 4. Импульсы сравниваются по фазе в блоке 6, который формиJ рует пакеты счетных импульсов таким образом, что число импульсов в пакете пропорционально разности фаз сравниваемых импульсов. При этом в зависимости от знака погрешности и, следовательно, знака разности фаз счетные импульсы узла 6 поступают на выход 7 прямого счета при положительном знаке или на выход 8 обратного счета при отрицательном знаке погрешности. В счетчике 10 сосчитывается соответственно положительное или отрицательное число, код которого пропорционален погрешности с учетом знака. После каждого фазового сравнения импульса от преобразователя 1 и импульса от преобразователя 2 на выходе 9 блока 6 формируется сигнал управления, который открывает блок 14 элементов И. Код с выхода счетчика 10 перезаписывается в регистр 13 памяти, после чего счетчик 10 обнуляется для подготовки к следующему измерению фазы (цепи сброса в нуль не показаны). Таким образом, при синхронном вращении роторов преобразователей 1 и 2 на выходе регистра 13 памяти происходит ступенчатая смена кода в соответствии со значениями разностной погрешности углов, отсчитываемых по импульсам от преобразователей 1 и 2. После преобразования кода в аналоговую величину при помощи цифроаналогового преобразователя 16 блок 17 регистрирует разностную погрешность в виде диаграммы. Регистрацию выполняют в течение одного или нескольких оборотов. После пересопряжения углового взаимоположения статоров преобразователей 1 и 2 путем поворота статора преобразователя 1 йа определенный угол выполняют запись второй диаграммы разностей погрешности. Аналогичным образом выполняются записи всего семейства диаграмм так, что дискретные угловые смещения статора преобразователя 1 достигамт угла 360°. Затем для выявления погрешности преобразователя 2, статор которого не поворачивали, диаграммы необходимо совмещать по оси абсцисс, а также по отметкам начала записей. Однако в получаемых значениях кода на выходе регистра 13 памяти неизбежно присутствует постоянная составляющая, эквивалентная постоянному фазовому сдвигу f о между сравниваемыми импульсами. Причем после повторных пересопряжений статоров преобразователей 1 и 2 значение ее изменяется, поскольку при сопряжениях практически невозможно устанавливать угловое взаимоположение статоров таким, чтобы постоянная составляющая фазы fo между импульсами, соответствующими границам угловых квантов, могла быть сведена к нулю. Если ее значение не скомпенсировано, то в диаграммах, получаемых в блоке 17, имеется также постоянная составляющая, что приводит к нежелательным последствиям. Вычисление составляющей fo основано на следующем принципе. Известно, что сумма погрешностей деления круга (угла 23) равна нулю, что вытекает и5 физической сущности деления полного угла 2др на некоторое число N частей. Следовательно, .,(1) где A,A)fi, -соответственно погрешность i-ro углового деления (кванта) образцового 1 и поверяемого 2 преобразователей; N - число угловых делений преобразователей 1 и 2. Несложный анализ показывает, что разность углов, номинальные значения которых одинаковы, равна разности их погрешностей. Следовательно, разность угловых квантов, отсчитываемых по импульсам, соответствующим их границам, равна разности погрешностей этих квантов Ti-4.,(2) - i-ые угловые кванты соответственно поверяемого 2 и образцового 1 преобразователей. Если просуммировать все N квантов в левой части уравнения (2) и все N погрешностей в правой части, что соответствует полному обороту роторов преобразователей 1 и 2, то получается ииц -Д () .(3) с учетом зависимости (1) следует, что правая часть уравнения (3) равна нулю. Это означает, что сумма разностных погрешностей, измеренных на один оборот, должна быть равна нулю Lf.()0-(4) Если в результате измерения оказывается, что Ll,()A, следовательно, значение А равно сумме постоянных составляющих в N дискретных измерениях, полученных за один оборот роторов преобразователей 1 и 2. Отсюда находят кодовое значение постоянной составляющей фазы о -ЛГ--(5) Го-ffЕсли на второй вход сумматора,15 вводят полученное значение Цо. но с противоположным знаком, т. е. в виде значения минус , то постоянная составляющая в поступающих на первый вход сумматора кодовых значениях разностной погрешности скомпенсируется. Тогда на выходе сумматора 15 имеется лишь переменная составляющая, которая представляет собой измеряемую величину. При этом ось абсцисс на диаграммах самописца совладает с линией, прочерченной при отсутствии сигнала на его входе, т. е. положение оси определяется автоматически. Реверсивный счетчик 21 совместно со счетчиками 18-20 по переменному модулю выполняют вычисление функции tl.)(6)
атем значение минус перезаписывается регистр 24 памяти, а с его выхода постуает на второй вход сумматора 15.
Вычисление по формуле (6) выполняется следующим путем.
За один оборот роторов преобразователей 1 и 2 выполняется N сравнений по фазе, на выходах 7 или 8 узла 6 формируется N пакетов импульсов счета, а на выходе 9 N сигналов управления. Импульсы с выходов 7 и 8, кроме того, что они сосчитываются реверсивным счетчиком 10, поступают через счетчики 18 и 19 по переменному модулю на входы реверсивного счетчика 21. Но импульсы с выхода 7, соответствующие положительному значению фазы, поступают на вход 23 обратного счета, и наоборот, импульсы обратного счета поступают на вход 22 прямого счета, так что кодовые значения на выходе счетчика 21 имеют противоположный знак по сравнению с кодовыми значениями счетчика 10. Таким образом получают знак минус при значении Чо- Счетчик 21 не обнуляют после каждого сравнения по фазе и за один оборот роторов преобразователей 1 и 2 он суммирует все N значений разностной погрещности. Модули в счетчиках 18 и 19 выбирают равными N, поэтому с их помощью сумма значений разностной погрешности поделена на число N. Сигналы управления с выхода 9 блока 6 поступают на блок 25 элементов И через счетчик 20 по переменному модулю, который также устанавливают равным N. Это обеспечивает перепись в регистр 24 памяти кода с выхода счетчика 21 один раз за полный оборот роторов, а также один сброс показаний счетчика 21 после переписи результата (цепь сброса в нуль счетчика 21 не показана). В итоге в конце каждого оборота на выходе регистра памяти 24 находится кодовое значение, эквивалентное значению минус в соответствии с формулой (6).
Очевидно, что компенсация постоянной составляющей наступает после первого оборота. В дальнейщем регистр 24 памяти удерживает значение минус Ро, а поскольку при каждом конкретном сопряжении преобразователей 1 и 2 постоянная составляющая стабильна по значению, то при повторных оборотах значение минус fj в регистре 24 памяти подтверждается повторной перезаписью. Очевидно, что устройство позволяет выполнять измерения после первого оборота, который должен быть использован для измерения fo и его компенсации. Однако это не отражается на эффективности выполнения поверки, так как потеря времени здесь незначительна по сравнению с общими затратами времени, а в итоге время поверки резко сокращается за счет повыщения производительности при обработке результатов измерений.
Поэтому технико-экономическая эффективность предлагаемого устройства заключается в повышении не только точности поверок, но и производительности выполняемых операций. Поскольку постоянная составляющая в измерительном сигнале, которая затрудняет обработку результатов, вычисляется и компенсируется в устройстве автоматически и с высокой точностью, то с аналогичной точностью определяется положение оси абсцисс на регистрируемых диаграммах. В результате исключается вычисление положения на диаграммах оси абсцисс графически методом последовательных приближений, исключается, следовательно, и время, необходимое для этих вычислений, а также повышается точность совмещения семейства диаграмм и получения конечного результата измерения.
Формула изобретения
Устройство для контроля преобразователей угла поворота вала в код, содержащее образцовый преобразователь угла поворота в код, соединенный через интерполятор с первым входом блока преобразования разности фаз в число импульсов, а через первый формирователь импульсов - со вторым в-ходом блока преобразования разности фаз в число импульсов, вход второго формирователя импульсов соединен с выходом контролируемого преобразователя угла поворота вала в код, а выход второго формирователя импульсов соединен с третьим входом блока преобразования разности фаз в число импульсов, первый и второй выходы которого соединены с первым и вторым входами первого реверсивного счетчика, выход которого соединен с первым входом первого блока элементов И, третий выход блока преобразования разности фаз в число импульсов соединен со вторым входом первого блока элементов И, выход которого соединен со входом первого регистра памяти, цифроаналоговый преобразователь, выход которого соединен с регистрирующим блоком, отличающееся тем, что, с целью повышения точности контроля преобразователей угла поворота вала в код, в него введены сумматор, второй регистр памяти, второй блок элементов И, второй реверсивный счетчик и дополнительные счетчики, входы первого, второго и третьего дополнительных счетчиков соединены соответственно с первым, вторым и третьим выходами блока преобразования разности фаз в число импульсов, выходы первого и второго дополнительного счетчика соединены с первым и вторым входами второго реверсивного счетчика, выход которого соединен с первым входом второго блока элементов И, второй вход которого соединен с выходом третьего дополнительного счетчика, а выход второго блока элементов И соединен с входом второго регистра памяти, выход которого соединен с первым входом сумматора, выход первого регистра памяти соединен со вторым входом сумматора, выход которого соединен со входом цифроаналогового преобразователя.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР по заявке № 2788651, кл. G 08 С 9/00, 1979.
2.Авторское свидетельство СССР по заявке № 2724114/28, кл. G 08 С 19/28, 1979.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической проверки преобразователя угол-код | 1987 |
|
SU1441478A1 |
| МОНОИМПУЛЬСНАЯ РАДИОЛОКАЦИОННАЯ СИСТЕМА | 2004 |
|
RU2260195C1 |
| Устройство аналого-цифрового преобразования | 1991 |
|
SU1807559A1 |
| Функциональный преобразователь | 1984 |
|
SU1176344A1 |
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| Устройство аналого-цифрового преобразования | 1988 |
|
SU1501268A2 |
| Функциональный преобразователь | 1985 |
|
SU1249547A1 |
| Функциональный преобразователь | 1984 |
|
SU1211756A1 |
| Устройство измерения времени разгона вала электродвигателя | 2022 |
|
RU2796152C1 |
| Преобразователь фазового сдвига в цифровой код | 1982 |
|
SU1056073A1 |
